基于Google Earth的输电线路巡视无人机地面站监控系统
2012-06-23蒋才明唐洪良陈贵黄宵宁
蒋才明,唐洪良,陈贵,黄宵宁
(1.杭州电力局,杭州310009;2.余杭供电局,杭州311100;3.萧山供电局,杭州311200;4.南京工程学院,南京211167)
基于Google Earth的输电线路巡视无人机地面站监控系统
蒋才明1,唐洪良2,陈贵3,黄宵宁4
(1.杭州电力局,杭州310009;2.余杭供电局,杭州311100;3.萧山供电局,杭州311200;4.南京工程学院,南京211167)
通过研究Google Earth电子地图的GIS二次开发技术,构造了无人机地面站电子地图显示与交互环境,结合无人机的物理-数学模型,定制无线数据通信协议,在Google Earth视图中对无人机进行三维飞行仿真和航迹实时跟踪显示,实现了地面站对空中无人机执行输电线路巡视飞行姿态和航路的全过程实时监控。
输电线路;巡视;无人机;地面站;监控系统;Google Earth
0 引言
输电线路的运行状况、设备缺陷以及沿线情况都会影响电网的安全运行和电力系统的稳定[1]。而输电线路存在人为或自然的破坏和老化情况,要求供电企业不断提升输电线路的日常巡视和检测水平,加强线路及通道的状态巡视和监测。采用人工地面观察或登杆(塔)排查等传统巡检手段,不仅受自然条件制约,而且存在劳动强度大、人身安全有隐患、巡检效率低、巡检质量与巡检人员的技术素质直接相关等问题,已无法适应当前大电网安全生产的要求[2-3]。
采用无人机进行输电线路巡视是近年来在载人直升机巡视技术思路上发展起来的一项新技术[4-5]。无人机离不开地面站的指挥与控制,随着无人机技术的发展,地面站的功能也越来越全面,嵌入电子地图后将有助于地面控制人员制定航路和观察无人机的地理位置。目前,基于GIS(地理信息系统)技术的地面站已非常成熟,利用MapInfo公司的MapX,Intergraph公司的GeoMedia,ESRI公司的MapObjects等都是为满足不同需求而开发的软件系统[6-8]。
Google Earth是现代地图的典型代表,提供资料丰富的GIS数据库,除了显示卫星影像图外,还能显示矢量数据[9]。本文将利用Google Earth的二次开发技术实现地面站的GIS功能,以微小型航拍无人机为研究对象,完成基于Google Earth地面站的仿真验证研究。
1 系统功能
本文所实现的系统结构框图如图1所示。
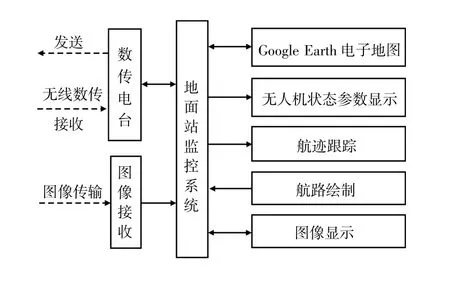
图1 地面站监控系统结构
地面站监控系统是在地面计算机上运行的软件系统,是无人机飞行控制和管理系统的核心,主要完成无人机的航迹跟踪、飞行状态参数显示、实时图像监控以及地面通信等功能。电子地图是无人机地面站在任务规划时不可缺少的功能,将目前广泛应用的Google Earth电子地图引入地面站系统作为其获取地理信息的手段,为操作人员提供逼真的三维视图场景,大大提高了任务执行的准确度。软件实现流程如图2所示。
Google Earth提供在C++平台上进行二次开发的API函数,通过调用Google Earth COM API函数,完成地面站电子地图人机交互的功能[10]。
在图像监控模块中,采用OpenCV(Open Source Computer Vision Library)开发工具获取图像。OpenCV是Intel公司面向应用程序开发者开发的一种开源计算机视觉库,由C函数和少量C++类构成,实现了图像处理和计算机视觉方面的通用算法[11]。本系统利用OpenCV库函数调用图像采集卡接收图像,并在地面站监控软件中显示。图像获取软件实现流程如图3所示。
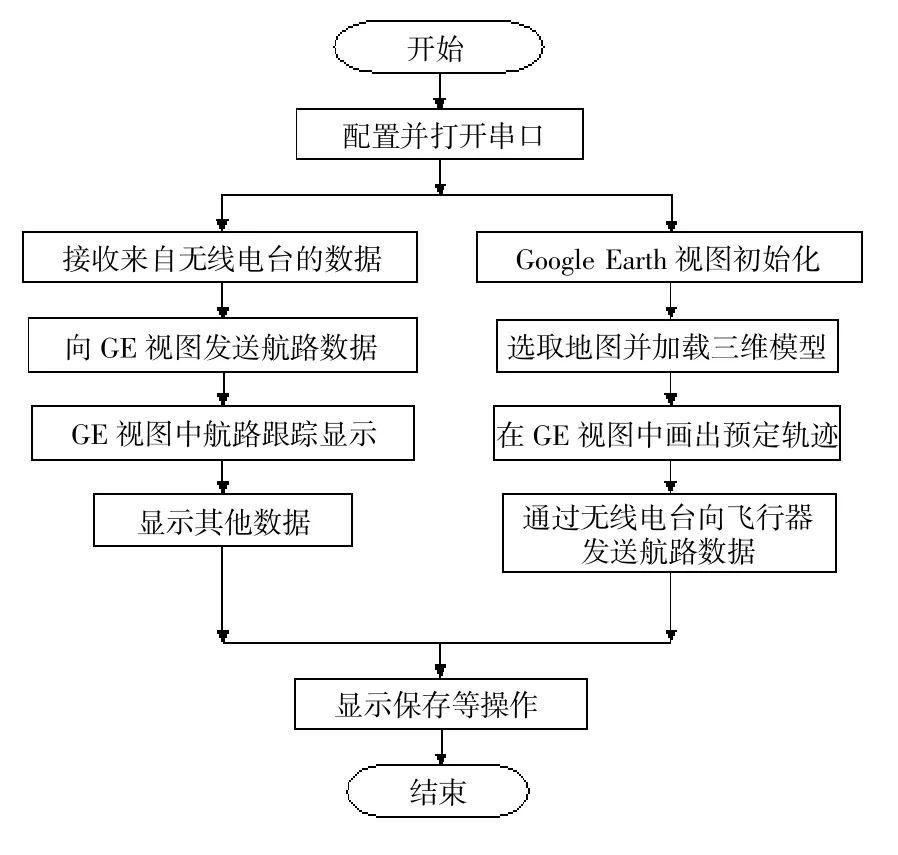
图2 地面站监控系统软件流程
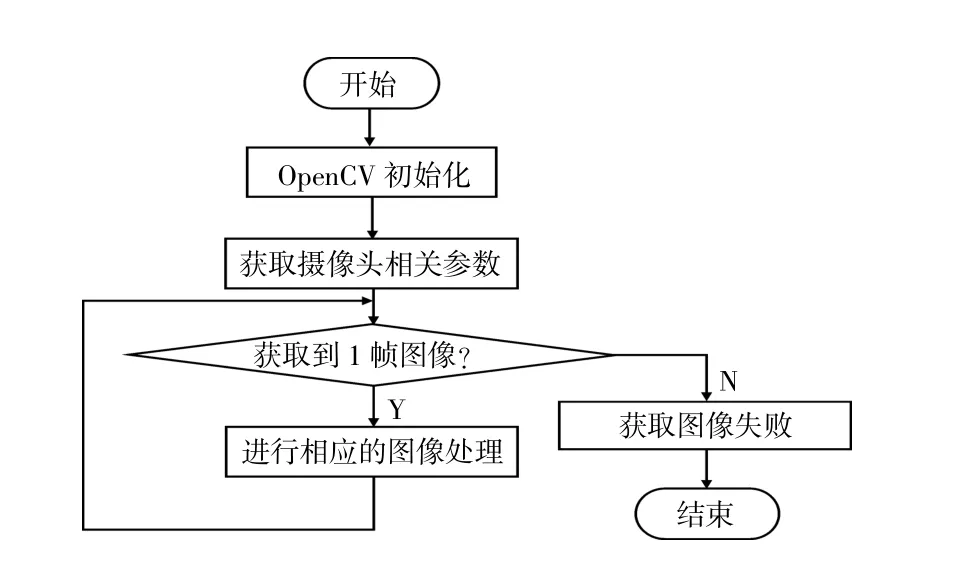
图3 图像获取软件实现流程
2 关键技术的实现
Google Earth客户端软件为用户提供两种扩展接口,一种是KML(Keyhole Markup Language)文件形式,另一种是组件(COM)API形式[12],Google Earth二次开发的系统构架如图4所示。
通过深入研究Google Earth的二次开发,实现了三维模型的动态显示与无人机航迹跟踪显示等关键技术。
2.1 Google Earth三维模型的实现
三维模型的绘制主要利用Google SketchUp软件工具来实现。本文以四旋翼和固定翼无人飞行器为例,在SketchUp软件中设计并绘制三维模型,如图5所示。
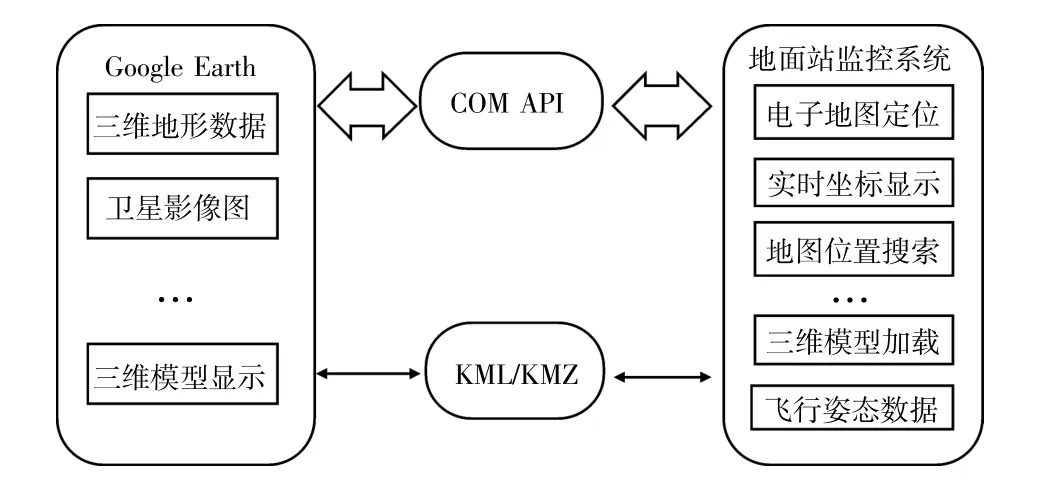
图4 基于Google Earth的GIS系统构架

图5 在SketchUp中的无人机三维模型
SketchUp软件有自动生成KMZ格式文件的功能,通过该功能可以导出带有三维模型显示的KMZ文件,导出后用Google Earth进行解析并保存为KML格式文件,此时可以对KML文件的tag标签内容按要求进行修改。主要修改KML文件中的经/纬度、高度、偏航(heading)、俯仰(tilt)、滚转(roll),所对应的KML描述语句如下:
<Location>
<longitude>…</longitude>
<latitude>…</latitude>
<altitude>…</altitude>
</Location>
<Orientation>
<heading>…</heading>
<tilt>…</tilt>
<roll>…</roll>
</Orientation>
通过编程方式对KML文件内的标签值进行修改,实现三维模型的动态显示。软件流程如图6所示。
2.2 Google Earth视图航迹跟踪显示
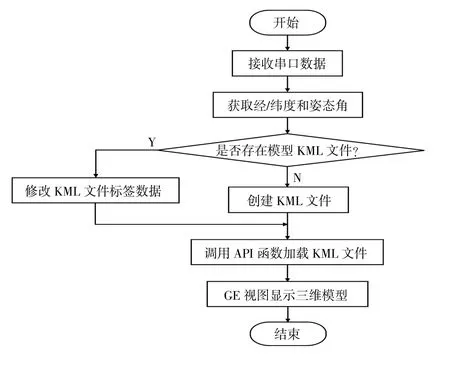
图6 无人机三维模型动态显示流程
无人机的航迹跟踪主要是通过增加KML文件中的地标点来实现航路的显示,KML文件描述如下:
<Placemark>
<LineString>
……
<coordinates>…</coordinates>
</LineString>
</Placemark>
在<coordinates>标签中按顺序添加每个坐标点的经/纬度和高度信息,加载KML文件后,在Google Earth视图中显示由这些坐标点连接的线段。只要获取无人机的定位信息,利用程序自动添加到<coordinates>标签内,便能显示无人机的航迹。
3 仿真验证
结合半物理仿真平台对地面站系统进行仿真验证,利用已建立好的无人机数学模型[13],用PC机模拟无人机的飞行控制,结合地面站监控软件进行测试验证。图7是地面站监控系统半物理仿真平台的结构框图。
在地面站监控软件电子地图中绘制航路的操作步骤如下:
(1)通过地面站的操作进入绘制航路模式,即安装鼠标键盘钩子。
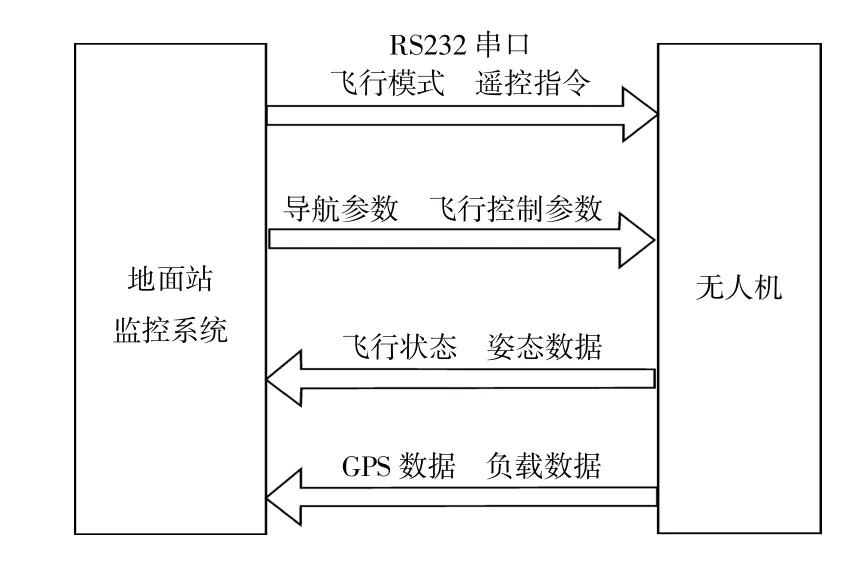
图7 半物理仿真平台结构
(2)将鼠标放在需要绘制航路点的位置,点击鼠标右键弹出对话框,设置航路点种类以及经/纬度等信息,保存后Google Earth视图中即显示所绘制的航路点,如图8所示。

图8 地面站Google Earth视图中绘制的航路
(3)在地面站监控软件中获取绘制的航路点信息,然后按照通信协议将航路点上传到无人机,无人机将返回信息并提示上传航路成功。
此时,无人机已装载航路,将其飞行状态切换至自主模式,无人机将通过判断所装载的起飞航路点进行自主模式的飞行。无人机在飞行过程中,将飞行状态数据通过无线数传模块传输给地面站,并在Google Earth视图中显示无人机的飞行轨迹,在地面站监控系统中与实际绘制的航路点进行对比,如图9所示,无人机通过航路点为等高飞行且为提前转弯模式。
在图9中,三维模型为固定翼无人机飞行器,白色细线为无人机飞行轨迹,由于无人机存在最小转弯半径的限制,因此在航路转弯部分显示出如图中所示的效果。仿真结果表明,航迹跟踪性能较好,但压迹效果不理想,电子地图响应速度较慢,分析其原因主要是:Google Earth的经/纬度还存在偏差,导航定位不够准确,无人机模型解算出的数据还不太理想,需重新调试控制参数。此外,由于Google Earth是一款在线的电子地图,服务器响应缓慢,从而产生延时。

图9 航迹跟踪仿真效果
4 结语
运用Google Earth二次开发技术,在Google Earth视图中进行无人机的三维建模,结合无人机半物理仿真平台和制定无线数据通信协议,在Google Earth视图中实现无人机的飞行仿真和航迹实时跟踪显示。本成果已在具体项目中实施并得到验证,很好地完成了地面站对空中无人机执行输电线路巡视飞行姿态和航路的全过程实时监控。在大力推进智能电网建设的背景下,深入研究无人机的安全控制技术具有非常积极的意义和良好的工程应用前景。
[1]于德明,沈建,汪骏,等.直升机在电网运行维护中的研究与应用[J].电网技术,2009,33(6):107-112.
[2]刘振亚.智能电网技术[M].北京:中国电力出版社,2010.
[3]孙才新.重视和加强防止复杂气候环境及输变电设备故障导致电网大面积事故的安全技术研究[J].中国电力,2004,37(6):1-8.
[4]LUIS MEJAS,JUAN F.CORREA.COLIBRI.A visionguided UAV for surveill-ance and visual inspection[C]. 2007 IEEE International Conference on Robotics and Automation,Roma,Italy,2007.
[5]SERGE MONTAMBAULT,JULIEN BEAUDRY.On the application of VTOL UAVs to the inspection of power utility assets[C].2010 1st international conference on applied robotics for the power industry,Delta Centre-Ville,Mon-tréal,Canada,2010.
[6]张劲锐,卢京潮.基于GIS的无人机地面测控系统设计与实现[J].弹箭与制导学报,2008,28(05):245-248.
[7]李海蓉,王绪本,郑文锋.基于GeoMedia的组件式GIS二次开发研究[J].软件导刊,2007(05):93-95.
[8]贺光霞.基于GIS的无人机地面控制站的实现[J].无线电工程,2007,37(02):36-38.
[9]HUAIYU XU,XIAOYU HOU,HENG CAI,et al.Online geographic information service platform based on Google Earth[C].2009 9th international conference on hybrid intelligent systems,2009.
[10]马俊,杨忠,杨成顺,等.基于Google Earth的人机交互平台设计[J].应用科技,2010,37(7):6-10.
[11]F LLORENS,F.J MORA,M PUJOL,et al.Working with OpenCV and intel image processing libraries.Processing image data tools[J].6thWorld multiconference on systemics,cybernetics and informatics,2002,20:51-56.
[12]Google,Inc.Google Earth COM API Documentation.http: //earth.google.com/comapi/index.htm[EB/OL].2009-9-12.
[13]程林,樊琼剑,杨忠.基于虚拟现实的无人机飞控系统半物理仿真研究[J].中国制造业信息化,2006,35(19):96-98.
(本文编辑:龚皓)
Ground Monitoring System of Unmanned Aerial Vehicle for Inspection of Transmission Lines Based on Google Earth
JIANG Cai-ming1,TANG Hong-liang2,CHEN Gui3,HUANG Xiao-ning4
(1.Hangzhou Municipal Electric Power Bureau,Hangzhou 310009,China;2.Yuhang Electric Power Bureau,Hangzhou 311100,China;3.Xiaoshan Electric Power Bureau,Hangzhou 311200,China;4.School of Electric Power Engineering,Nanjing Institute of Technology,Nanjing 211167,China)
With the secondary development technology of Geographic Information System(GIS)on Google Earth,the display of the electronic map and the interactive environment in the ground station of Unmanned Aerial Vehicle(UAV)are built.According to the physical and mathematic model of UAV,the wireless data communications protocol is formulated.The three-dimensional flight simulation and real-time tracking display of flight path of UAV have been implemented in the Google Earth view.The real-time full monitoring of flight attitude and path of UAV for transmission line inspection are achieved by ground station.
transmission lines;inspection;unmanned aerial vehicle;ground station;monitoring system; Google Earth
江苏省高校自然科学基金资助项目(09KJB470002);南京工程学院科研资金资助项目(KXJ08061)
TM764.2
:B
:1007-1881(2012)02-0005-04
2011-11-15
蒋才明(1977-),男,浙江诸暨人,工程师,从事输电线路规划设计、运行检修等方向的管理与研究工作。
