基于S3C2410和WinCE的光伏发电跟踪控制系统
2012-06-19曹煜国
向 平,袁 博,曹煜国
(西北工业大学,陕西西安710072)
0 引 言
为提高光伏发电系统的发电量,需要提高光伏阵列吸收太阳辐射能量的能力。通常工程中采用的方法是为光伏阵列安装跟踪装置,而双轴跟踪方式是目前国内外比较流行的太阳跟踪系统装置。因此,本文从现有的研究基础上,将设计采用视日轨迹跟踪和双轴跟踪的方法,以ARM为控制核心,步进电动机为执行元件,通过对跟踪装置的水平和俯仰两个方向的控制,实现对太阳的全天候跟踪。该跟踪控制系统不仅对于大型光伏发电具有现实的意义,并能对改善和推广利用太阳能起到积极的推动作用。
1 S3C2410简介
S3C2410的CPU内核采用的是ARM公司设计的16/32位ARM920T RISC处理器。ARM920T实现了MMU(内存管理单元)、AMBA(先进的微控制器总线体系结构)总线和Harvard高速缓存体系结构,该结构具有独立的16 kB指令Cache和16 kB数据Cache,每个Cache都是由8个字长的行组成的。此外,S3C2410还集成了丰富的片上资源,开发者可以尽可能地减少外围设备部件,从而大大减少了整个系统的成本,减少了开发周期。
2 系统的硬件构成
2.1 系统的构成原理图
系统的构成原理框图如图1所示。根据天文太阳轨迹计算方法,微控制器MCU计算出太阳的高度角和方位角,转换成步进电动机转过相应角度所需的步数,通过I/O口进行脉冲和方向信号的发送至步进电动机的驱动器,驱动器进行一定的功率放大,驱动跟踪装置转动,使光伏板时刻保持与太阳的光线垂直,完成实时跟踪太阳的功能。

图1 系统构成原理图
2.2 系统硬件
系统的硬件设计方框图如图2所示。
(1)工作电压及复位电路
系统的工作电压有 1.8 V/2.0 V、5V 与 3.3 V三种。系统内核供电1.8 V/2.0 V,1.8 V 内核供时,最高工作频率为200 MHz,本系统采用2.0 V内核供电,最高工作频率可达266 MHz。独立直流5V电源供USB接口、LCD等使用。存储器和I/O口所需电压为3.3 V,可由5 V电源经过降压获得。
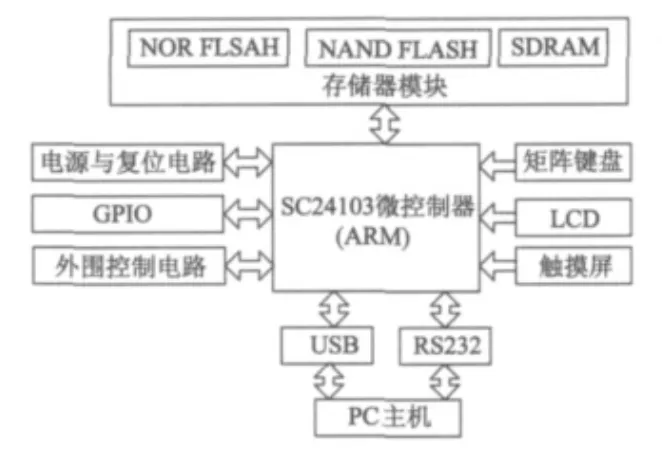
图2 系统硬件设计方框图
系统复位采用专门的复位芯片MAX708构成复位电路,且带有手动复位的引脚,稳定可靠。
(2)存储模块
系统采用了3种存储器,即:NOR Flash、NAND Flash和SDRAM。NOR Flash存储器具有速度快,数据不易丢失等特点,因此用于存放引导程序、操作系统和用户程序。NAND Flash价格低廉、数据不易丢失,考虑到用户不可对其直接操作的特点,将其作为文件存储器,用于存放系统运行时所使用的程序代码、堆栈和数据,以提高系统的运行速度。SDRAM为系统内存,主要用于执行主程序。
(3)人机交互模块
液晶显示器(LCD)、触摸屏、矩阵键盘构成了系统的人机交互模块,液晶显示和触摸屏部分用于显示系统的状态信息,键盘用于进行手动校正或系统的复位。S3C2410集成了256K色的TFT LCD(薄膜场效应晶体管)控制器,系统采用分辨率为320*240,3.5英寸TFT液晶屏,带有触摸屏功能。键盘选用4*5矩阵小键盘与控制器的I/O口相连。
(4)通用I/O口
S3C2410具有24通道外部中断源和117个通用输入输出口(GPIO)引脚,分为8组,即 PORTA(GPA)~PORTH(GPH)。8组I/O口按照其位数不同,可分为:1个23位输出口(PORTA),2个11位I/O口(PORTB和 PORTH)),4个16位 I/O口(PORTC、PORTD、PORTE、PORTG),1 个8位 I/O 口(PORTF)。为满足不同系统设计的需要,可以很容易地通过软件对这些I/O口进行配置。本系统选用端口PORTF(GPF),包括管脚GPF0~GPF7,由于只需四个端口即可完成系统的功能,因此选用GPF0~GPF3作为控制信号。
(5)其它
本系统选用了一个USB1.1 HOST接口和一个USB1.1 Device接口,USBDevice口与PC机相连,可与PC机进行通信。在烧写Flash的时候,可通过USB下载,速度要比串口快得多。应注意的是在采用USB下载时,需保证USB连接好,如不能下载需将USB重新插拔。
2.3 步进电机驱动电路设计
本系统选用的步进电机为两相四线型的永磁感应式,其型号为 130BYG系列,配套驱动器为SH20822M,工作电压为市电220 V,其连接采用共阴极接法(CP接 CP+,DIR接 DIR+,FREE接FREE+,共阴端分别接 CP-、DIR -、FREE-),如图3所示。步进电机单步走角为1.8°。

图3 步进电动机与驱动器连接
通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。方向电平信号DIR由端口GPF1和GPF3来控制步进电动机的旋转方向;脉冲个数CP由端口GPF0和GPF2给出;脱机电平信号FREE,本系统不需要此信号功能,所以此端不接,悬空。此外,由于S3C2410的I/O输出高电平为3.3 V,而SH20822M驱动电压为5 V,两者电平无法兼容,因此设计了3.3 V转5 V电平转换电路,保证控制器驱动电机正常工作。其实现电路如图4所示。
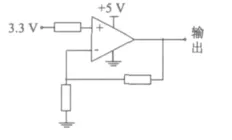
图4 电平转化电路
3 系统的软件构成
基于WinCE 6.0的嵌入式系统采用4层体系结构,具有层次性强、可移植性好、组件可裁剪、强调编程接口和支持上层应用等特点。光伏发电跟踪控制系统从下而上可分为4层:硬件平台、驱动程序、WinCE 6.0操作系统和应用程序。具体系统架构如图5所示。软件部分主要分为操作系统内核的定制、应用程序的开发。

图5 系统架构
WinCE 6.0是微软开发的、可升级的32位嵌入式操作系统,具有模块化、结构化和基于Win32应用程序接口以及与处理器无关等特点。Visual Studio2005专业版作为WinCE 6.0的一部分一并被推出,而Visual Studio 2005专业版包括一个被称为Platform Builder的功能强大的插件,可作为嵌入式平台的“集成开发环境(IDE)”。本文就是选用WinCE 6.0+VS2005为开发环境,两者的结合可满足控制跟踪系统的实时性、稳定性的要求。
3.1 WinCE 6.0 内核的定制与移植
本系统所需的操作系统是通过对WinCE 6.0系统结构进行配置与裁剪后安装运行在ARM9硬件平台上的,其定制与移植过程大致简述如下。
首先,确保PC机上已安装好WinCE 6.0开发环境,利用其生成的开发工具Platform Builder进行操作系统IDE的定制,且附带有基于WinCE 6.0平台的所有创建、设计、编译、测试和调试等一体的其它开发工具。
其次,创建板级支持包(BSP)即OAL层、Boot Loader和驱动程序的开发。再者,下载官方的EBOOT(在开发的过程中使用EBOOT,可以提高开发效率),加载 BOOTLOADER的 Startup函数,EBOOT依次调用函数 OEMDebugInit()、OEMPlatformInit()、OEMPreDownload()、OEMLaunch()完成内核的初始化工作。最后,加载系统所需的驱动程序,如系统终端和系统时钟驱动、实时时钟驱动、USB驱动、液晶(LCD)驱动和触摸屏驱动等。
WinCE 6.0内核的定制与移植以及相应驱动程序详细过程这里不再赘述,应用程序的开发是在Platform Builder导出的软件开发工具包(SDK)上进行的,采用C/C++语言编写。
3.2 应用程序开发
系统应用软件方框图如图6所示。包括系统初始化模块、高度角和方位角计算模块、步进电动机驱动模块以及人机界面模块等。采用面向对象方法,按照模块化结构进行系统应用程序的设计与开发。
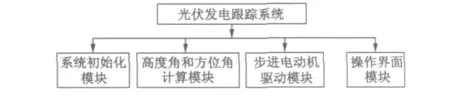
图6 应用软件方框图
(1)系统初始化模块
该模块的主要作用是确定机械装置的基准位置以及控制机械装置的行程和限位保护。将精密限位开关安装在系统高度角和方位角方向的零点位置,当机械运动到基准位置的时候,通过触发开关向控制器端口发送切断信号,控制器接收到信号后,立即终止脉冲信号的发送。这种模式主要是针对系统工作异常和复位自动返回基准零点位置而设置的,此外,也可以同时减小因机械结构加工和步进电动机传动所产生的误差累计。
(2)高度角和方位角计算模块
该模块根据太阳运行轨迹的算法,由当地的地理位置和标准时间来确定太阳每时每刻的位置,且由相应的公式可得出。在实际应用中,手动输入当地地理纬度,当地时间则由高精度控制器的时钟模块来提供,以保证系统的准确定位和跟踪。
(3)步进电机驱动模块
步进电机是一种用电脉冲信号进行控制,并将电脉冲信号转换成相应角位移的控制元件。驱动模块是控制器与步进电动机的接口,三者共同作用实现双轴的转向、转角和转速的控制。对于本系统的驱动器而言,转向取决于控制器送出的方向电平的高或低,转角取决于控制器送出的步进脉冲的个数,而转速则取决于控制器发出的步进脉冲之间的时间间隔。
本系统的主程序完成实时太阳高度角和方位角的计算,并对高度角和方位角按照每累计1.8°发出一次脉冲信号,这样既可以满足步进电动机参数,又不会累计误差。并且对于水平方向进行20细分,俯仰方向进行10细分,使步进电动机的控制精度进一步提高,又能降低电机低频振荡。控制器端口按照步进电动机稳定工作的脉冲频率200 Hz发出脉冲信号,同时发送方向电平来控制跟踪装置的运动方向,送至SH2088M驱动步进电动机按照控制策略运动。其控制程序主流程图如图7所示。
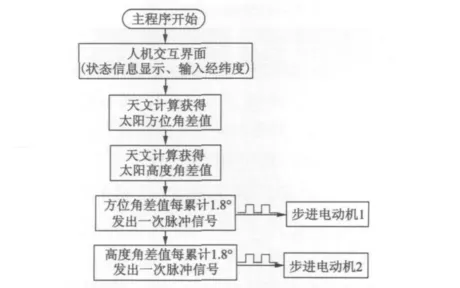
图7 控制程序主流程图
(4)人机交互界面
系统的人机交互界面是在WinCE 6.0提供的图形界面服务下开发的,由图形化窗口与事件子系统(GWES.EXE)实现。可在此界面通过设置相应的参数进行手动校正和异常复位,还可以显示太阳的高度角和方位角及时间等状态信息。其显示界面如图8所示。
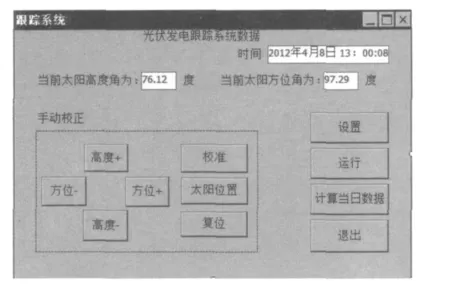
图8 系统显示界面
4 结 语
本文以S3C2410与WinCE 6.0为硬软件平台,以步进电动机为执行元件,完成了光伏发电跟踪控制系统的整体功能设计,整个系统能满足系统微型化、高性能和实时性的要求,而且还可以对光伏发电系统其它功能进行扩展,具有很好的推广性。
[1]Stine W B,Harrigan R W.Solar energy fundamentals and design[M].New York:John Wiley,1985.
[2]饶鹏.两纬程控太阳跟踪器控制系统的研制[J].控制工程,2004,11(6):542 -545.
[3]窦伟.跟踪式光伏发电系统研究 [J].太阳能学报,2007,28(2):169-173.
[4]尤金正.太阳自动跟踪系统的设计[J].现代电子技术,2009(19):139-142.
[5]Cucumo M,Kaliakatsos D,Marinelli V.General calculation methods for solar trajectories[J].Renewable Energy,1997,30(3):223-234.
[6]何宗建.Windows CE嵌入式系统[M].北京:北京航空航天大学出版社,2006.
[7]周立功.ARM & WinCE实验与实践 - 基于 S3C2410[M].北京:北京航空航天大学出版社,2007.
