数字全景地图技术及在规划管理中应用的研究
2012-06-29朱圣罗再谦龙川
朱圣,罗再谦,龙川
(重庆数字城市科技有限公司,重庆 400020)
1 引言
随着互联网技术的飞速发展,全景技术已经被广泛认可。Google街景就是一个典型的例子。全景的一个最大的特点就是直观和真实。众所周知,传统4D数据是对地理特征的数学抽象,通过点、线、面简化纷繁复杂的现实世界,其存在的问题:抽象的东西不容易被大众所理解;观测点都是自上而下,容易引起普通用户空间错乱。而全景技术基于图片或视频,给人直观的感觉,并且观测点也与普通人的观察位置一致,所以更容易被人接受。传统4D产品适合描述宏观世界,而全景技术适合描述微观世界,全景技术作为4D产品的有益补充,逐渐得到3S行业的广泛关注。目前,全景技术在国内大多用于展览展示类项目,没有发挥其巨大的潜力,把全景技术与3S、机器视觉、3D、移动测量等前沿技术结合,赋予全景空间、时间等属性,可以挖掘全景技术中更多的增值应用点。本文主要以重庆数字城市科技有限公司研发的数字全景地图(Digital Panorama Map,DPM)产品为对象,探讨数字全景地图的核心技术,并结合规划管理行业,探讨该技术在规划行业的应用点。
2 发展现状
全景技术发端于上世纪90年代末,当时数码照相技术的发展,全景技术逐步走入了人们的视野。由于最初的全景技术只用于展示,目的是为用户提供更大视野的照片,从定位上严重制约了全景技术的发展。随着3D技术和机器视觉技术的发展,并不断的与全景技术融合,极大的拓展了全景技术的外延和内涵,使得全景技术在3S的应用上取得了质的飞跃。以DLG、DRG、DEM、DOM为代表4D数据产品已成为3S行业数据应用的主流,而且在今后若干年它们仍将占据主导地位。但在数字全景地图上,除了有少数企业进行跟进外,目前可以说是一个新兴领域。国外的Google、Microsoft采用自主研发或收购方式建立起软硬件平台,其目标在于获得全球街面数据,为其网站提供增值服务。国内的城市吧、立得、武汉市测绘研究院等公司或研究机构也一直从事这方面的研究。
全景摄像机,作为全景采集的核心部件,目前并没有一个统一的行业规范,比如PointGray的Ladybug系列产品,Immersive Media公司的Dodeca 2360产品以及国内的武汉市测绘研究院等单位联合研制的全景采集设备。这些设备一个共同的特点就是通过多张同光心的照片拼接成球面、立方体或柱面投影的全景照片。采集平台方面,一些采集平台集成了激光雷达、惯导单元、速度传感器等设备。软件方面,部分产品实现了全景的移动测量功能。大部分产品还只是使用全景与地图结合的简单展示功能。一些产品通过把全景与激光点云叠加,快速进行现场数据调查。
3 关键技术
DPM涉及数据采集、数据加工、数据建库、数据发布等环节。下面对各个环节中的核心技术分别讨论。
3.1 采集平台
最简单的DPM采集平台涉及:Ladybug 3.0全景摄像机,GPS接收机,移动图形工作站。
PointGray公司的Ladybug 3.0全景摄像机是全景采集的核心部件。该产品集成度高,安装灵活方便,适合便携式安装部署。该产品使用6个工业相机,水平面5个相机均匀分布,另外一个相机正对天空。每个相机使用鱼眼镜头,可以保证相邻相机有部分视野重叠。Ladybug采集的全景以流的形式写入硬盘,流中每帧包含6张JPEG图片,没有实现帧间压缩。
DPM还至少采集GPS数据,可以接入符合NMEA-0183协议的所有GPS终端。为了提高移动测量的精度,在DPMV2中,同时集成陀螺仪和车速传感器。在获得GPS、车速和航向角速度后,很容易恢复全景平台采集数据的线路。线路上的点可以与Ladybug采集的视频帧通过时间同步。
采集平台安装在移动车辆上,并以 30 km/h~40 km/h速度移动,采集的全景数据以PGR格式存储,若以16FPS的帧率采集数据,则磁盘IO为60 MB/s,必须配备移动图形工作站并配置RADI0或使用固态硬盘才能保证写入时无帧丢失。
3.2 数据转换
Ladybug 3.0采集的原始数据没有进行帧间压缩,保存的是每一个相机同时拍摄的6张JPEG照片。Ladybug使用流技术把这6张图片保存在一组PGR文件中。因PGR文件非常大,并且保存的是单张图片的信息,所以该数据基本上很难使用。因此数据转换的主要工作是视频转换,主要步骤是:
(1)打开PGR文件,初始化写视频,i:=0;
(2)读取PGR第i帧,并把6张图片分离出来;
(3)在3D场景中,把同一帧的6张图片分别映射到球面的一部分,建立球面投影模型;
(4)把球面投影再次映射到平面,从而获得单帧的球面投影图片;
(5)把该图片写入视频文件;
(6)如果PGR结束,则结束;否则i:=i+1,并跳转到(1)。
数据转换另一项工作就是GPS坐标的入库,并且GPS坐标要与视频帧进行关联,这样才能把视频的每一帧映射到空间上去。
3.3 可量测连续全景数据
因为单帧全景采集时,各个摄像头的中心位于同一点,因此无法形成视差,故在同一帧中,无法实现移动测量。如图1所示,我们在两个不同的地点观察同一个物体,每一个球体表示一张全景图片,球心表示全景摄像机中心,两个球心与物体的连线必然交汇于物体上,使用射线交汇法来解决移动测量,需要知道连续全景影像每一帧的三维坐标和三轴旋转角度,这6个参数就构成摄像机向量,用(x,y,z,α,β,γ)表示。图 1中第一个全景图片采集的位姿为(x,y,z,α,β,γ),第二个全景图片发生了偏移(△x,△y,△z,△α,△β,△γ)。在使用车速传感器和陀螺仪传感器后,(△x,△y,△z,△α,△β,△γ)获得的数据很精确,因此使用两个全景图片测量获得的相对误差较小,绝对误差由(x,y,z,α,β,γ)决定。
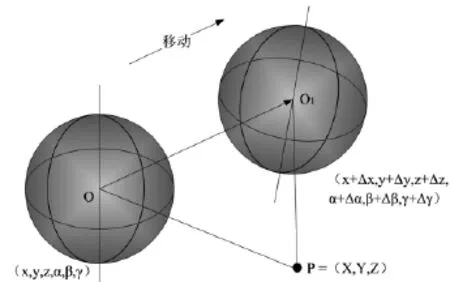
图1 基于全景图片的移动测量
另外,在移动测量中,行驶方向两侧部分最容易形成视差,一般使用全景两侧部分进行移动量测。从O到O1航向发生变化,会引起∠OPO1的较大变化,而俯仰和测滚角度的变化不会引起∠OPO1太大变化。高程z不影响平面测量,因此,影响汽车行驶方向两侧移动测量误差的最大因素是x,y和α的精度。航向数据α可以通过陀螺仪获得很高的精度。从GPS获得的x,y的精度成为影响移动测量精度的关键因素。一般使用RTK或惯导单元获取较高精度的x,y值,从而提高移动测量精度。
3.4 城市影像时空建库
采集的全景数据保存了连续全景影像的空间坐标和时间属性。城市影像建库的目的是把所有全景视频线路在逻辑上打断为原子路段,然后通过拓扑路网进行关联,从而建立起基于道路的视频拓扑。
传统的以Arc和Node为基础的分析路网可以解决路网连通性分析,最短路径分析等功能。在建立全景视频拓扑后,分析对象成为连续的全景视频数据。可以实现全景数据导航功能,在道路交叉口,在全景中显示导航箭头(见图2)。还可以实现历史数据对比,基于同一条Arc对应的多段视频,可以在同一个窗口中同步播放,从而达到历史对比的目的(见图3)。这些功能都基于全景视频数据与拓扑路网的融合。
城市影像库赋予了全景数据新的内涵,与传统4D数据产品一样,城市影像库也是记录城市变迁的重要数据,可以作为一种历史数据长期保存。

图2 全景视频导航

图3 历史数据对比
3.5 B/S端二次开发组件
连续全景影像的B/S端二次开发组件提供全景流媒体播放器功能。图4给出了发布系统框架图。全景浏览器基于Flex开发,提供与其他地图客户端组件集成的JavaScript接口。后台通过流媒体服务器向全景浏览器提供全景视频服务,全景播放器下载线路坐标的XML文件获得视频与空间的对应关系;通过下载拓扑数据获得视频逻辑分段与原子路段的对应关系;全景浏览器提供API接口与地图组件交互。全景播放器的核心功能由对应的API提供JavaScript接口。主要功能包括:
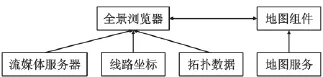
图4 B/S二次开发框架
播放器功能:播放、暂停、视频拖动;
全景浏览功能:360°全景观看与操作、全景局部放大、缩小;
地图交互接口:显示全景的位置与视口范围,在地图中改变全景播放位置,空间跳转接口;
内置功能:视频导航、历史数据对比;
测量功能:辅助面点测量;辅助面面积测量;辅助面长度测量;快速距离测量;跨帧测量;
3D模型功能:3D模型CG融合。
热点功能:热点新建与编辑功能;热点浏览功能;热点查询功能;
其他辅助:亮度、饱和度调整。
4 DPM在规划管理中的应用探讨
DPM作为一种虚拟现实技术,其特点是可与多个行业的具体业务需求结合,下面以规划管理行业为例,探讨DPM在该行业中的应用点。
4.1 街面整治中的应用
DPM技术可以展示街面现状,可以用于主干道综合整治改造。其包括5方面内容:房屋立面、架空线下地、市政设施、绿化和店招广告整治。下面重点介绍房屋立面整治。房屋立面整治主要是根据设计的视觉效果对其外立面进行粉刷。DPM可代替现场调查工作,从预先采集的全景视频中,根据视觉效果,可以方便地发现需要整改的范围(见图5),并通过移动测量,计算出整改的长度或面积,可以作为房屋立面整治预算编制的初步依据。全景数据加工后获得的立面图(见图6),可以作为街面整治的设计参考资料。

图5 代替现场调查

图6 街道立面图
在立面整治过程中,可以从定期采集的全景数据中监控工程进度,并评估整治后的效果,对整治方案进行调整。在房屋立面整治后,可以通过DPM的历史数据对比功能进行整治效果评价。
4.2 市政设施可视化管理
因为DPM数据是可量测的,该数据中蕴含了世界坐标,只要获得市政设施的坐标,就可以在全景数据中把该市政设施的点位可视化地标识出来,通过与属性关联,可以很容易的建立相应的应用系统。
DPM提供的热点功能可以很容易实现该功能。首先使用移动测量技术,在全景中标定市政设施的空间位置,然后与其属性关联。属性信息可以数据库表,也可以是图片,文本等信息,具体如何应用,可以根据应用需求灵活设置。

图7 市政设置与热点的关联
如图7所示,打开显示热点的功能,全景中会加载当前全景空间位置附近的热点,用户通过点击市政设施对应的热点可以方便的查询其属性。该功能类似GIS系统的空间查询,也可以通过属性查询,把全景视频快速定位到指定的热点或市政设施。
4.3 规划业务
在规划应用上,最主要还是将全景摄像的两个特点(360°无死角浏览、移动测量)应用到规划行业中。结合数字全景地图特点,主要可以在规划一书两证业务、批后监察、总平与分层审查、三维方案审批等业务中进行应用。下面就选取其中的几个点:
(1)批后监察
通过数字全景地图采集的在建项目影像,可以为规划监察提供信息化工具,辅助规划监察人员了解到项目违规情况。如图8所示,监察人员可以通过移动测量功能,对比方案中的道路开口,然后与数字全景地图中测量到的4.6 m的道路开口进行对比,发现项目是否违规。

图8 道路开口宽度违规检查
(2)总平与分层平面图
数字全景地图也支持在室内进行全景采集,并能够做到室内的360°浏览和量测。如图9所示,结合规划业务,业务人员可以在全景中测量出入口、消火栓等重点关注物件的尺寸和相对位置,是否与设计相吻合,从而辅助业务人做出正确的判断。现有的数据采集方式一般不会采集如门框高度,消火栓尺寸等信息,而数字全景技术可以一次完成周边可视范围内的各种物件的尺寸信息采集。

图9 总平与分层平面图
(3)全景与三维模型叠加
通过数字全景地图能够在相当短的时间获得街面的实景数据,通过其与项目的三维模型整合,可以方便、快捷的得到建设该项目后实景照片,便于规划管理部门进行决策。如图10所示,模型可以是建筑、交通设施、绿化设施,电力设施,通讯设施等。

图10 全景中融合三维模型
该方法较直接进行三维仿真,可以解决背景模型的采集成本问题,但也存在加载大型三维模型的技术难题。
5 总结及发展趋势
全景技术一般应用于展览展示,把全景技术与移动测量结合,解决了全景视频数据采集,加工,建库、展示环节中的一些关键性问题,赋予全景技术新的生命力。我们使用成熟的全景视频采集摄像头,集成了GPS等传感器作为采集平台;在视频转换过程中,对6个摄像头采集的图片进行拼接生产球面投影的全景视频,同时获得每一帧关联的坐标;通过全景视频时空建库,把全景视频与路网融合,以提供空间查询与时间查询的能力;通过移动测量技术,使全景视频成为可量测的数据;最后介绍了前端B/S全景播放器组件,提供一系列功能API接口,可以与传统GIS系统进行集成。
本文还就DPM技术与规划管理的一些业务进行探讨,DPM的最大特点就是360°无死角与移动测量,这两个特点很容易与规划管理的业务进行关联,比如街面立面整治,可以在方案、设计、评估效果等环节对整治工作进行辅助。基于移动测量的热点功能很容易与市政设施管理结合,通过所见即所得的方式对市政设施进行查询和管理。最后,就规划业务的三个点,我们结合DPM的移动测量相关功能进行分析,发现DPM具备一定的应用性。
DPM作为一种新兴技术,它的潜力还在不断被挖掘,也有很多技术难题需要解决,比如海量大文件的存储;在移动过程中如何获得清晰度非常高的图像;超高分辨率视频的网络带宽问题。
[1]CH/Z 1002-2009.可量测实景影像[S].
[2]GB/T 12979-2008.近景摄影测量规范[S].
[3]魏红芹,于德弘.基于立体视觉的坐标网格分析法[J].塑性工程学报,2002(2):54~59
[4]李智,周文晖,刘济林.动态场景下基于视差空间的立体视觉里程计[J].浙江大学学报,2008(10):1662~1664
[5]李海亭,张淼,彭清山.城市地理信息系统中的全景地图技术研究[J].城市勘测,2011(3):39~43
