基于字符连通域特征的车牌定位方法
2012-06-25张金林胡宏健方虎生
张金林,胡宏健,方虎生,孙 磊
(中国人民解放军理工大学工程兵工程学院,江苏 南京 210007)
近年来,中国汽车工业的飞速发展给交通管理系统带来了前所未有的难题,而其中应运而生的智能交通系统又是以车牌识别为基础。因此,车牌识别算法及实现领域都有大量的研究,形成了以车牌定位、字符分割、字符识别为主流程的传统识别算法,但是仍然存在实时性差、适应性不强、可移植性差等问题。其中车牌定位技术是整个识别系统的关键,目前的定位方法主要有基于颜色空间的定位方法[1-3]、基于边缘特征的定位方法[4-5]、基于数学形态学的定位方法[6]。基于颜色空间的定位方法定位速度快,但受光照、环境条件等影响,在黑夜或车牌污浊的情况下识别率低;基于边缘特征的定位方法适应性强,但运算复杂、速度低,且受车牌以外字符如车型号码、涂鸦文字等影响,可能出现严重的识别错误,基于形态学的定位方法计算量大,只能实现粗定位,同样受车牌以外文字的影响较大。本文针对以上方法的不同缺点,提出了强调硬件系统构架,固定部分车牌图像输入环境,引入大量车牌先验知识,并最终利用车牌字符连通域显著特征的车牌定位算法。该方法以灰度图像或者二值图像为出发点,具有较好的适应性,同时巧妙地避免了对整幅车牌图像重复逐行、逐列的扫描,简化了识别流程,从而提高了实用性。
1 车牌识别算法特点
1.1 车牌先验知识引入
人类的视觉系统对边缘、颜色具有很强的敏感性,而且在先验知识的引导下才使得人眼的识别准确而且快速[7],本文充分对国内的车牌标准进行分析,并运用到算法当中。
通过实际的硬件实验环境搭建,算法可利用以下几点先验知识:1)现实的周边环境虽然不一致,但整个系统的相对位置固定,例如摄像装置与路面的高度,所以车牌图像的大小以及车牌字符所占图像的位置可以大致确定(一定程度上增加扫描的效率);2)车牌字符基本为横向排列,偏转的角度不大,约0°~10°,因此横向的扫描是可行的;3)每个字符的宽高比大约为2∶1,而且互相靠近,一共是7个类似连通域;4)整个车牌长宽比在60∶31~22∶7范围内;5)在整个汽车车牌图像中,车牌号码的边缘特征显著,而车牌字符附近边缘变化较为稳定,没有类似于车牌字符连通域变化剧烈的区域。
1.2 本文车牌识别算法特点
车牌识别系统是典型的机器视觉与模式识别问题,它们不仅具有共同的难点与解决方案,而且车牌系统由于受实际环境(例如光照、旋转、分辨力等问题)的影响,导致输入图像数据相对复杂,影响着整个系统的稳健性。本文也在其中的一些问题上作了大量的研究,并在算法上也作了修正:
1)车牌图像通常是在复杂背景环境下取得的,摄像机的晃动、汽车的位置变化使车牌在图像的位置变化太大。本文从硬件上设计了铺设于道路中的传感器,在一定程度上解决了相对位置问题。
2)车牌图像光照以及车牌颜色的不确定同样给定位带来一定的限制。本文利用的字符连通域是在灰度图像的情况下进行的,一定程度的归一化避免了光照等条件的差异性。
3)车牌图像数据庞大,系统实时性能的考验是算法优劣的基础。本文选用的算法一次扫描即可,避免重复扫描,大大节约了时间。
2 算法实现步骤
2.1 图像预处理
车牌图像的获取由于受诸多条件的影响,使例如颜色等大量数据信息不能一致,因此,在定位前需要对图像进行预处理,将可靠性及稳定性高的信息筛选出来,本文认为对于车牌定位图像的有用信息在于字符边缘特征明显,连通域在一定范围(与标准化后的图像大小成正比),同时将图像大小统一,有利于定位的准确性与适应性。
本文采用反差增强算法进行字符的灰度调整,即利用直方图统计其灰度分布,从而自适应地取得阈值,对不同范围内的灰度进行拉伸,公式为
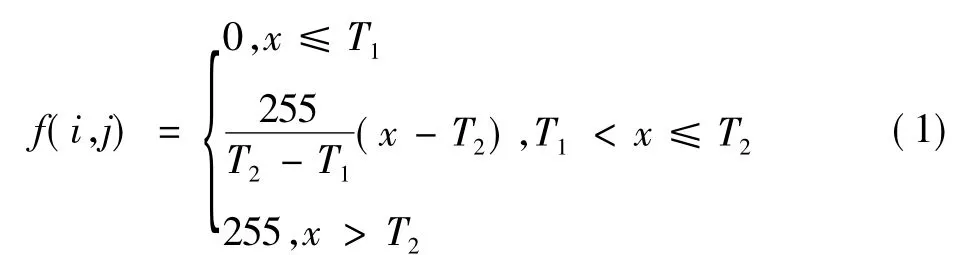
式中:x为图像点(i,j)的灰度值,f(i,j)为拉伸后得到的灰度值。对于大小归一化,为了尽可能防止图像失真,采用双线性插值法把图像归一化到600×600的大小。图像预处理结果如图1所示。

图1 图像预处理结果
2.2 字符连通域特征提取
二值图像连通区域标记可以将二值图像中的不同物体(连通区域)区分开来,为下一步进行特征提取作准备,属于不同物体的像素将被赋予不同的类别号,属于同一物体的像素被赋予相同的类别号。
文献[8]中提出标准的中国车牌字符具有高度相等、水平排列的特点,基于此,本文设计出阈值分割的分类器,实现定位的功能。
连通性的定义,在1个连通集中任意2个像素之间都存在1条完全由这个集合中的元素构成的路径,用公式表示即2个前景像素P和Q是连通的当且仅当存在1条路径 P1—P2—P3…Pn,使得P1=P ,Pn=Q,对于∀i,1≤i≤n -1 有Pi与Pi+1相邻,其中 P1,P2,…,Pn都是前景像素。有2种可供选择的连通性准则:
1)当2个像素点P1(x1,y1)和P2(x2,y2)满足以下条件

则定义P1和P2是八相邻的,在这种情况下,1个像素有8个相邻像素点;
2)当2个像素点P1(x1,y1)和P2(x2,y2)满足以下条件

则定义P1和P2是四相邻的,在这种情况下,1个像素有4个相邻像素点。
本文采用类似于人类视觉系统的八邻域方法,并采用张云哲[9]等提出的基于非对称行程和轮廓跟踪的连通区域标记算法(RCL算法)。RCL算法采用轮廓跟踪技术以行程为单位标记二值图像。
2.3 本文算法流程图
如图2所示,本算法步骤为:1)对车牌图像进行去嗓、二值化、统一大小等预处理操作;2)对整幅图像进行连通域标记;3)按照车牌字符连通域特征,排除大量伪车牌区域;4)通过车牌区域跳变最多,车牌字符及长度的比例进行车牌的精度定位。
3 实验与分析
3.1 实验环境及测试集
车牌识别系统的开发需要一定的硬件基础,本实验环境在PC环境下,CPU为Intel(R)Pentium(R)Dual E2200@2.10 GHz 2.22 GHz,内存为 2.0 Gbyte,编程及调试环境为Matlab。本文目的在于提高车牌定位的效率,以及一定的现实应用意义。为了论证方法的优越性,在实验的过程中以100张车牌图像为数据,分别包含了车牌状况良好,受一定程度污染或破损等情况,与基于颜色的车牌定位方法进行了比较,本文方法车牌定位率在98%左右。
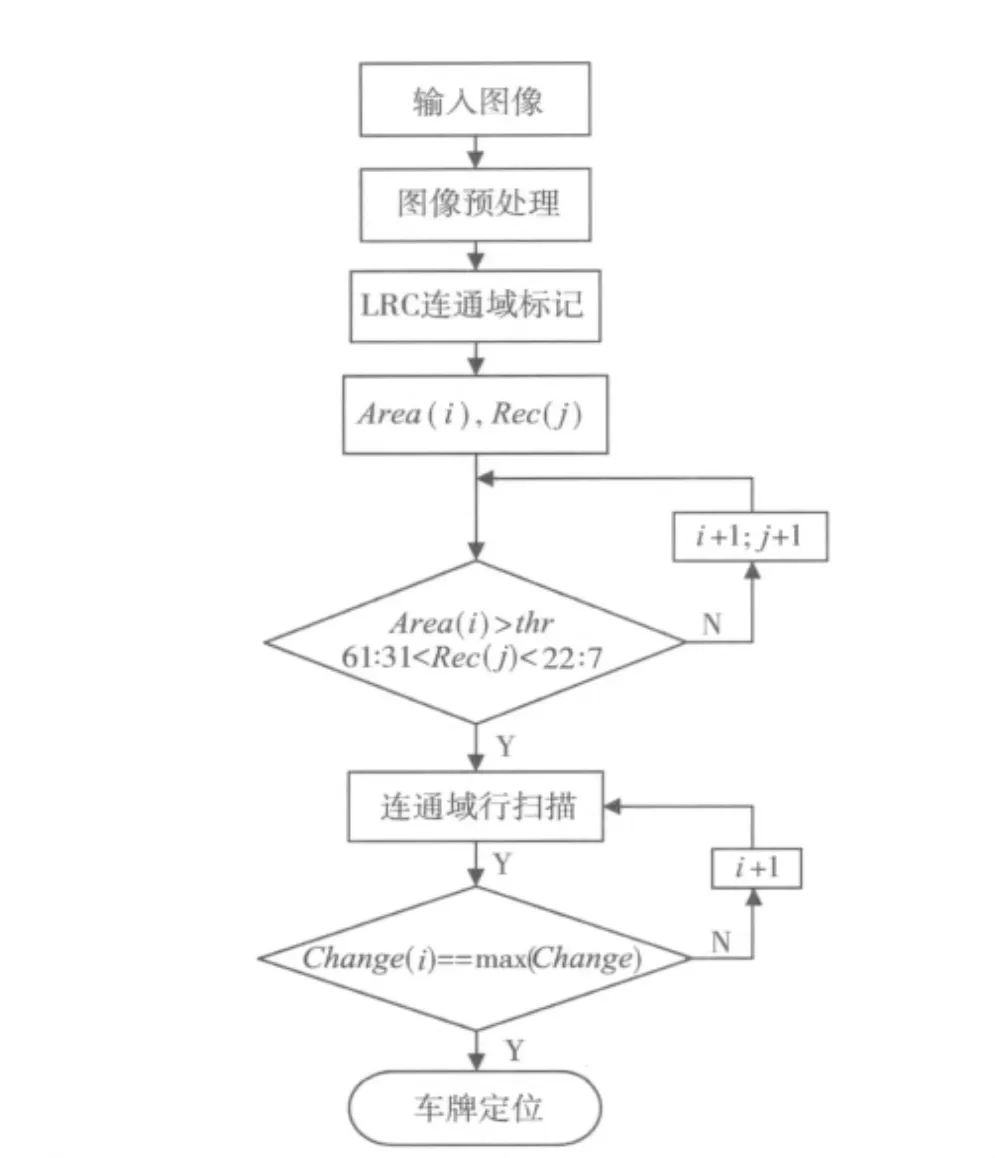
图2 算法流程图
3.2 实验结果及分析
本文算法定位过程如图3所示。

图3 本文算法实现过程
由图3所示,本文定位步骤简单,效果明显。特别的,在如图4中显示了基于颜色与边缘特征定位算法,对样本一的定位中效果明显,但对于样本二车牌受严重污染的情况,基于颜色的车牌定位算法不能应用,而此类现象现实中较常见,因此基于颜色的定位方法实用性较差,从而证明本文算法有优越的适应性。同时,本文算法定位的车牌区域字符特征明显,利于下一步字符识别过程,简化了整个识别系统的步骤。

图4 基于颜色特征定位算法
4 结论
本文提出了将硬件构架以及先验知识引入车牌识别算法中,大大减少了盲目扫描识别的运算量,基于字符连通域显著特征的车牌图像定位方法也具有良好的定位能力以及对各种环境下的适应能力。根据从交通部门采集到的100组图像数据进行反复试验表明,该方法对光照不均、车牌受污染、背景复杂的情况均有有效的处理结果,体现了算法的实用价值。下一步将继续提高本文算法的通用性和实时性,以及基于本文结果的车牌识别算法系统研究。
[1]刘万军,姜庆玲,张闯.基于CNN彩色图像边缘检测的车牌定位方法[J]. 自动化学报,2009,35(12):1504-1512.
[2]周小龙,张小洪,冯欣.基于视觉显著图的车牌定位算法[J].光电工程,2009,36(11):145-150.
[3]刘晓芳,程丹松,刘家锋,等.采用改进 HSI模型的车牌区域检测和定位方法[J]. 哈尔滨工业大学学报,2008,40(1):85-89.
[4]吴舟舟,李树广.基于分级边缘间距的实时车牌检测[J].中国图象图形学报,2007,12(2):315-321.
[5]路小波,张光华.基于二值图像的车牌精确位方法[J].东南大学学报:自然科学版,2005,35(6):972-974.
[6]李刚,曾锐利,林凌,等.基于数学形态学的车牌定位算法[J].仪器仪表学报,2007,28(7):1322-1327.
[7]李波,曾致远,付祥胜.基于数学形态学和边缘特征的车牌定位算法[J]. 电视技术,2005,29(7):94-96.
[8]燕鹏,刘长松,丁晓青,等.复杂背景下的汽车牌照自动识别系统[J].电视技术,2005,29(6):90-93.
[9]张云哲,赵海,宋纯贺,等.一种新的连通区域标记算法[J].计算机应用研究,2010,27(11):4335-4340.
