基于背景重构的运动对象越界侦测方法
2012-06-25李文耀
洪 虹,李文耀
(武汉邮电科学研究院,湖北 武汉 430074)
运动对象越界侦测(例如安全禁区监控、车流量统计)是监控领域经常用到的功能,目前的运动对象统计方法主要有地感线圈检测、视频检测、微波检测、激光检测等方法。地感线圈检测方法因其成本低、精度高、性能稳定、抗干扰能力强等优点而得到广泛应用,但其缺点是需要切割道路,不仅工程量大、影响道路、影响美观,而且切割后的道路容易损坏。微波检测和激光检测因为成本高,主要用于流动执法等场合。视频检测克服了地感线圈检测方法的缺点,使用方便,价格低廉,应用面越来越广。
笔者提出了一种实用、有效的运动目标检测方法,即基于背景重构的运动对象越界侦测方法。首先,该算法通过对一批视频流图像计算构造背景图像,然后利用当前视频图像和背景视频图像,通过差分法获取运动对象模型和背景差值,利用运动对象模型的连续性绘制运动对象轨迹,依据轨迹和警戒线交叉方程进行越界侦测。同时,利用背景差值融合背景视频生成新的背景图像,能有效保证识别算法的自适应性,提高侦测结果的准确性。
1 运动对象检测
运动对象检测就是从实时视频图像序列中抽取出感兴趣运动对象。该技术是计算机视觉、模式识别、视频图像跟踪等应用领域的重要研究内容[1-8]。运动目标检测示例见图1,图中用红色框(原图片为彩色图)标注的人和车辆便是感兴趣的目标,比如汽车和行人。

图1 运动目标检测示例
在运动目标检测过程中,经常会用到帧差分和背景差分两种检测算法。
1.1 帧差分法
帧差法是对连续两幅视频帧作差分减法,通过设定一个合理差分阈值来分割运动目标和背景[9-11]。帧差分法示例见图2,最左边为连续两幅帧图像得到,中间为帧差的结果,最右边为最终分割结果。
帧差分法对于检测复杂动态环境下的运动物体,具有较强的自适应性和很好的可靠性。但由于运动物体上相似像素的替换效应,帧差分不能完全地提取出运动物体所有相关的特征像素点,这样在运动实体内部容易产生空洞现象。
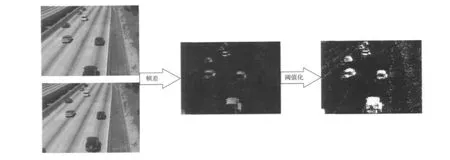
图2 帧差分法示例
1.2 背景差分法
背景差分法是用当前视频帧与背景图像进行差分,通过设定一个合理的差分阈值来分割运动目标和背景。如图3所示,最左边为两幅帧图像,左上一幅为背景图,左下一幅为当前帧图像,最右边为最终分割结果。
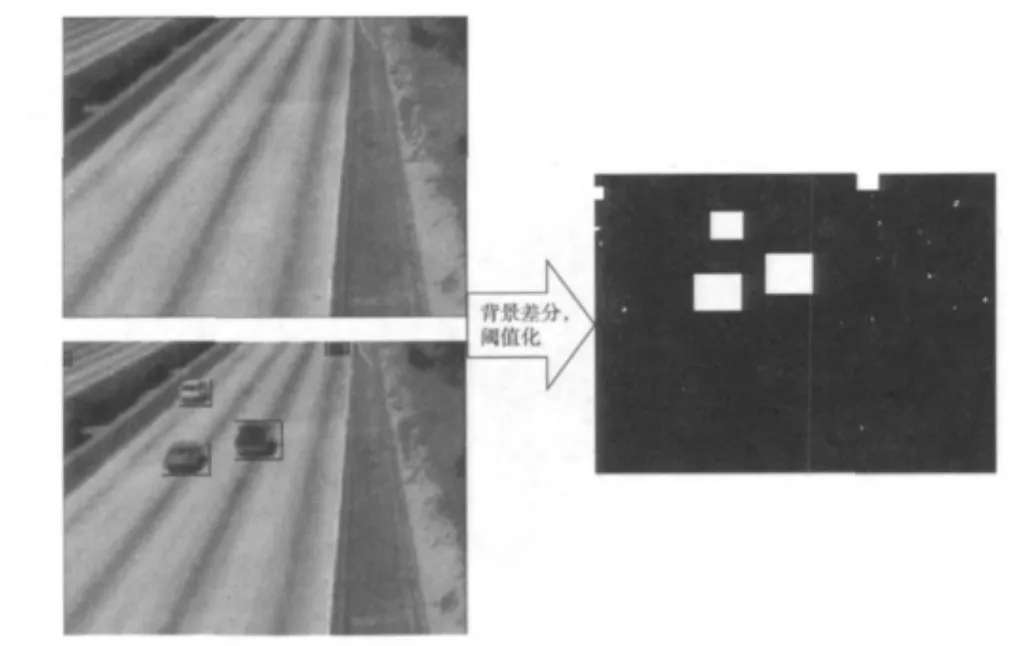
图3 背景差分法示例
背景差分法通过实时图像和标准背景图像的差分,判断运动物体上移动像素,同时通过统计分析移动像素,可以判定运动目标的有效位置、大小、形状等信息。
在实际采用背景差分法的过程中,经常会碰到以下困难:
1)背景图像是背景差分法的基础,但是在实际条件中,很难在场景没有运动物体干扰的情况下获取有效的背景图像。
2)背面图像中非固定元素的干扰,比如背景中的树木、花草、彩带等容易晃动的对象,易对算法判断产生影响。
3)在监控过程中,外界光照、天气等元素的变化也会对检测结果造成影响。
4)如果背景中的固定对象被动或主动地产生移动,则可能造成移走的区域被一直误判为运动目标。
2 运动对象跟踪和背景更新
运动目标跟踪是对于连续视频图像中存在的同一个运动目标进行跟踪并记录其运动的轨迹。
2.1 算法原理描述
这里提出了一种实用、有效的运动目标检测与跟踪方法,该算法综合考虑了帧差分法和背景差分法的特点,通过重构背景的方法来准确定位运动目标。首先,通过学习一系列视频帧图像来构造背景图像;然后,将当前视频图像与背景图像进行差分处理,得到运动目标,将其加入运动目标队列,并通过目标匹配算法跟踪同一个目标;接着,将当前视频图像与背景图像进行拟合,得到新的实时背景图像。该算法系统框图如图4所示,图中方框代表数据,椭圆框代表处理环节,虚线框包括的4个部分为系统主要处理模块,处理流程为运动检测→目标匹配→目标判断→背景更新→运动检测,如此反复处理连续视频图像。
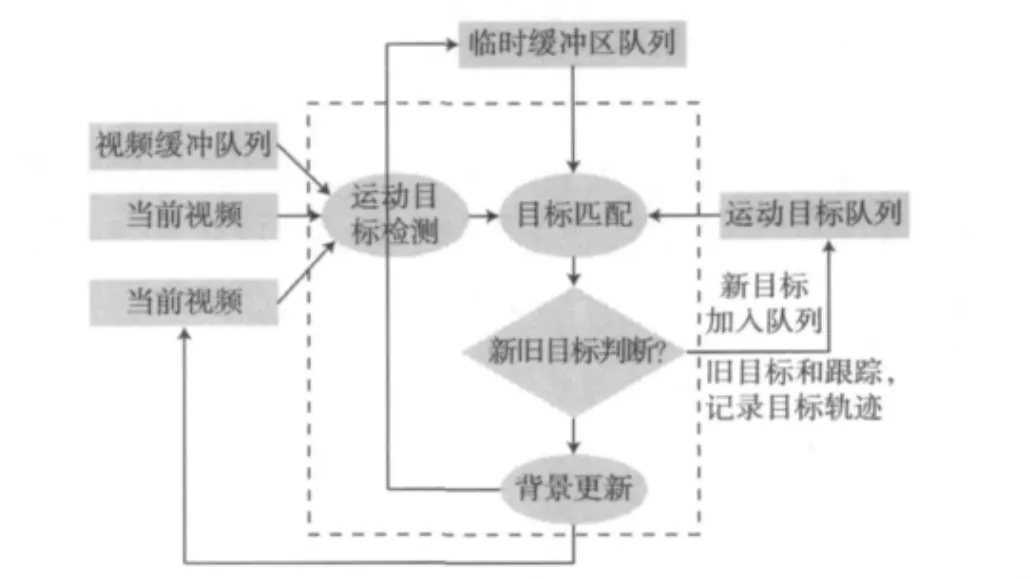
图4 算法系统框图
2.2 运动区域检测
帧间差分法能够检测出相邻两帧间发生了变化的区域,这个区域实际上包括运动目标在前一帧所覆盖的区域(即显露区)和运动目标现在所覆盖的区域(在当前帧中就是运动目标本身)。检测的规则如下
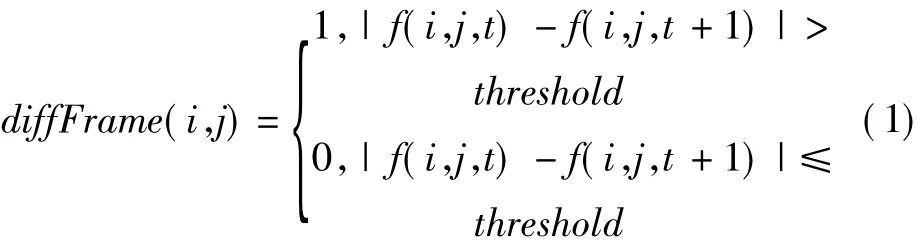
式中:diffFrame(i,j)为分割结果图,是一个二值图;f(i,j,t)表示t时刻帧图像在坐标(i,j)处的灰度值,f(i,j,t+1)表示t+1时刻帧图像在坐标(i,j)处的灰度值,threshold为阈值,算法中取10。
通过上述操作,得到一幅运动区域图,即diffFrame(i,j),其中 diffFrame(i,j)=1 表示为运动点,diffFrame(i,j)=0表示静止点。由于运动区域图中存在一些噪声,如独立的小块、空洞等,因此还需要做必要的膨胀、腐蚀、开闭等滤波操作。运动区域检测滤波效果如图5所示,上侧为运动目标分割图,下侧为经过滤波后的结果图,从图中可以看到,噪声都被消除了。

图5 运动区域检测滤波效果图
2.3 运动目标匹配
对于视频流中检测到的一个目标,将会出现在连续的视频流中,这里需要对同一个目标进行跟踪,这个问题也就转换为同一个目标在连续视频流中的图像匹配问题。图像匹配的思路很多,有模板匹配法、Adaboost方法和SIFT方法,这些方法的开销很大,需要占用大量资源,有时难以做到实时处理。本文提出一种实用的方法,如果视频采集设备的采样率比较高,能达到在20 f/s以上,则同一个目标出现在前后连续视频中必然会出现重叠部分,具体情况如图6所示,该图反映了一个目标在连续视频流中出现的空间位置情况(如1,2,3),黑色区域即为重叠区域。
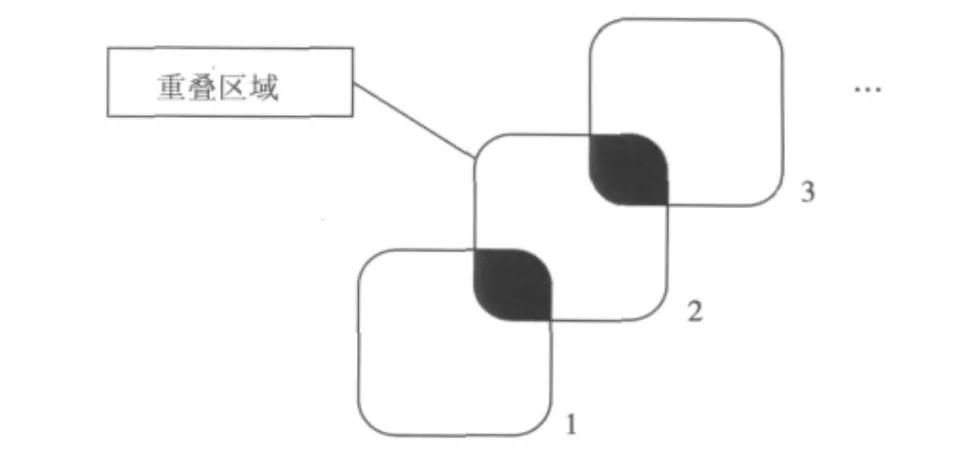
图6 运动区域重叠图
从上图中可以看出,只要保证足够大的采样率,即便再快速的运动目标也会出现重叠区域,对于慢速运动的目标更是如此,因此可以将图像匹配问题进一步简化为重叠区域的检测问题。通过判断相邻帧运动区域重叠来跟踪运动目标,识别其运动轨迹。
2.4 背景图像更新
由于背景图像受到来自自然光照、天气的影响,为了得到一个相对稳定的背景,需要对背景图像进行实时更新。在实际应用中,应该根据实际环境情况选取相应的背景更新规则,以获得更好的性能。
背景更新原则一:对于背景图像中一个特定像素点,根据2.2节的原理检测该点在当前帧中是否位于运动区域,若该点为运动点,采用当前帧中该点的值替换背景图像中对应位置处的像素值,若该点不是运动点,则该点在背景图像中对应位置处的像素值不予更新。
背景更新原则二:对于背景图像中一个特定像素点,根据2.2节的原理检测该点在当前帧中是否位于运动区域,采用以下公式进行更新

式中:bg(i,j)为当前背景值,Frame(i,j)为当前帧值,α通常取0.7~0.9,需要根据实际情况作出选择;若该点不是运动点,则该点在背景图像中对应位置处的像素值不予更新。
3 越界侦测
越界侦测是对视频区域设定的一条警戒线,当运动目标穿越了该线时,则判断为越界。越界检测思路为:利用前面所述的方法,可以检测到视频中的运动目标并跟踪运动轨迹,此时计数问题可以归结为判断两条线段的相交问题,若两条线段相交,表示有运动目标越界,若两条线段不相交,则表示无越界情况。越界侦测如图7所示。
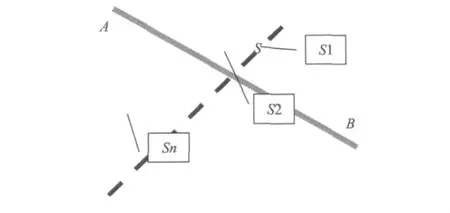
图7 越界侦测
如图7中,线段AB表示警戒线,虚线段S表示目标运动轨迹,S={S1,S2,…,Sn},这里Sn表示轨迹点。若目标穿越警戒线,则线段AB与线段S1S2相交;若目标没有穿越警戒线,则线段AB与线段S1S2不相交。设A坐标(Xa,Ya),B 坐标 (Xb,Yb),S1 坐标 (x1,y1),S2 坐标(x2,y2),则上述两条线段可以用如下方程表示
利用式(3)和式(4)求解交点。
越界侦测统计如图8所示(原图为彩色图),图中蓝色线显示了车辆跟踪的轨迹图,绿色数字为车辆编号,红色的一条线为警戒线,当一辆车驶过该警戒线时,越界计数器加1,“flux:10”显示了当前已有10辆车越界驶过。

图8 越界侦测统计
4 小结
笔者提了一种基于背景重构的运动对象越界侦测技术,该方法简单实用,且具有很好的自适应性和准确性,可广泛应用于智能交通、安防等行业,如智能交通中的闯红灯抓拍系统、公路车辆检测与记录系统、交通流量检测系统、人流量统计计数系统、安防中的入侵检测等。
[1]CHEN H T,LIU T L.Trust-region methods for real-time tracking[EB/OL].[2011-09-20].http://www.google.com.hk/url?sa=t&rct=j&q=CHEN+H%EF%BC%8CLIU+T.+Trust-Region+methods+for+real-time+tracking&source=web&cd=6&ved=0CFsQFjAF&url=http%3A%2F%2Fwww.iis.sinica.edu.tw%2F ~ liutyng%2FPublication_files%2Ficcv01.pdf&ei=sRhXT - ThKNCTiQeNxbz-NDQ&usg=AFQjCNHKNwfJAcFKwWCQl2exDz13ykhMjQ&cad=rjt.
[2]WREN C,AZARBAYEJANI A,DARRELL T,et al.Real-time tracking of the human body[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1997,19(7):780.
[3]TOYAMA K,KRUMM J,BRUMITT B,et al.Wallflower:principles and practice of background maintenance[C]//Proc.7th IEEE International Conference on Computer Vision,1999.Greece:[s.n.],1999:255.
[4]FREER J A,BEGGS B J,FERNMDEZ-CANQUE H L,et al.Automatic intruder detection incorporating intelligent scene monitoring with video surveillance[C]//European Conference on Security and Detection.London:[s.n.],1997:109-113.
[5]TAKANO T,USHITA K.Intruder detection system by image processing[C]//Proc.Conference on Security Technology,Institute of Electrical and Electronics Engineers 28th Annual 1994 International Carnahan.Albuquerque,NM,USA:[s.n.],1994:31-33.
[6]HARITAOGLU I,HARWOOD D,DAVIS L S.W4S:A real-time system for detection and tracking people and their parts[C]//Proc.IEEE Computer Society Conference on Computer Vision and Pattern Recognition.[S.l.]:IEEE Press,1998:962-977.
[7]胡俊,苏祥芳,刘立海,等.图像序列运动检测算法的研究及应用[J].武汉大学学报:自然科学版,2000(10):613-616.
[8]艾海舟,乐秀宇.面向视觉监视实时跟踪的动态背景更新方法[J].计算机工程与应用,2001(19):104-106.
[9]范勇,游志胜,张建州,等.一种快速运动目标检测与跟踪算法[J].光电工程,2000,27(6):30-33.
[10]刘亚,艾海舟,徐光佑.一种基于背景模型的运动目标检测与跟踪算法[J].信息与控制,2002,31(4):315-319.
[11]蔡荣太,吴元昊,王明佳,等.视频目标跟踪算法综述[J].电视技术,2010,34(12):22-23.
