基于ARM和DSP的微机线路保护装置
2012-06-28张小伟
张小伟
(船舶重工集团公司723所,扬州225001)
0 引 言
随着微机保护系统向多功能及网络化方向的发展,通常系统采用的单片机、DSP这些处理器已经不能完全满足需求。因此,在设计新的微机保护装置时,有必要选用高性能、低成本的微处理器。本文提出以ARM9微处理器S3C2410为核心控制器,并结合DSP组成双CPU架构模式设计了针对35kV及以下的微机线路保护装置,提供三段式电流和电压方向保护、小电流接地选线、三相一次重合闸、过负荷、后加速、零序过电流等保护功能,并且该装置采用以太网通信的机制和上位机进行通信[1]。
1 设计方案的确定
目前,国内市场上的线路保护装置也层出不穷,研究开发部门以及生产厂商很多,线路保护的CPU一般采用单片机,网络拓扑采用总线型结构,这样的缺点是与节点相连的通信电缆一旦发生故障则保护装置可能失去作用。而基于DSP的线路保护装置的优点是设计简单,数据采集与处理速度较快,实时性高,同时具有很高的性价比;但缺点是与站级通信也采用DSP处理器,使用RS-485、控制器局部网(CAN)总线方式,这就不适应变电站自动化系统设计中过程层与间隔层、间隔层与变电站层间的通信方式——标准以太网方式。
随着计算机技术的快速发展,线路保护装置也不断地向嵌入式计算机系统方向发展,这对线路保护装置整套硬件的小型化、一体化、高指标、高性能化提供了很大的扩展空间。本文在参考了典型的线路保护测试装置后,提出了一种基于DSP和嵌入式系统的双CPU的线路保护装置的设计方法,使得该保护装置性能指标优化、通信高速稳定、交互界面友好直观、功能更加强大、升级更加方便。
该线路保护装置以ARM9作为上位机核心硬件平台,以TI公司DSP TMS320F2812为下位机核心通信控制器,ARM处理器作为主CPU用于与变电站级的通信,DSP则主要负责数据的采集、计算、逻辑判断,有效地保证了线路保护的可靠性、选择性及速动性,并在故障发生时进行滤波,记录故障数据以供分析,两者通过双口RAM进行数据交换和信息传输,配合完成线路保护的任务。软件部分则基于Linux操作系统,完成Linux系统及应用程序的移植。
2 线路保护硬件的设计
根据前面所确定的设计方案,保护装置的硬件构架就是DSP+ARM的双CPU结构,DSP处理器则是利用自身运算速度快、擅长数字信号处理的优点进行数据采集、计算、逻辑判断,ARM处理器作为主CPU用于与主站级的通信。
装置的总体结构电路除了ARM、DSP微处理器外还有一些外围模块,硬件结构如图1所示。
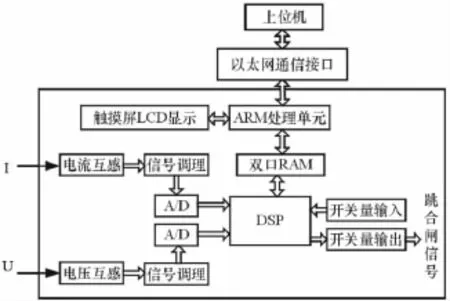
图1 装置的硬件结构
经过电压、电流互感器变换后产生的电压、电流信号进行二次电压互感器(PT)和电流互感器(CT)变换,即将100V、5A的二次电压、电流信号转换成+5V~-5V的弱电信号,并进行信号调理,然后进行模数转换(A/D),在DSP内完成各种数值运算,并把结果送入ARM处理单元,确定待保护系统的运行状态,通过带有触摸屏功能的液晶显示器(LCD)进行人机交互,并通过以太网通信接口连接到远程上位机,可对该保护装置进行远程监控。如判断有故障,DSP发出跳闸动作信号,驱动外部保护器件断开电路以保护系统。
2.1 DSP部分硬件设计
DSP部分主要完成对状态量、模拟量、脉冲量等变电站内数据的采集、调理、A/D转换、分析计算以及各种保护算法的实现,逻辑判断输出和故障时滤波等功能。
2.1.1 信号调理电路
这里的调理是针对诸如线路电压、电流等遥测模拟信号,将CT、PT二次测得的大电压、大电流转换成0~5V的电压送到A/D模块。
2.1.2 A/D模块
本装置采用14位的A/D模块MAX125,启动转换端接2812的定时器比较输出,每隔采样点时间输出下降沿启动A/D。MAX125转换结束会产生中断,2812则在中断程序中读取转换结果。当采集一个周期后进行N=128点的快速傅里叶变换(FFT)计算。
2.1.3 光电隔离模块
为了有效地抑制系统噪声,消除接地回路的干扰,本装置在开关量输入时使用光电隔离电路,把驱动电路和控制电路之间驱动信号和控制信号隔离,实现不同电压之间的信号传输。为了给DSP应用程序运行时留有更多的空间,装置还外扩了一块RAM以保存临时数据。
2.2 ARM部分硬件设计
ARM部分主要完成与牵引变电站的通信、键盘按键处理、系统时钟基准、液晶显示及部分数值的初始化整定等功能[2]。
2.2.1 RS-232串行模块
目前RS-232是PC机与通信工业中应用最广泛的一种串行接口。RS-232被定义为一种在低速率串行通信中增加通信距离的单端标准。系统需要通过该串口下载程序或者进行串行通信。系统中采用RS-232的电平转换芯片MAX232实现串口的通信。在这里RS-232接口主要是用于初始化整定数值的设定和系统维护的人机接口。
2.2.2 液晶显示(LCD)模块
LCD模块选用 MG-12232-5,液晶控制器组成的逻辑转换液晶图像数据从一个位于系统内存的视频缓冲器到外部LCD驱动器。液晶控制器支持单色,采用2位每像素(4级灰度)或4位每像素模式的单色液晶显示屏,使用基于时间的抖动算法和帧速率控制方法,它可以连接带有彩色液晶显示屏上的8位每像素和12位每像素接口与液晶显示器。该LCD控制器可以编程,以支持不同的要求(屏幕上的横向和纵向像素,数据线宽度的数据接口,接口时间和刷新率)。
2.2.3 DSP与 ARM 的通信
在同一个线路保护系统中,DSP与ARM需要进行高速数据交换和信息传输。为了确保ARM能够实时显示各种信息,DSP必须定时将采集到的电流值、电压值和时间信息传送给ARM;ARM必须及时地将用户通过键盘设置的信息传给DSP,使DSP可以用做计算和判断。而这些功能通过双口RAM这样一种性能优越的快速通信器件来实现[3]。
在本设计中,采用美国IDT公司开发的高速256kb的高速静态双口RAM IDT70261PF。它可允许2个端口同时进行高速读写数据,每个端口具有自己独立的控制信号线、地址线和数据线,可高速存取数据,最快存取时间为15ns,可与大多数高速处理器配合使用,而无需插入等待状态。IDT70261PF除具有双端口存取功能外,还具有标识器功能,在数据传送时可构成多种接口形式。
2.2.4 其他模块电路
小键盘电路主要由ARM的I/O口、八相反相缓冲器74LS240、锁存器74LS273以及一些上拉电阻组成,采用DS12887芯片构成外部时钟电路。边界扫描技术(JTAG)仿真器也称为JTAG调试器,是通过ARM芯片上的JTAG边界扫描口进行调试的设备,JTAG接口主要是在系统程序调试时进行在线实时仿真。
3 软件部分设计
3.1 ARM软件结构
ARM部分软件结构如图2所示,由嵌入式操作系统Linux、网络协议驱动和应用程序组成。Linux具有性能稳定、良好的移植性、对各种文件系统广泛支持以及标准丰富的应用程序接口(API)等。应用程序直接在Linux上编写,主要包括3个部分:以太网通信程序、双口RAM读写程序和按键处理程序。硬件初始化就在Linux启动中完成,但读系统时钟则作为操作系统的一个线程运行[4]。
3.2 DSP软件结构
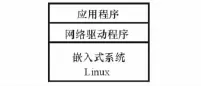
图2 ARM部分软件结构
DSP部分软件结构如图3所示,主要包括DSP硬件初始化、软件遥测(YC)采样、测频、谐波快速傅里叶变换(FFT)分析、保护算法以及遥控(YK)输出等,主要完成数据采集、馈线保护逻辑判断及故障数据记录等功能。
本装置保护软件充分利用DSP强大的中断功能实现数据实时处理。程序启动时先写入定时采样时间,工频时为0.02s,然后通过软件进行测频实现跟踪频率的变化。
利用同步采样消除频域中栅栏效应,加汉宁窗来减少能量泄漏,每周期采样128点进行FFT变换足以算出电力系统中高次谐波。启动元件采用相电流差突变量方式,只有在装置连续采样32点以上才允许保护装置输出动作信号。
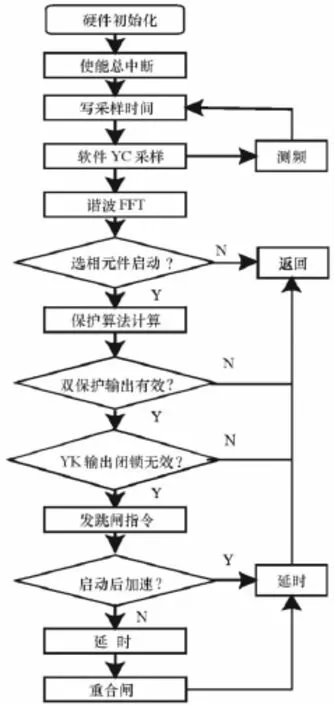
图3 DSP部分软件设计框图
本牵引变电所所采用的保护方式包括电流保护和距离保护,电流保护为电流速断、限时电流速断和过电流保护的三段式电流保护。
按照饱和磁通为1.4倍的额定磁通幅值时合闸电流的大小,采用15%的制动比整定值来躲开励磁涌流,而阻抗元件为了有较好地躲过系统振荡能力和提高允许过渡电阻的能力,装置采用带偏移特性的多边形方向阻抗特性,充分考虑了过渡电阻以及由其引起的附加测量阻抗。
当双保护输出有效即判断有馈线故障时,延时返回后记录故障前10个周波的数据的有效值,并逐次录下故障后的10个周波的数据。本装置采用改进的傅里叶算法为馈线保护的采样算法,采用Matlab仿真的故障电流波形如图4所示。
装置采用电流、距离双保护,以距离保护为主保护,以电流保护作为辅保护和后备保护,保护电气化铁路牵引变电所馈线的整个线路。
4 结束语
由实验知,ARM9微处理器S3C2410与DSP构成的双CPU模式微机线路保护装置充分发挥了嵌入式ARM处理器强大的网络通信功能和DSP的高效数字信号处理能力,不仅能达到微机保护可靠性、选择性、灵敏性和速动性的基本要求,而且硬件平台具有运行速度快、功耗低、人机界面友好、通信接口多等优点,完全可以替代以往单CPU构成的微机线路保护装置。

图4 故障电流仿真波形
[1]于群,曹娜.电力系统微机继电保护[M].北京:机械工业出版社,2008.
[2]孙天泽,袁文菊,张海峰.嵌入式设计及Linux驱动开发指南——基于ARM9处理器[M].北京:电子工业出版社,2005.
[3]刘斌,李仲阳.ARM/DSP双核系统的通信接口设计[J].单片机与嵌入式系统应用,2005,53(5):22-24.
[4]吴明晖,徐睿,黄健.基于ARM的嵌入式系统开发与应用[M].北京:人民邮电出版社,2004.