矿井提升机电气控制方法
2012-06-26武钰
武钰
(潞安新疆煤化工(集团)有限公司,新疆 哈密 839003)
1 引言
煤矿提升机是煤矿的关键设备之一,其作用是提升煤炭、升降人员和设备、提升矸石、下放物料等,在整个煤矿生产中占有十分重要的地位。煤矿提升机安全、可靠、高效、准确的运行集中体现在提升机的电气控制部分,其电控系统的性能优劣直接影响煤矿生产及人身安全。
矿井提升机制动经历了交流-直流-交流发展过程,电控系统则经历了继电器-接触器控制、分立元件构成的电子式控制,再到PLC或计算机的数字控制模式变化。

图1 提升速度五阶段图
2 提升机运行速度
提升速度一般设计为五阶段。如图1所示。各运行阶段参数为:最大运行速度Vmax,加速度a,爬行速度Vcreep,以及爬行距离。
3 绕线式异步电动机转子切电阻调速控制
由于交流电机具有结构简单、紧凑坚固、容量大、价格低、应用场合广泛和能直接使用交流三相电源等特点,目前我国中小型煤矿提升机大量使用绕线式异步电动机转子切电阻调速控制系统。
为了使提升机在低速时也能得到稳定运行区域,同时加大启动转矩和减小启动电流,必须在电动机转子串适当的电阻,以获得较好的启动特性。
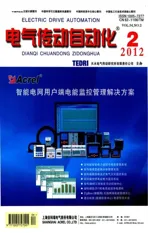
绕线式异步电动机转子串电阻调速控制主电路如图2所示,转子共串有八级起动电阻。
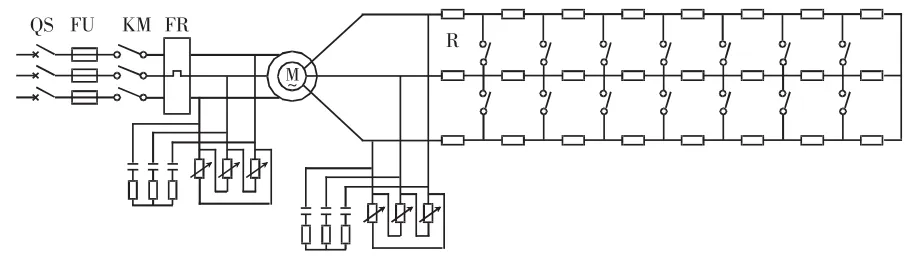
图2 绕线式异步电动机转子切电阻调速控制主电路
在启动时转子绕组中接入八组电阻,随着电动机转速的不断增加,起动电阻被逐级短接,至电动机启动完毕,电阻全部短接切除,完成电动机的启动过程和调速。但由于其调速为有级调速,在低速异步状态没有制动力矩,而提升工艺要求控制系统在低速爬行阶段能够工作在制动状态(下放重物)或电动状态(提升重物),到达井口时必须减速。故该控制方法可以选用动力制动、低频制动进行减速和准确停车。
3.1 动力制动
当电动机转子旋转时,切断定子交流电输入直流电,转子绕组则接到外电阻上,此时不动的定子磁场与转子电流相互作用产生制动力矩,电动机被制动,这种制动叫动力制动。
当减速阶段提升机负力较大,特别是下放重物时,需要制动力来维持稳定的下放速度和减速度,此时可以采用动力制动方式工作。图3所示为绕线式异步电动机动力制动。
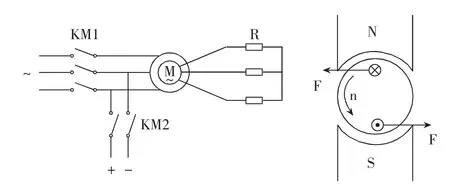
图3 绕线式异步电动机动力制动
3.2 低频制动
动力制动力矩随着速度的降低而减小,因此不能用动力制动停车,必须采用低频爬行方式停车。低频制动分为低频发电制动和低压变频器制动两种方式。
当采用低频发电制动减速时,减速开始应将主电机从50Hz的工频电源上断开,将其接入2.5~5Hz的三相低频电源。此时电动机的同步转速降低为n0=60f/p。此时提升机的速度大于电机的低频同步转速,故提升机以低频发电方式运行,电动机产生制动力矩。适当调节低频电压和转子回路的电阻,即可以得到不同的低频特性曲线,如图4所示。
图4 提升机电动机的特性曲线
低频发电机虽然可以较好地解决制动和爬行问题。但其整个控制系统较复杂,使用的设备也比较多,给系统的维护和检修带来了一定的不便。因此可以考虑用低压变频器模拟低频发电机实现低频制动。
通用变频器输出的电压与频率在V/F控制方式下基本为线性关系,无法用690V低压变频器控制6000V或10000V电动机。VACON NXP系列矢量变频器可以实现对控制程序进行编程,改变变频器输出电压与频率的线性关系,实现对电压与频率的分别控制,从而达到控制制动力和低频电机的目的。
VACON变频器低频制动工作方式电气接线图如图5所示。
低频制动程序控制系统的控制器通过PLC根据主令信号启动电动机,进行转子电阻的投切,切换到变频器低频制动的状态并给出变频器的工作方式,完成提升机的工作控制和安全保护。如表1所示为变频器工作方式。
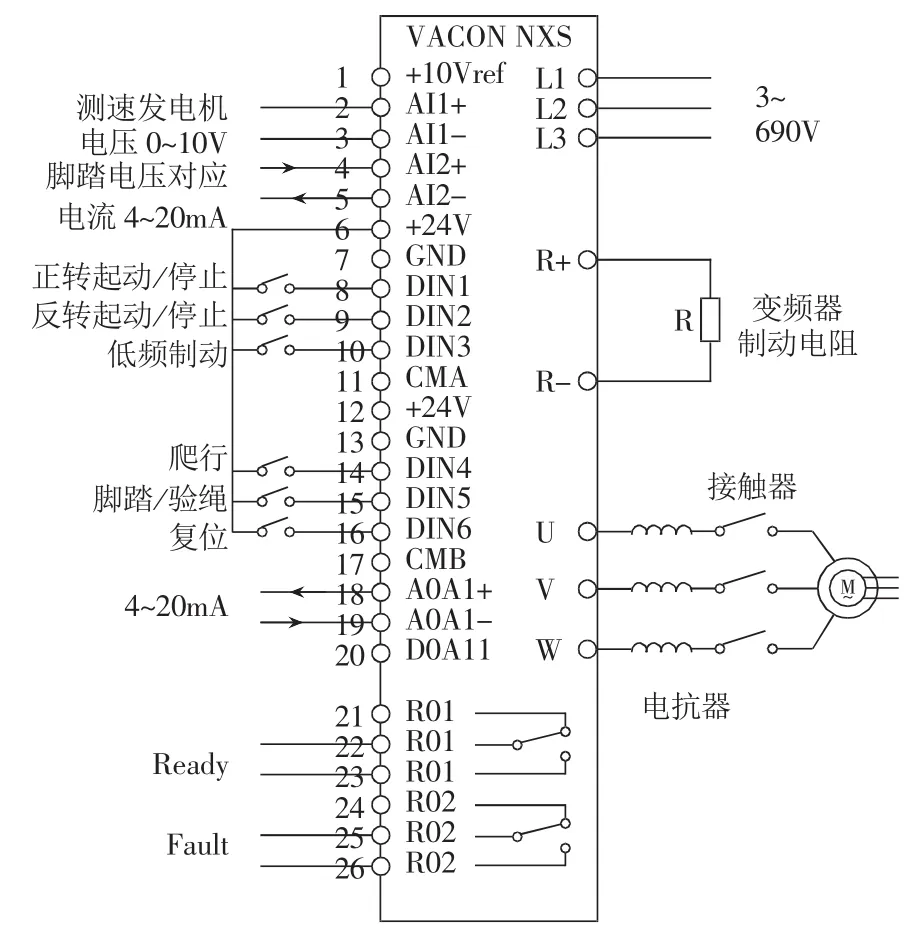
图5 变频器连接图

表1 变频器工作方式
低频制动程序控制采用内置于变频器的模糊PID控制算法。模糊PID控制器由参数可调整PID控制器和模糊推理机两部分组成,其控制原理框图如图6所示。

图6 内置于变频器的模糊PID控制器系统框图
提升机的主电机的速度n与给定速度曲线ng的差值作为偏差e。偏差e和偏差变化率ec作为模糊推理机的输入量,根据模糊控制原理对PID参数进行修改,控制变频器输出电压以达到控制转矩的目的。低频制动开始时电机的速度先产生一个低频制动速度曲线作为模糊PID控制器的给定ng,通过模糊PID控制器控制变频器输出电压U和输出频率f,达到控制高压电机的速度n,从而实现低频制动控制。
当电机功率超过1000kW时,可以采用两台绕线式异步电动机并轴制动,即双机制动。
4 直流电动机调速系统
由于绕线式异步电动机转子串电阻调速系统为有级调速,调速性能较差,很难适应调速性能要求较高的场合。随着矿井生产规模的扩大,特别是对于井深达到600m以上的井,要求提升速度快、提升容量大且效率高的矿井,绕线式异步电动机转子切电阻调速控制已不能满足要求,因此直流调速系统应运而生。
直流调速系统一般采用直流电动机作为主要制动电机,具有调速性能好,低速阶段能够稳定运行,在加速、减速和低速运行时的耗电小,容易实现自动化控制的特点。
早期为发电机-电动机(G-M系统)供电的直流传动系统。到20世纪70年代开始采用晶闸管-电动机(V-M系统)直流调速系统,这期间主要为模拟控制和数模混合控制方式。直流传动提升机控制技术经过十多年的发展,到20世纪90年代初基本实现了从模拟控制技术到全数字控制技术的转化。
如图7所示,典型的G-M系统包括主回路、调速系统和给定部分。提升机T由直流主电动机ZD拖动,直流主电动机ZD由直流主发电机ZF独立供电。直流主发电机ZF由同步电机TD拖动,组成变流机组。直流主电动机励磁绕组ZD-LQ由单独的电动机励磁绕组供电。直流主发电机励磁绕组ZF-LQ由电机放大机JF供电。YD为异步电动机,直流主回路由直流主开关ZK开闭。
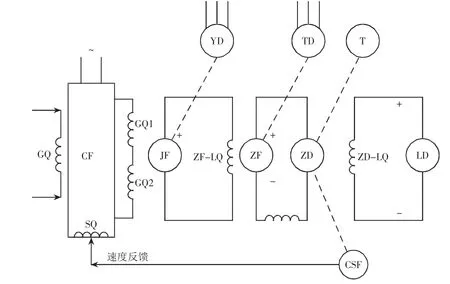
图7 典型的G-M系统
系统采用励磁放大器-电机放大机二级放大的速度闭环调试系统,给定信号加到励磁放大器CF的给定绕组GQ,经放大后供给电机放大机JF的给定绕组GQ1、GQ2,经再次放大后供给直流主发电机励磁绕组ZF-LQ。通过提升机T硬连接的测速发电机CSF获得速度反馈信号,加到励磁放大器速度反馈绕组SQ,构成速度负反馈环节。
晶闸管-电动机(V-M系统)直流调速系统,如图8所示,通过调节晶闸管的导通角α控制直流电压Ud。
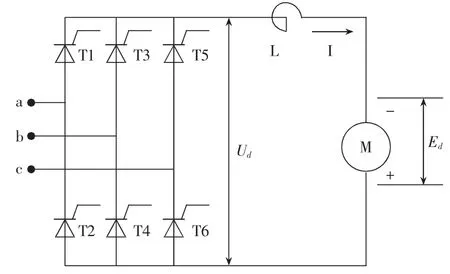
图8 三相桥式全控整流电路原理
可逆拖动系统采用电枢反并联电路,如图9所示,两组整流桥(1组2组)反并联。
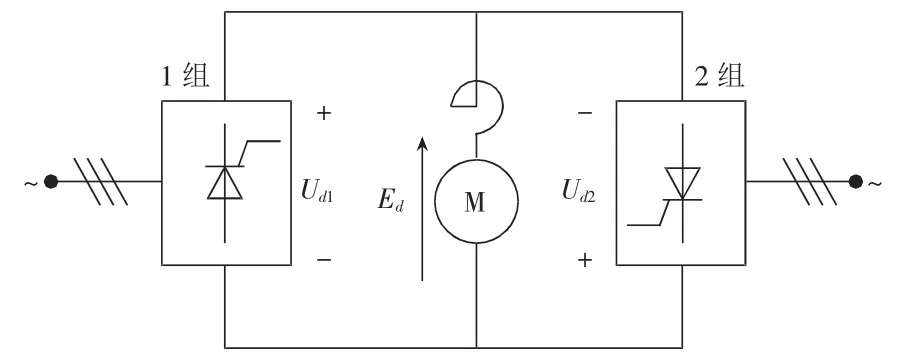
图9 电枢反并联电路
5 交流异步电机变频控制调速系统
变频调速是近年来发展起来的一门新兴的自动控制技术,它利用改变被控对象的电源频率,成功实现了交流电动机大范围的无级平滑调速,在运行过程中能随时根据电动机的负载情况,使电机始终处于最佳运行状态,在整个调速范围内有很高的效率,节能效果明显。采用变频器对异步电动机进行调速控制,由于使用方便、可靠性高并且经济效益显著,得到广泛应用。变频控制系统具有以下优点。
(1)变频系统甩掉了原电控调速用的交流接触器及调速电阻,提高了系统的可靠性,改善了操作人员的工作环境,使噪音及室温降低了很多。
(2)调速连续方便,分段预置,能连续平滑调节。
(3)实现了低频低压的软启动和软停止,使运行更加平稳,机械冲击小。
(4)启动及加速过程冲击电流小,加速过程中最大启动电流不超过额定电流的1.5倍,提升机在重载下从低速平稳无级平滑地升至最高速,也没有大电流出现,大大减小了对电网的冲击。
(5)增加了直流制动功能,使重车停车时更加平稳,有效避免了“溜沟”现象。
(6)采用能耗制动、回馈制动或超级电容吸收技术,成功解决了位能负载在快速、减速或急停时的再生发电能量处理问题,保证了变频器的安全运行。
(7)转矩补偿达到规范要求,重车启动正常。
(8)节能效果显著。据实测,在低速段节能明显,一般可达到30%左右。矿井越浅,低速段运行时间越长,节能效果越明显。
(9)采用变频控制后,原绕线式电机可改为普通电机,这不但降低了成本,普通电机比绕线式电机可节约投资l/3,而且避免了转子碳片的烧损及维护。
矿井提升机变频调速方案如图10所示。
通用变频器大多采用交-直-交的变频控制方式,交-直回路又通常采用不可控整流桥,不能使电流反向,因此要实现回馈制动和四象限运动就比较困难。对于负载处于发电制动状态中,必须采取措施处理这部分再生电能。主要有两种方法,即能耗制动和回馈制动。能耗制动采用的工作方法是在变频器直流侧加放电电阻单元组件,将再生电能消耗在功率电阻上来实现制动。如图11所示。
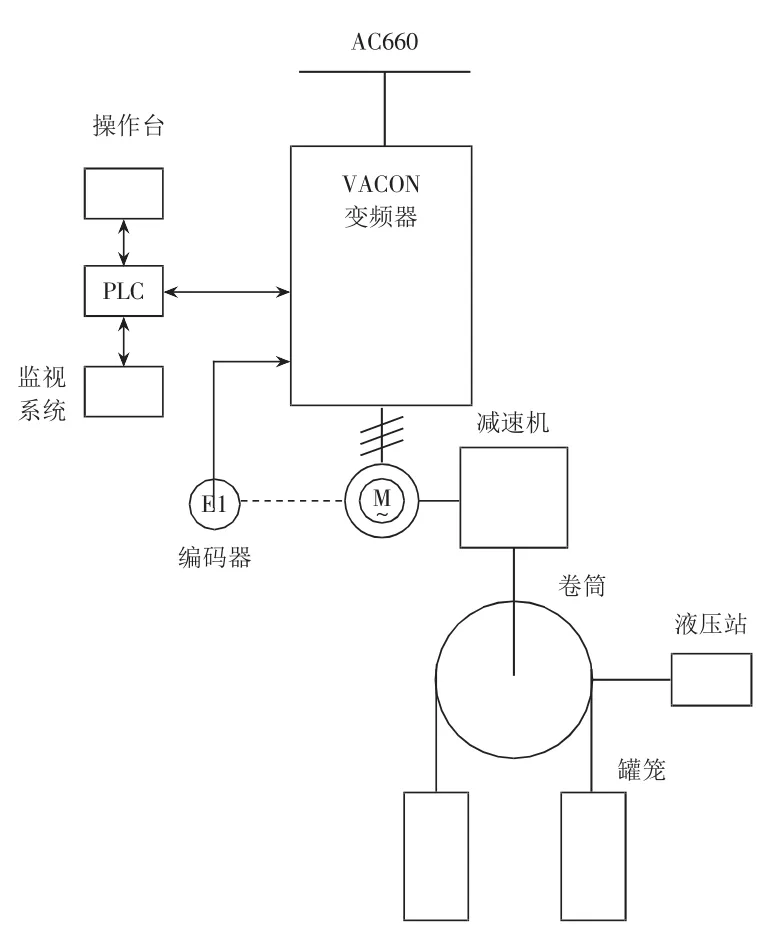
图10 矿井提升机变频调速方案
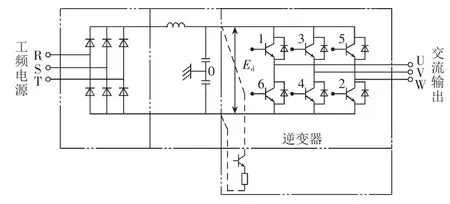
图11 变频器能耗制动方式
对于频繁启动、制动的四象限运动电机而言,其发电状态下将产生大量能量,如果全部消耗在电阻上,将浪费大量能源。为解决这一问题,采用再生能量回馈系统将制动产生的能量回馈到交流电网,实现了从电机到直流母线、再从直流母线到交流电网的能量回馈过程,这种方式叫回馈制动方式。要实现直流回路与电源间的双向能量传递,一种最有效的方法就是采用有源逆变技术AFE,即将再生电能逆变为与电网同频率同相位的交流电回送电网,从而实现制动。图12所示为回馈电网制动原理图,它采用了电流追踪型PWM整流器,直流电压的控制采用比例积分(PI)控制。
图13所示为VACON AFE能量回馈电网变频器波形图。AFE(Active Front End)是有源前端整流系统,将交流电压电流转化为直流电压电流。AFE可以将电网电能转化传送到直流回路;AFE再生发电时,也可以将电能从直流回路传送回电网。使用AFE,电网的电流谐波THDI含量很低,无需增加外部滤波。AFE系统包括逆变模块、LCL滤波器和预充电回路。应用如含有以下要求,AFE就是正确的选择,即:再生制动THDI要求<5%,功率因数接近1,电机电压略高于供电电压,整流单元要求冗余,整流单元需要直接与发电机相连,不增加中间变压器,VACON AFE单元可以独立并联,并联模块之间没有任何关联。

图12 回馈电网制动原理图

图13 VACON AFE能量回馈电网变频器波形图
6 交流同步电机变频控制调速系统
永磁式同步电动机结构简单、体积小、重量轻、损耗小、效率高,和直流电机相比,它没有直流电机的换向器和电刷等缺点。和异步电动机相比,它由于不需要无功励磁电流,因而效率高,功率因数高,力矩惯量比大,定子电流和定子电阻损耗减小,且转子参数可测、控制性能好;但它与异步电机相比,也有成本高、启动困难等缺点。和普通同步电动机相比,它省去了励磁装置,简化了结构,提高了效率。永磁同步电机矢量控制系统能够实现高精度、高动态性能、大范围的调速或定位控制,因此永磁同步电机在矿井提升机上正成为应用热点。交流永磁同步电机正向大功率化(高转速、高转矩)、高功能化和微型化方面发展。目前,稀土永磁电机的单台容量已超过1500kW,最高转速已超过 300000r/min,最低转速低于 0.01r/min。
用VACON AFE四象限变频器控制多绕组直联提升机框图如图14所示。
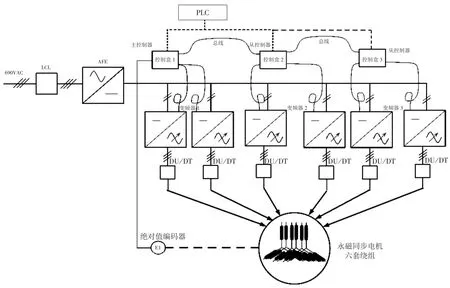
图14 VACON AFE四象限变频器驱动六绕组永磁同步电机框图
电机技术数据:永磁同步电机一台:1300kW,660V,六套独立绕组,每套功率220kW,每套绕组的电压频率相位角为0度。基频50Hz,电机共120极。应用于矿井提升机。
变频器系统冗余设计:采用三台500kW 690V变频器控制,有六个变频器模块,三台变频器之间采用相位同步控制程序,六个变频器模块输出频率相同且相位角相同,具有冗余功能,即不需要1300kW时,可以减少一台或两台变频器工作。直流母线上的电容具有存储能量功能。
采用两台AFE模块,能量可以回馈电网,节省能源,当不需要1300kW时,或其中一台AFE不能工作时,另一台可以独立工作,具有冗余功能。
变频器控制系统:系统控制器采用PLC S7-300,触摸屏。变频器采用绝对值编码器闭环控制。
公共直流母线产品INU逆变器软件采用同步控制软件Line Sync Application。该软件可以使三台变频器输出同相的交流电压。
变频器系统包括AFE回馈整流单元:NXA 1030 6 G 0 T 0 2 S G A1 A2 D2,一台;NXA 0325 6 G 0 T 0 2 S G A1 A2 D2,一台;逆变器INU选型 :NXI05906G0T0ISG A1A2D2AK FI12 500KW,三台。
7 结束语
以上介绍的几种矿井提升机的制动方式及技术革新历程,对于掌握和运用现有技术,开拓创新新的技术领域,发明创造出更低能耗、更高效率的产品、设备,从而更好地服务于矿山、服务于社会,奠定了坚实的基础。
[1]马建民.现代提升机数字控制系统[M].江苏:中国矿业大学出版社2002.
[2]顾永辉.煤矿电工手册(修订本)第三分册:煤矿固定设备电力拖动[M].北京:煤炭工业出版社.1999.
[3]李晋卫.浅论矿用提升机变频调速控制[J].科技情报开发与经济,2006.
[4]吴 鸣.绕线式异步电动机起动电路的改进[J].机床电器,2003.
[5]卢 燕.矿井提升机电力拖动与控制[M].北京:冶金工业出版社,2001.