Vibration test of micro machined gyroscope based on high speed photography and SURF
2012-06-21YAOFenglin姚峰林GAOShiqiao高世桥ZHAOJie赵婕GAOChongren高崇仁
YAO Feng-lin(姚峰林), GAO Shi-qiao(高世桥), ZHAO Jie(赵婕),GAO Chong-ren(高崇仁)
(1.School of Mechatronical Engineering,Beijing Institute of Technology,Beijing 100081,China;2.School of Mechanical Engineering,Taiyuan University of Science and Technology,Taiyuan 030024,China;3.Computer Engineering Department,Taiyuan University,Taiyuan 030032,China)
Micro-electro-mechanical systems(MEMS)is a micro device or system that make up by electronic or mechanical element.Its characteristic size is at the sub-micron and millimeter level.With the development of MEMS in both the academic and industry areas,and because the dynamic characteristics of MEMS determine their basic performance,there is increasing demand for dynamic test system.MEMS dynamic test techniques have draw great attention[1].
The most commonly used noncontact dynamic test techniques in MEMS are laser Doppler vibrometer,stroboscopic vision and stroboscopic interferometer vision measurement.Scanning laser Doppler vibrometer(SLDV)is the most mature technique among them,and it has commercial product for sale[2].However,it can measure only one point each time,which limits its application in many occasions.While stroboscopic micro vision and stroboscopic interferometer vision measurement of Massachusetts Institute of Technology(MIT)represent the most advanced MEMS dynamic test technique[3],their equipments are costly,complex to operate.
This paper introduces a dynamic test method of micro machined gyroscope based on the high speed photography and speeded-up robust features(SURF).The method can dynamically measure the displacement,vibration frequency and bandwidth.The theories of micro machined gyroscope structure and driving mechanism can be found in Ref.[4].
1 Architecture of dynamic test system based on high speed photography
The architecture of the system is shown in Fig.1.It is composed of driving part,photography part,and image processing part[5].The driving part includes regulated power supply,programmable function generator,oscilloscope and dedicated driving circuit for micro machined gyroscope.The photography part includes Carl Zeiss Jena image 2 microscope,PHOTRON SA4high speed camera and giga Ethernet.Image processing part includes computer and image processing software.The detect target is the electrostatic driving part of aZaxis micro machined gyroscope.The picture of the system is shown in Fig.2.

Fig.1 Architecture of the system

Fig.2 Picture of the system hardware
The software is programmed based on MATLAB.Since the vibration frequency(3 980Hz)and velocity of the micro machined gyroscope is high,the sample speed of the high speed camera is also high(40 000frame/s).Video process and image analysis can not process such huge data in real time.As a result,the image processing belongs to post treatment.
2 SURF algorithm of the detect system
The video file of the high speed camera shoot is composed of a series of images which is shown in Fig.3.Fig.3ais the original image of the video.Fig.3bis the differentiable sketch.The white part is the vibrating part in high frequency,the grey part is the stable structure,and the black part is the back color.The moving part can vibrate inXaxis at 4kHz.
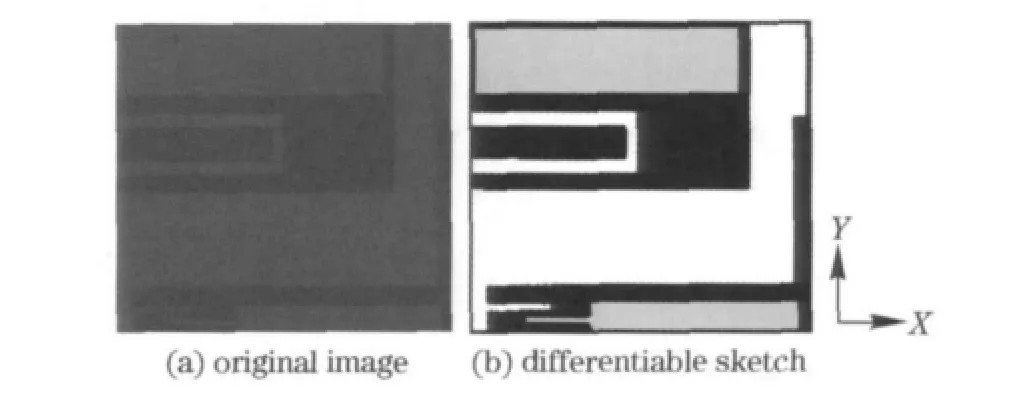
Fig.3 Image of high speed photography
To measure the vibration,the video images of the moving target are taken sequentially.Target tracking must relate the image matching.The most commonly used image matching methods are least-square optimization matching, mean shift that based on the histogram matching and SURF matching that based on the feature point.
The traditional template matching (leastsquare optimization)need large amount of calculation and can easily mismatch when the moving target in different shooting conditions and the sequential image interval is short.Although there are many improved algorithms,the positioning precision of traditional template matching is not high and the calculation is still huge[6].In the following sections,we will compare and test mean shift and SURF image tracking algorithm.
2.1 Mean shift
Mean shift algorithm can detect the mode that exist in the probability density function.Mean shift was introduced by Fukunaga et al.that related to the gradient function estimate of probability density in 1975[7].In 1995,Yizong Cheng deduced mean shift algorithm[8]and used the algorithm for pattern recognition.Comaniciu et al.applied mean shift in the analysis of feature space,image smoothing and image segmentation successfully[9].Comaniciu et al.also approximated the non-rigid target tracking problem as mean shift optimization,which could solve the tracking problem in real time[10].Many similar ways have been used.Kalman filter has been combined with mean shift in the human or object tracking and made satisfactory results[11-12].Fig.4shows the template and result of mean shift in micro machined gyroscope vibration dynamic test based on the high speed photography.
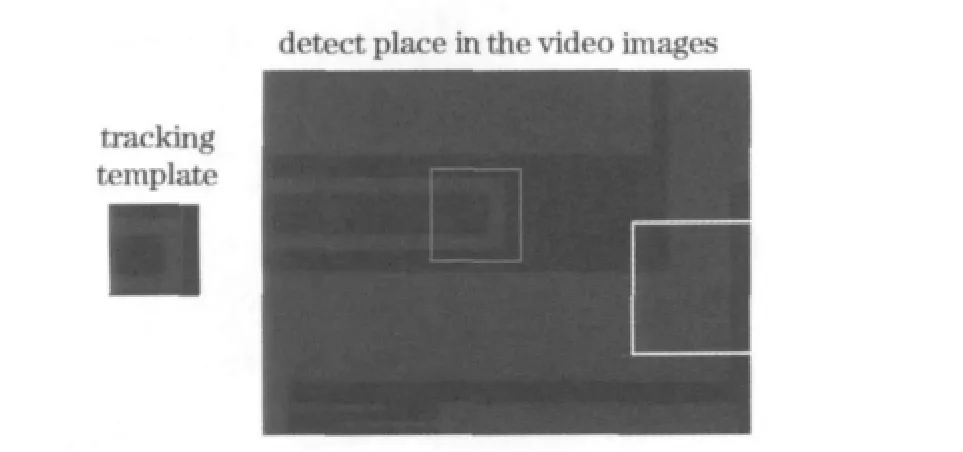
Fig.4 Mean shift template and the tracking result
Fig.5shows the tracking result of the moving target in the micro machined gyroscope that used mean shift and Kalman filter in the video[13].It can be fond that this method is effectively tracking the target.However,the essence of mean shift convergence is not very clear[14],and the accurate positioning for image is unable.After the video of high speed photography of micro machined gyroscope has been processed,the obtained data fluctuate unevenly.For the micro machined gyroscope vibration,the fluctuation is impossible.This conclusion comes from the algorithm itself.So the result can not be used as the displacement measure-ment.But it can be used in frequency analysis[15].

Fig.5 Mean shift and Kalman filter used on the video
According to the data shown in Fig.5,using FFT,Fig.6can be obtained.From Fig.6,the maximum vibration amplitude appears near the frequency of 4 000Hz,which explains that the natural frequency of the micro machined gyroscope is near this resonance frequency.

Fig.6 Mean shift and Kalman filter after FFT
2.2 SURF
D G Lowe et al.proposed scale-invariant features transform (SIFT)[16]algorithm which is a robust and scale-invariant features transform.It can extract local feature and find extreme points,extract position,scale,and rotation invariance.It can also be used in human face recognition,image stitching and image registration etc.Nevertheless,computation of SIFT algorithm is huge,complex,and time consuming.
Bay et al.proposed speeded-up robust features(SURF)algorithm[17]which used rectangular filter of different size to convolution on the original image and took the Gaussian function of different scale of SIFT instead.SURF algorithm uses Harr wavelet compute the response on the interesting point in neighborhood and takes the histogram computation instead of SIFT.SURF algorithm uses Harr wavelet that reduces the dimension of descriptive vector and speed up the matching speed.At present,SURF algorithm has been used in human tracking[18],image stitching[19]and image registration[20]. This paper uses SURF algorithm matching in high speed photography.
Firstly,since there are movable and non-mov-able parts in the image,we use regions of interest(ROI)to reduce the tracking region and the amount of computation.Secondly,we use ROI of decomposed image of the video and ROI of target image to Hessian transform,then match the feature points obtained form the first step.Finally,with many times experiment,it preserves only one feature point by means of threshold setting,removing pseudo-feature points.In Fig.7,the left is the tracking template,the right is the 125th frame of matching image,and the white line represents the matching points.The displacement of movable part can be seen obviously.By using sub-pixel,the precision of image matching can be improved.After the coordinate transform,the vibration curve can be obtained.The flow chart is shown in Fig.8[21].The vibration curve is shown in Fig.9.

Fig.7 Feature point matching of target image and template image

Fig.8 Flow chart of SURF
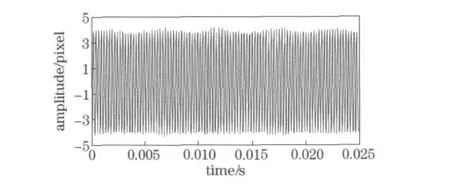
Fig.9 Time-displacement curve of SURF
3 Solution of vibration mode of micro machined gyroscope on time domain
The vibration of micro machined gyroscope can be regarded as a second-order vibration system,with the kinetics equation of[4]

wherexis the displacement of the vibration;cxis the damping factor of the driving system;kxis the stiffness of the driving system;Fecos (ωt+α)xis theelectrostaticdrivingforce.
ThesolutionofEq.(1)isthestablevibration displacementshownas

whereBxis a coefficient that interrelated with ω.ItcanbeconcludedfromEq.(2)thatthevibration frequencyisthesameasthefrequencyofthe drivingforceandtheamplitudeandphaseare different.
Generally,sinusoidalsignalisusedasthe drivingsignalofmicromachinedgyroscope[22].Itcanbeconcludedthatthetime-displacementof SURFismoreclosetothesinusoidalsignalthan meanshift.Fromthisperspective,SURFismore accuratethanmeanshift.
4 Algorithm in the frequency-domain
Using FFT and digital filtering on the timedisplacement curve that obtained by SURF,the amplitude-frequency characteristic can be obtained(Fig.10).

Fig.10 Amplitude-frequency and phase diagram
On the other hand,using numerical fitting,the points that can’t be calculated by the measure points can be obtained by interpolation.Thus,via computation of the formula,resonance frequency,Q-factor and bandwidth etc[23].can be obtained(Tab.1).

Tab.1 Statistics of vibration measurement under different driving volt
5 Conclusions
We use high speed camera to shoot the vibration of micro machined gyroscope so that the video can be decomposed to a series of sequential images.Through analysis with ROI and SURF,the movable element of the video can be tracked and also the displacement curve can be obtained quite accurately. And the resonant frequency,bandwidth,damping ratio-factor can be obtained on this basis.SURF①need less computation than traditional template matching,②is faster and more accurate than mean shift,③ can achieves sub-pixel precison,and④is more suitable for precision measurement.
SURF can track the moving target in images,stitch image and registrate image and also do the non-contact measurement based on the image.The precision of the measurement can be improved greatly.
[1]Li Zhi,Wang Xiangjun.MEMS measurement technologies and methods[J].Optics and Precision on Engineering,2003,11(1):37-42.(in Chinese)
[2]Rembe C,Muller R S.Measurement system for full three-dimensional motion characterization of MEMS[J].Journal of Microelectro Mechanical Systems,2002,11(5):479-488.
[3]Hemmert W,Mermelstein M S,Freeman D M.Nanometer resolution of three-dimensional motions using video interference microscopy[J].Journal of Microelectromechanical Systems,1999(9):17-21.
[4]Gao Shiqiao,Liu Haipeng.MEMS force[M].Beijing:National Defense Industry Press,2008:222-279.(in Chinese)
[5]Jiang Ming,Yang Fujun,Dong Eliang,et al.Analysis of mechanical characteristics in the double linear vibratory gyroscope using high speed photography[J].Optics and Precision on Engineering,2006,14(1):121-126.(in Chinese)
[6]Yang Junjin,Wang Jialin.Research on fast image matching algorithm and its implementation on DSP[J].Measurement & Control Technology,2009,28(8):29-32.(in Chinese)
[7]Keinosuke Fukunag.The estimation of the gradient of a density function,with applications in pattern recognition[J].IEEE Transactions on Information Theory,1975,IT-21(8):32-40.
[8]Cheng Yizong.Mean shift,mode seeking,and clustering[J].IEEE Transactions Pattern Analysis and Machine Intelligence,1995,17(8):790-799.
[9]Comaniciu D,Meer P.Mean shift:a robust approach toward feature space analysis[J].IEEE Transactions Pattern Analysis and Machine Intelligence,2002,24(5):134-135.
[10]Comaniciu D,Ramesh V,Meer P.Real-time tracking of non-rigid objects using mean shift[C]∥2000 IEEE Computer Society Conference on Computer Vision and Pattern Recognition(CVPR'00).Hilton Head,South Carolina:IEEE Computer Society,2000(2):2142.
[11]Zhao Qian,Yuan Jianquan,Lu Xinping,et al.Moving object tracking algorithm based on object estimation and mean shift theory[J].Infrared and Laser Engineering,2010,39(6):1152-1156.(in Chinese)
[12]Song Xin,Shen Zhenkang,Wang Ping,et al.Application of mean shift method in target tracking[J].Systems Engineering and Electronics,2007,29(9):1405-1409.(in Chinese)
[13]Liu Jiyan,Pan Jianshou,Song Xin,et al.Mean-shift tracking algorithm combined with Kalman filter[J].Computer Engineering and Applications,2009,45(12):184-186.(in Chinese)
[14]Wen Zhiqiang,Cai Zixing.Convergence analysis of mean shift algorithm[J].Journal of Software,2007,18(2):205-211.(in Chinese)
[15]Li Wenwang,Wang Lingyun.Vibration measuring methods of micro-machined tunning gyroscope[J].China Measurement & Test,2011,37(1):10-13.(in Chinese)
[16]David G Lowe.Distinctive image features from scaleinvariant keypoints[J].International Journal of Computer Vision,2004,60(2):91-110.
[17]Bay H,Ess A,Tuytelaars T,et al.Speeded up robust features(SURF)[J].Computer Vision and Image understanding,2008,110(3):173-180.
[18]Shi Lei,Xie Xiaofang,Qiao Yongjun,et al.Reserch on a face tracking technology based on SURF algorithm[J].Computer Simulation,2010,27(12):227-230.(in Chinese)
[19]Luo Sanding,He Junyao.Mosaic algorithm of image based on SURF and KLT track[J].Computer Engineering,2010,36(1):215-217.(in Chinese)
[20]Zhang Ruijuan,Zhang Jianqi,Yang Cui.Image registration approach based on SURF[J].Infrared and Laser Engineering,2009,38(1):160-165.(in Chinese)
[21]Tong Ruqiang,Huang Yuqing,Tian Ruijuan.SURF algorithm and its detection effect on object tracking[J].Journal of Southwest University of Science and Technology,2011,26(3):63-67.(in Chinese)
[22]Luo Bing,Wang Ancheng,Wu Meiping.A drive control scheme based on phase-control for silicon micromechanical gyroscopes[J].Acta Automatica Sinica,2012,38(2):206-212.(in Chinese)
[23]Li Jinming,Zhang Wendong,Li Lin.A research on the testing method for the quality factor of capacitive microgyroscopes[J].Journal of North University of China:Natural Science Edition,2006,27(4):357-360.(in Chinese)
(Edited by Wang Yuxia)
猜你喜欢
杂志排行

Journal of Beijing Institute of Technology的其它文章
- Effects of laser beam divergence angle on airborne LIDAR positioning errors
- Large deflection of annular throttle-slices in shock absorbers
- Low-complexity transceiver design scheme based on channel null-space feedback
- Active contours with normally generalized gradient vector flow external force
- Bicycle capacity of borrowed-priority merge at unsignalized intersections in China
- Distribution of driving trajectory of passenger car in highway horizontal curves