LiDAR全地貌曲线与DLG自动融合研究
2012-06-29宋新龙田耀永吕宝奇
宋新龙,田耀永,吕宝奇
(河南省测绘工程院,河南郑州 450002)
1 引言
机载激光扫描(简称LiDAR)是一种新型测量技术,并在实际生产中已经得到了广泛应用。LiDAR可快速获取高密度、高精度的地表点云数据,地表点云数据经过滤波处理后得到地面点。由于点云数据的密度非常高,经过滤波后依然有足够的密度,即使滤波后空洞的地方也可用内插的方法予以填补,所以与传统的方法生产的地貌曲线相比较,LiDAR生产的地貌曲线地表覆盖更全面,由于LiDAR数据的海量特性和全覆盖特性,如果采用传统的方式来解决地貌曲线与DLG的融合,工作量将是非常的大,这就需要研究LiDAR的全地貌曲线与DLG中地物要素自动融合问题。本文以AutoCAD为平台对LiDAR全地貌曲线与DLG自动融合进行了比较深入的研究,采用AutoCAD开发技术完成了相应程序的开发工作,并取得了较好的生产效果。
2 问题研究
2.1 思路
要解决LiDAR全地貌曲线与DLG的自动融合,主要是解决等高线与地物的相交断开的问题。我们可以把DLG中的地物分为两类:即线状地物(如单线路等)和面状地物(如居民地)。根据他们之间的交点情况进行打断、选择删除等处理从而达到自动融合的目的。
2.2 算法
(1)将DLG中地物分为两类:线状地物和面状地物。
(2)线状地物和面状地物分别与等高线求交计算得到交点,并将等高线在交点处断开。
(3)判断等高线的各部分是否在封闭的面状地物内,将包含在面状地物内的部分删除。
(4)判断所有的等高线的长度是否小于某个固定值,删除所有小于该固定值的等高线。
2.3 流程图
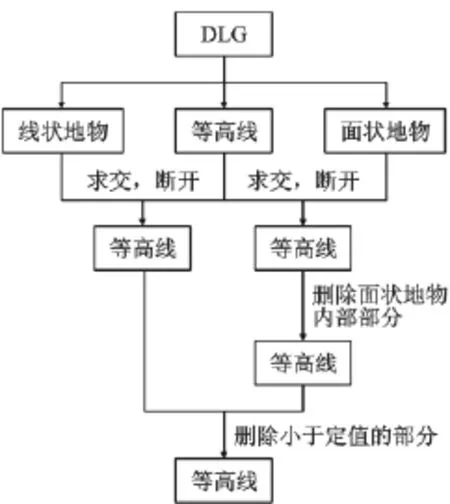
图1 流程图
3 程序的设计
由于国内DLG成图大部分都是DWG格式,所以本程序采用VC++2005和ObjectARX SDK开发环境,在AutoCAD平台下进行二次开发,采用上述的算法思路进行编程,部分代码如下:


4 实例验证
为验证上述思路,我们在AutoCAD 2008平台上,选择一块1∶1 000的地形图,图中包含有道路、水渠、居民地等设施。程序运行结果如图2所示。
5 总结
通过对实例结果分析,表明该程序运行性能良好,结果正确。实现了LiDAR全地貌曲线与DLG的自动融合,大大减少了人机交互工作,提高了工作效率。
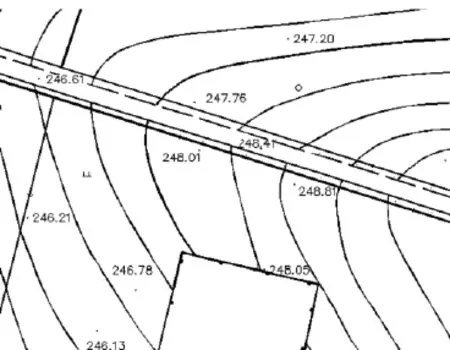
图2 运行效果图
[1]谢纯良,吴立新,金学林.基于CAD的等高线遇地物自动断开新方法研究[J].矿山测量,1997(3)
[2]王宗跃,马洪超,彭检贵等.基于LiDAR数据生成光滑等高线[J].武汉大学学报(信息科学版),2010(11)
[3]周卿,李能国.基于机载激光雷达技术的地形图成图的探讨[J].城市勘测,2010(1)
[4]高莹忠立体视觉和Lidar的数据融合[D].硕士学位论文,南京,南京理工大学,2009
[5]李英成,文沃根,王伟.快速获取地面三维数据的LIDAR技术系统[J].测绘科学,2002(4)
[6]陈峥,徐祖舰.融合影像的LiDAR点云数据分类方法[J].微型计算机,2011(5)
