无人机摄影测量在公路选线上的应用研究
2012-06-13金伟娜燕樟林
吴 磊,金伟娜,燕樟林
(浙江华东测绘有限公司,浙江杭州 310030)
0 引言
随着电子技术的飞速发展,轻型无人机在远程遥控、续航时间、飞行品质上有了明显的突破,成为近几年兴起的新型航空遥感手段,特别是飞行自动控制、数字传感器小型化等关键技术的突破以及国家低空空域有序开放的政策调整[1],为低空无人机航测技术的发展带来了新的契机。
无人机航摄系统具有全天候、全天时、低成本等技术优势,其获得的高分辨率影像数据可应用于多个领域,适合于我国信息化发展的需要[2]。无人机航摄系统是传统航空摄影测量手段的有力补充,具有灵活机动、高效快速、精细准确、作业成本低等特点,在小区域和飞行困难地区高分辨率影像快速获取方面具有明显优势。
测区位于四川省会东县境内,与云南省巧家县隔金沙江相望。测区全长约85 k m,纵跨宁南县葫芦口镇、华弹镇,会东县崇兴街、鲁吉街、溜姑、下海子、野牛坪等乡镇,区域内地形复杂,高差比较大。由于测区高差比较大,带状地形,且面积比较小,利用普通大飞机获取影像数据很不方便并且成本比较高,而无人机具有独特优势,可以很好地应用于这种小面积的带状地形,并可以在保证成图精度的情况下缩短作业周期,降低作业成本,提高作业效率。
本文主要探讨无人机航摄系统在带状公路选线上的应用,利用无人机航摄系统获取航摄影像数据,通过数据处理与采集为白鹤滩水电站库区带状公路选线提供1∶2000地形图和正射影像图D OM成果,以方便设计部门根据地形图并结合正射影像图科学、合理、高效地确定白鹤滩库区公路的走向。
1 无人机航摄系统的组成
1.1 定义
无人机主要有固定翼无人机、无人驾驶直升机和无人驾驶飞艇等种类。飞行器结构简单、使用成本低。无人机摄影测量是综合利用先进的无人驾驶飞行器技术、摄影测量传感器技术、遥控程控技术、通讯技术、GPS差分定位技术的摄影测量应用技术,能自动化、智能化、专用化快速获取国土、资源、环境等空间信息,并完成摄影测量数据处理、建模和应用分析。其工作原理如图1所示。
1.2 系统硬件组成
无人机航摄系统硬件设备主要包括飞行平台(图2所示)、飞控系统、地面监控系统、任务设备、数据传输系统、发射与回收系统、地面保障设备。无人机航摄系统以无人机为飞行平台,主要由机体、动力系统、执行系统、电气系统、起落架及其它保证飞行平台正常工作的设备和部件组成;飞控系统主要由飞控板、惯性导航系统、GPS接收机、气压传感器、空速传感器、转速传感器等部件组成;地面监控系统主要由无线电遥控器、监控计算机系统、地面供电系统以及其监控软件等组成;任务设备主要由数码相机、数码相机控制系统以及有关的装置组成;数据传输系统分为空中和地面两部分,均包括数传电台、天线、数传接口等;发射与回收系统分为无人机发射系统部分和回收系统部分;无人机航摄系统的地面保障设备分为运输保障设备和业务运行保障设备。
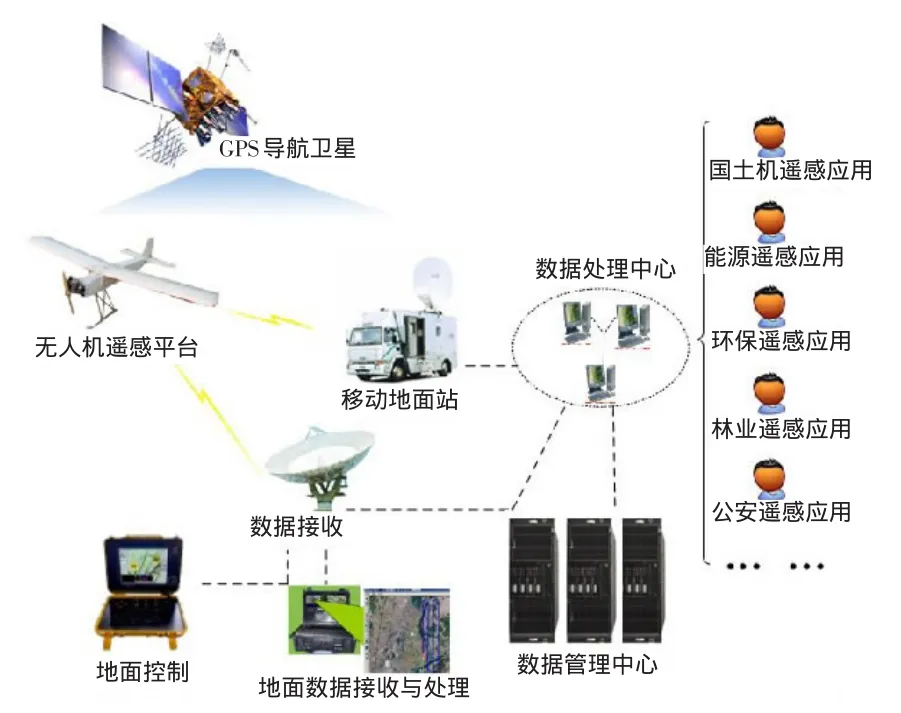
图1 无人机航摄系统工作原理Fig.1 The working principle of UAV aerial system

图2 无人机航摄系统飞行平台Fig.2 The flying platform of UAV aerial system
1.3 配套软件
目前的无人机航摄系统多使用小型数字相机(或扫描仪)作为机载遥感设备,与传统的航片相比,存在像幅较小、影像数量多等问题。针对其影像的特点以及相机定标参数、拍摄(或扫描)时的姿态数据和有关几何模型对图像进行几何和辐射校正,采用相应的软件进行交互式的处理。同时还有影像自动识别和快速拼接软件,实现影像质量、飞行质量的快速检查和数据的快速处理,以满足整套系统实时、快速的技术要求。
2 无人机航摄系统内外业作业流程
无人机航摄系统的作业流程主要包括外业和内业工作两部分,如图3所示。其中外业工作主要有测区现场踏勘、航线设计、无人机航拍获取影像数据、影像数据现场质量检查、像控点量测、调绘等;内业工作主要包括影像数据预处理、空中三角测量、DLG采集、外业调绘成果内业编辑、生成DEM和制作正射影像等。

图3 无人机航测内外业作业流程Fig.3 The indoor and field workflow of aerial photogrammetry
3 无人机航摄成图具体实例
无人机航测成图实例包括航摄资料概况介绍、外业像控点布设与量测、空中三角测量、内业测图与编辑、DEM和DOM制作等。
3.1 航摄资料概况
测区位于四川省会东县境内,与云南省巧家县隔金沙江相望,属高山峡谷侵蚀地貌。本线路为南北走向,北起宁南县葫芦口镇,南至会东县野牛坪乡甘盐井村,全长约85k m。区内地形复杂,气候多变,地质环境脆弱,泥石流等灾害频发,交通不便。测区地理位置如图4所示。

图4 测区地理位置图Fig.4 The block location map
3.2 外业像控点布设与量测
根据实测要求和成图比例尺,外业要求采取区域网布设方案。具体的区域网布设原则是:平高区域网航线数一般为4条,且每条航线的基线数应为20条左右。该测区共分五个区域,布设像控点177个,像控点测量起始点采用D级GPS控制网资料。像控点平面位置测量,原则上采用RTK进行测量,因地物遮挡等原因对采用RTK测量确有困难的区域,可采用全站仪施测或直接在首级GPS点上引点等方法测定,像控点高程测量采用GPS二次曲面拟合高程方法测定。像控点坐标采用初始化观测两次固定解求平均值,整理后与刺点图一起提交内业加密。
3.3 空中三角测量
空中三角测量是摄影测量的关键步骤,它利用少量地面控制点将整个区域网连接成一个整体,通过区域网平差计算一个测区中所有影像的外方位元素和所有加密点的地面坐标[3],应用于模型定向以及后续4D产品的生产。空中三角测量是摄影测量内业工作的核心,空三精度的高低将直接影响到摄影测量的成图精度,甚至会导致内业成图无法进行。
本测区采用全数字摄影测量系统Pixel Grid(简称PG)自动空三加密模块,并结合Virtuo Zo AAT进行光束法区域网平差,将外业控制点成果数据导入系统,得到外方位元素和加密点成果。整个空中三角测量加密过程包括收集资料及数据准备,原始航片畸变纠正,建立测区并输入测区参数、相机参数及像控点坐标,建立影像列表,内定向,确定航带连接点布局并确定航带偏移量,自动转点,PATB平差模块自动挑粗差,交互式编辑、补缺,量测外业控制点,PATB平差结算,符合限差后即可获取空三加密成果。具体流程如图5所示。

图5 空三流程Fig.5 The workflow of AT
3.4 地形图测量、DOM制作
无人机摄影测量适用于大比例尺的地形图测量。在加密精度满足1∶2000情况下在Virtuo Zo中进行立体采集,立体测图时定向精度满足1∶2000测图要求。采集时按地物、地貌先后全要素采集。为了提高测区高程精度,以野外补测、检测高程为依据,对航测内业高程点进行区域线性拟合,使测区高程误差逐渐趋于最小,可以得到满足规范精度要求的地形图成果,如图6所示。接着就可以利用采集得到的地形图制作DEM,然后基于DEM做正射纠正生成正射影像DOM,如图7所示。

图6 1∶2000地形图Fig.6 1∶2000 topographicmap

图7 1∶2000正射影像图Fig.7 1∶2000 DOM
3.5 成果精度分析
空三加密完成后,输出空三成果,具体精度如表1所示,均满足相关规范精度指标。将符合规范限差要求的Pixel Grid工作站空三加密成果在Virtuo Zo摄影测量工作站中恢复,重建测区,将内业立体测图工作转移到Virtuo Zo测图系统完成。为更好地验证地形图精度,采用RTK结合全站仪在测区量测地物点的方式对地形图成果进行检查,外业共量测了422地物点,其中点位平面中误差为±0.51 m,高程中误差为±0.46m,均满足相应规范的要求。
无人机摄影测量虽然有其独特的优势,但由于飞行平台不稳定,且携带的为非量测相机,致使所得成果高程精度稍差。为更好地提高精度,本项目通过外业在测区均匀量测特征点并再沿公路中心线量测特征点的方式对DLG成果进行纠正和编辑,以生成正式的地形图。

表1 空三加密精度情况表Table 1:The accuracy table of AT
4 无人机摄影测量技术应用在公路选线上的优势
无人机摄影测量技术同传统航空摄影测量技术相比,应用在公路选线上的优势主要体现在以下几个方面:
(1)获取周期短。传统航空遥感技术,由于受客观条件限制,不能及时获取目标区的影像数据。传统航空摄影测量技术需要办理空域飞行申请,数据的采集同样受军方和民航的制约,有时候一个申请就需要一个月的时间办理,不能够保证数据的时效性,严重影响了数据的使用效率,比如工期比较短的项目和目标区的变化检测等。而无人机是低空飞行,对空域申请要求限制较小,只要注册就可以飞行,可保证数据采集的及时性和连续性。
(2)成本低,机动灵活,影像实时传输,比较适合小面积大比例尺的公路选线项目,对于地形复杂的高危地区测绘,优势比较明显;能够定点起飞、降落,对起降场地的条件要求不高,而且不需要专门的机场和飞行员,能够比较灵活地选择起飞降落的地点,一旦有适合航飞的天气,则可以立即进行航飞。
(3)数据分辨率高。由于无人机飞行高度一般在1 000m以下,其携带的高分辨率传感器可以获取最高为厘米级的分辨率影像数据,可以满足各种比例尺的测图和监测需要。利用无人机航摄系统可以获取高分辨率的彩色影像数据,能够丰富地表达测区内的微小细节,可以为地质、规划设计、监测等部门提供直观的带有丰富细节的可量测性影像成果;通过生成DEM和DOM,以此为基础可以实现三维场景漫游和添加矢量数据,设计部门不用亲临实地即可感受测区实际概况。
5 结语
无人机航摄系统是传统航空摄影测量手段的有力补充,具有灵活机动、高效快速、精细准确、作业成本低等特点,对起降场地要求不高且不需要专门的机场和飞行员,一旦有适合航飞的天气就可以立即进行航拍,能够缩短航拍时间,从而缩短工期并节省成本,因此,通过无人机航空摄影测量技术能够为设计部门公路选线提供满足精度要求的地形图成果,非常适于为带状公路选线提供服务。利用该技术能够快速、高效、低成本提供地形图和正射影像图,通过地形图可以生成数字高程模型DEM,然后在DEM上叠加正射影像图即可进行三维漫游和添加矢量数据,使设计部门在办公室里就能亲身感受到测区实地的场景,从而使公路选线的决策更加准确、实时、科学合理。因此探讨无人机摄影测量技术在带状公路上的应用具有十分重要的意义,能够使公路选线更加科学合理,有助于我国公路选线的正规化和信息化,能够为我国公路建设做出应有的贡献。
[1]曹三明,夏兴华.民用航空法释义[M].沈阳:辽宁教育出版社,1996.
[2]刘先林.摄影测量与遥感技术的最新进程[R].郑州;信息工程大学测绘学院,2006.
[3]张祖勋,张剑清.数字摄影测量学[M].武汉:武汉测绘科技大学出版社,1996.
