基于增量模型的BTT导弹新型解耦补偿控制
2012-06-22曾宪法王小虎
曾宪法 王小虎
(北京控制与电子技术研究所,北京100038)
张 晶
(北京航空航天大学自动化科学与电气工程学院,北京100191)
倾斜转弯(BTT,Bank-To-Turn)导弹通过快速滚转运动使主升力面迅速指向目标,同时通过俯仰运动产生期望的过载.正是由于BTT导弹的快速滚转运动,使其通道间的气动耦合、运动耦合及非线性特性非常严重;同时在飞行过程中还存在着各种干扰和不确定性.这些因素为BTT导弹控制系统的设计带来了挑战.
传统的BTT导弹控制以经典控制理论为基础,首先忽略耦合而单独设计各通道,然后在控制律中加入协调支路,以削弱通道间的耦合[1].该方法简单易行,在工程上得到广泛应用,但是当滚转角速度较大时,结果并不理想,而且参数调节较为困难.随着非线性控制理论的发展,以动态逆为代表的各种非线性控制技术广泛用于解决这类时变、非线性、强耦合的复杂系统[2-9],但是这类方法还存在一些问题,例如,动态逆方法[2-4]对被控对象数学模型过于依赖;神经网络自适应方法[5-6]较为复杂,且学习速率能否满足实时控制的要求还有待进一步研究;变结构控制[7-8]目前多与反馈线性化相结合,因此除了抖振问题之外,其对模型也存在一定依赖性.
为充分利用非线性控制的优势,并提高控制的鲁棒性和可实现性,本文在文献[9]的基础上提出了一种基于增量模型的解耦补偿控制方法.通过建立BTT导弹的增量模型,并以其为基础结合动态逆设计一种增量式解耦控制律,减小了对模型的依赖;为进一步提高控制性能,提出了一种简单的干扰估计/补偿策略对干扰进行估计和补偿;数学仿真验证了本文方法的有效性.
1 BTT导弹的动态逆控制分析
考虑如下BTT导弹数学模型:

为便于控制律设计,根据奇异摄动原理对导弹模型进行时标分离,可设计内、外回路的动态逆控制律分别为
为更为直观地了解动态逆控制的特点,将式(3)展开可得
由式(4)可知,偏航与俯仰通道的角速度指令包含解耦项 αC1(γc-γ)和 βC1(γc-γ),这与BTT 控制的传统解耦项[11]ωxα,ωxβ 基本一致,不同之处在于动态逆是采用ωxc计算解耦项,相比传统解耦其具有超前特性,使指令更为协调.
另一方面,与传统的增益调参相比,动态逆的参数调节更加简单,且c3,b3,a3的物理含义对内回路控制参数的调节具有指导意义.
2 BTT导弹的新型解耦补偿控制
2.1 基于增量模型的解耦跟踪控制
假设1 控制量连续且计算频率足够快(通常为控制系统开环截止频率的5倍以上).
假设2 不考虑模型不确定性及外部干扰.
2.1.1 外回路控制律设计
假定当前时刻的状态表示为xcurr,控制输入为 x1curr,由此产生的动态为 x·2curr,则根据式(1)中的名义模型部分可建立当前时刻的方程为

令下一时刻的状态为xnext,期望的动态为x2d,而产生该期望动态的控制量为x1c,则它们之间的关系为

将式(7)与式(6)相减,整理可得

根据假设1,可认为以下关系成立:
于是,简化式(8)可建立外回路的增量模型为

式中,Δx1c=x1c-x1curr为外回路输入指令增量.
进一步基于式(9),结合动态逆思想,可设计如下增量形式的控制律为

2.1.2 内回路控制律设计
内回路用于产生期望的舵偏角指令,由于与外回路的设计过程类似,因此中间过程不再赘述,仅给出设计结果.
根据式(2)建立由当前时刻到下一时刻的增量模型为

基于式(11),结合动态逆思想可得内回路的增量式控制律为

显然,在式(12)中除了 c3,b3,a3之外,不再包含其它与气动系数相关的量,因此对模型的依赖程度大幅降低.而c3,b3,a3的不确定性可通过调节K1,K2,K3或其它自适应方法予以补偿.
2.2 闭环系统鲁棒性分析
假设3 外部干扰及其导数均有界.
根据式(1)和式(2),按照增量控制的特点建立当前时刻与下一时刻的动态方程为
式中,d1curr,d2curr,d1next,d2next分别为当前时刻及下一时刻内、外回路的外部干扰.
将式(10)和式(12)代入式(14)可得
为简化推导,且不失一般性,假设:

式中,Δg'1和Δg'2分别为内、外回路逆误差.
将式(13)、式(16)代入式(15),可得

式中,D1next和D2next为内、外回路总误差,且:
为进行对比分析,按照上述方式可进一步推导式(3)的误差特性为

式中
显然,与 D1next,D2next相比,D'1next,D'2next中包含了与气动力和力矩系数相关的Δf1和Δf2,相比其它项,Δf1和Δf2更大且难于测量.
另一方面,在假设 1和假设 3下,δf1,δf2,δg1,δg2均很小,且干扰增量 d1next-d1curr与 d2nextd2curr也将显著小于d1next和d2next本身.
综上,在干扰及不确定性存在的情况下,本文控制方法误差将远小于传统动态逆方法.
2.3 一种简单的干扰估计/补偿策略
为进一步提升控制性能,本文提出一种简单的干扰估计及补偿策略.
由式(18)可知,干扰可描述为实际动态特性与期望动态特性的差,而利用这一特点可对干扰进行估计.
尽管D1next与D2next难以获得,但是根据假设1和假设 3,可认为 D1curr≈D1next和 D2curr≈D2next成立,其中D1curr,D2curr为当前时刻内、外回路总误差.故可将它们作为下一时刻干扰的估计,即

将式(10)、式(12)与式(19)相结合,即可得完整的BTT导弹的新型解耦补偿控制律为
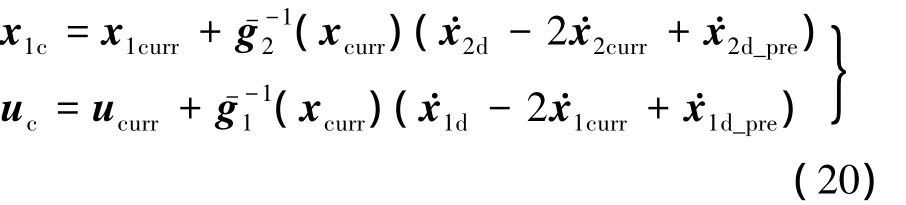
2.4 状态及其导数信号的获取
式(20)中所需的各种状态及其导数信号可通过测量或计算的方式获得.其中角速度、姿态角和角加速度可分别由惯导、速率陀螺和角加速度传感器测量得到;滚转角导数则可由角加速度、角速度及姿态角信号计算得到.但是攻角及侧滑角导数信号较难直接测量,因此本文通过构造跟踪-微分器[12]的方法来间接获取.获取攻角导数信号的跟踪-微分器可构造为

式中,R为设计参数;z1和z2分别用于逼近攻角及其导数信号;b为一小正常数;令 z=z1-α+|z2|z2/2R,则饱和函数为
获取侧滑角导数信号的跟踪-微分器与式(21)类似,只需将被跟踪信号换成侧滑角即可.
3 仿真分析
在MATLAB/SIMULINK环境中建立BTT导弹六自由度数学模型,气动数据取自文献[5].
控制参数设置为:K=diag(25,25,25),C=diag(5,5,5);控制计算步长为 0.005 s.
为验证本文方法对干扰及不确定性的适应性,将气动参数向上拉偏 30%,同时令 d1=[3,1,5]T×sin5t(°).
1)不引入干扰补偿,并与传统动态逆、PID(Proportion Integration Differentiation)控制方法进行对比,仿真结果如图1~图3所示.
由图1~图3可知,在解耦性能方面,本文方法与传统动态逆均优于PID控制方法;而在干扰的作用下,传统动态逆与PID控制的响应均出现抖动,可见这两种方法对外部干扰的鲁棒性较差;同时动态逆控制的攻角响应明显下移,证明其对参数不确定非常敏感;而基于本文方法的控制响应较为平稳,且参数拉偏对控制精度也没有影响,由此可见,本文方法的干扰适应能力及控制性能明显优于传统动态逆与PID控制方法.

图1 条件1)时攻角响应曲线
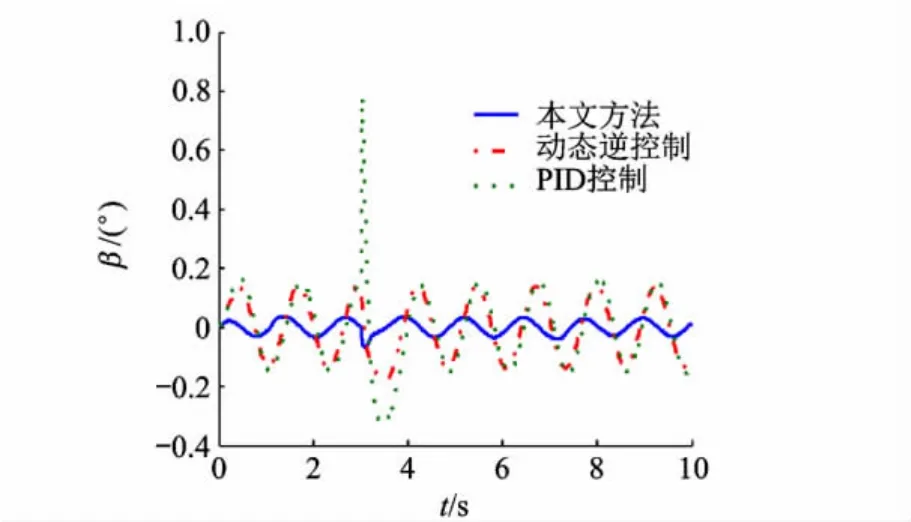
图2 条件1)时侧滑角响应曲线
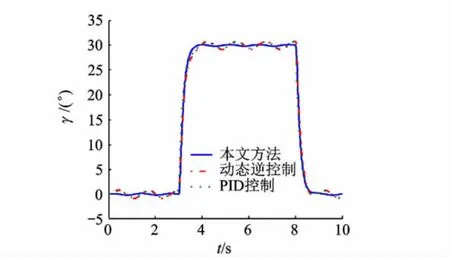
图3 条件1)时滚转角响应曲线
2)针对本文方法,进一步对有无干扰补偿的控制效果进行比较,仿真结果如图4~图6所示.
由图4~图6可知,在引入干扰补偿之后,控制性能进一步提升,由此证明了干扰估计/补偿策略的有效性.
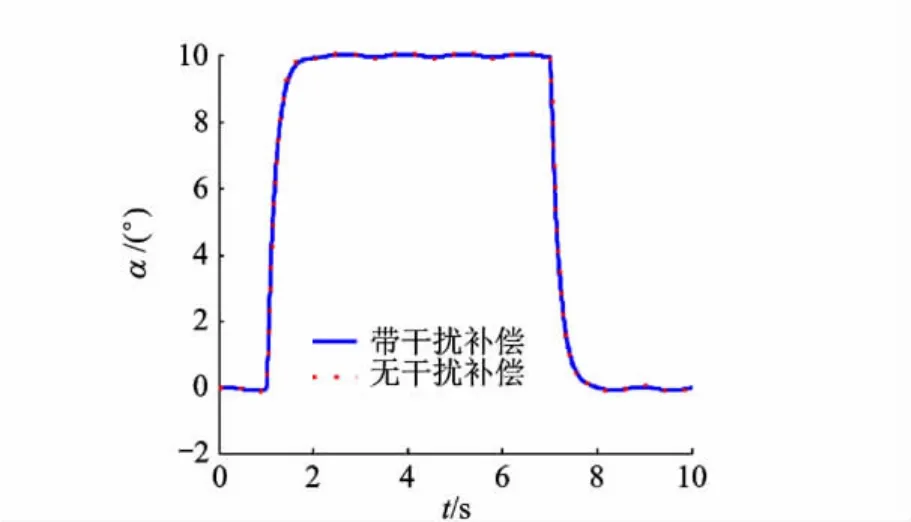
图4 条件2)时攻角响应曲线

图5 条件2)时侧滑角响应曲线
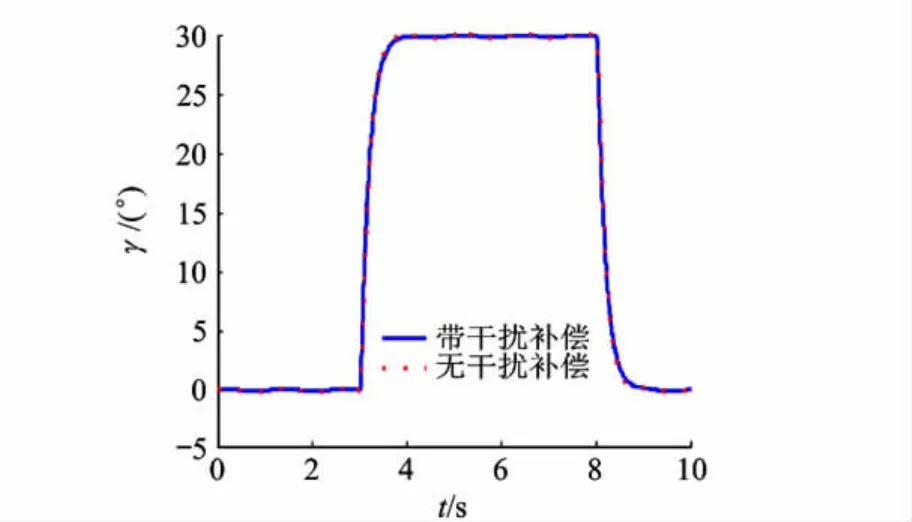
图6 条件2)时滚转角响应曲线
4 结论
本文在对传统动态逆控制的特点及局限性进行深入分析的基础上,提出了一种基于增量模型的解耦补偿控制方法,并基于该方法设计了BTT导弹内、外回路控制律,主要结论如下:
1)与传统动态逆方法相比,本文所提出的控制方法对模型的依赖程度更小,控制性能更好,且具有良好的工程可实现性;
2)与经典控制相比,本文所提出控制方法的参数调节更加简单,且物理意义明确,解耦性能与干扰适应能力更佳;
3)本文所提出的干扰估计/补偿方法能对外部干扰以及各种不确定性进行估计并补偿,进一步提升控制性能.数学仿真证明了本文方法的有效性.
References)
[1]Arrow A.An analysisofaerodynamic requirementsfor coordinated bank-to-turn autopilots[R].NASA-CR-3644,1982
[2]Kim J,Jang J.Nonlinear model inversion control for bank-to-turn missile[R].AIAA-1995-3318,1995
[3]Wee L B.Nonlinear autopilot design for bank-to-turn steering of a flight vehicle[J].Journal of Guidance Control and Dynamics,1996,19(4):978-979
[4]张艳,段朝阳,张平,等.基于动态逆的BTT导弹自动驾驶仪设计[J].北京航空航天大学学报,2007,33(4):422-426
Zhang Yan,Duan Chaoyang,Zhang Ping,et al.BTT missile autopilot design based on dynamic inversion[J].Journal of Beijing University of Aeronautics and Astronautics,2007,33(4):422-426(in Chinese)
[5]于秀萍.基于动态逆系统和神经网络理论的BTT导弹控制系统研究[D].哈尔滨:哈尔滨工程大学自动化学院,2004
Yu Xiuping.The research of BTT missile control system based on dynamic inversion system and neural network theory[D].Harbin:College of Automation,Harbin Engineering University,2004(in Chinese)
[6]Cho D,Kang S,Kim H.Adaptive dynamic surface control based on neural network for missile autopilot[R].AIAA-2011-6251,2011
[7]曾宪法,王洁瑶,王小虎,等.基于SMDO的滑模控制器设计及其在导弹上的应用[J].航空学报,2011,32(5):873-880
Zeng Xianfa,Wang Jieyao,Wang Xiaohu,et al.Design of sliding mode controller based on SMDO and its application to missile control[J].Acta Aeronautics et Astronautica Sinica,2011,32(5):873-880(in Chinese)
[8]Ahn C,Kim Y,Kim H.Adaptive sliding mode control for non-affine nonlinear vehicle systems[R].AIAA-2007-6506,2007
[9]Aaron JO,Barton JB.Enhanced NDIstrategiesfor reconfigurable flight control[C]//Proceedings of the American Control Conference.Anchorage:IEEE,2002:3631-3636
[10]郑建华,杨涤.鲁棒控制理论在倾斜转弯导弹中的应用[M].北京:国防工业出版社,2001:86-88
Zheng Jianhua,Yang Di.The application of robust control theory to bank-to-turn missile[M].Beijing:National Defense Industry Press,2001:86-88(in Chinese)
[11]彭冠一.防空导弹武器制导控制系统设计[M].北京:中国宇航出版社,1996:381-385
Peng Guanyi.Air Defense missile weapons’guidance and control system design[M].Beijing:China Astronautic Press,1996:381-385(in Chinese)
[12]韩京清,王伟.非线性跟踪-微分器[J].系统科学与数学,1994,14(2):177-183
Han Jingqing,Wang Wei.Nonlinear tracking-differentiator[J].Journalof System Science & Mathematical Sciences,1994,14(2):177-183(in Chinese)