复合式康复机械手设计
2012-06-11张杰张志军牛兴坤柴娜
张杰,张志军,牛兴坤,柴娜
(沈阳理工大学 机械工程学院,辽宁 沈阳 110159)
0 引言
康复机械手是源于工业机械手和医用机械手的结合,再依据于人体康复医学理论而逐步发展起来的一种新型机械手.它起源于20世纪80年代的美国,利用生物力学原理,用机器人来规范受伤肢体的运动范围,重建人体的四肢和器官功能,从而达到受伤肢体康复治疗的作用[1].
康复机器人作为医疗机器人的一个重要分支,它的研究贯穿了康复医学、生物力学、机械学、机械力学、电子学、材料学、计算机科学以及机器人学等诸多领域[2],已经成为了国际机器人领域的一个研究热点.
本文借鉴了美国和法国的新型康复机械手,自行研制了一种新型气动复合式康复机械手,用于手臂和手掌的康复治疗之用.
1 机械手结构
机械手由手臂和手掌机构、支撑机构和气体驱动机构所组成.其主要特点是将手臂和手掌两者结合在一起,利用气缸作为驱动元件,由开关、遥控和计算机分别实现控制.机械手整体结构见图1,由图可知,机械手整体结构分为手臂、手掌、支撑单元和驱动单元及控制单元.手掌单元见图中1;手臂单元见图中2;支撑单元见图中3;驱动单元见图中4;控制单元见图中5.
设计中采用了伸缩调节机构,同轴铰链机构;手臂和手掌的曲张等连杆机构,而手臂和手掌的曲张运动则分别是由霍尔开关发布指令来实现控制.

图1 气动复合式康复机械手的结构图
2 机械手控制系统
该机械手的控制系统设计考虑了家用、医院用和康复中心使用等情况,采用了三种控制方式,即开关量控制、遥控控制和计算机控制.总控制框图见图2.
2.1 开关量控制和遥控
开关量控制和遥控主要用于家庭使用.开关量控制是由4个24 V的霍尔开关、8个24 V的继电器、4个24 V的电磁铁、4个按钮开关和4个指示灯、24 V直流电源组成.

图2 控制框图
工作时先按下开关1接通电源,按开关2使手臂复位到原始位置.再按开关3控制继电器,继电器再控制电磁铁1使其气缸1的上腔进气,手臂完成向左摆动.手臂走到终点位置后,霍尔开关5动作控制电磁阀2动作,使其气缸1的下腔进气,实现手臂的换向.此后再分别由霍尔开关1和2控制电磁铁1和2来实现手臂机构的循环往复运动,来带动手臂的不断的往复运动.
手掌的往复运动时依靠开关4、霍尔开关、继电器、电磁铁3和4来实现的,其工作原理与上述类似.
遥控控制是将遥控的继电器分别接在不同的开关上,利用遥控的4个继电器来替代4个开关,其后的工作原理与开关量控制时的原理相同.
2.2 计算机控制
计算机控制是由2个通信模块、7个霍尔开关、4个电磁铁及计算机组成.此外,输入模块与霍尔开关相连,输出模块与电磁铁相连,2个通信模块的另一个端口共同的与计算机相连接,由此完成计算机的控制.
控制过程是:4个霍尔开关完成手臂和手腕的摆动指令信号输出;其余3个霍尔开关完成手臂的运动速度和摆角计算的指令信号输出;2个通信模块分别由2个单片机控制,并分别将输入信号传输给计算机和将计算机的输出信号传给电磁铁,由此完成对康复机械手的计算机控制.
计算机的控制界面是由:病志记录与查询系统,运动参数显示系统,图像记录系统和计算机开关控制系统等组成.计算机界面编写、输入和输出模块程序的编制是用VB语言.
2.3 气动系统
气体驱动机构见图1中的4,气动系统由气泵、2个电磁控单向阀、2个三位五通电磁换向阀、2个双作用气缸、1个三联件,通过有机的组合完成对手臂和手腕的驱动.气动原理图见图3.

图3 气动控制原理图
3 机械手的运动学分析
由图1可知手臂机构是由二段连杆组成,手掌机构是由三副连杆和手掌支撑模块组成.手臂机构和手掌机构可以各自独立的运动,也可以实现联动.在设计中手臂和手掌间的各连杆点的空间位置决定了整个机构空间的尺寸大小.
按D-H方法对每一连杆建立坐标系.坐标系O0X0Y0Z0是固定在小臂上的坐标系,称为基础坐标系.以小臂所在直线为轴X轴,腕关节的轴线为Z轴,Y轴通过右手螺旋法则确定坐标系O1X1Y1Z1.同理可以建立手的坐标系.机械手位姿图见图4.
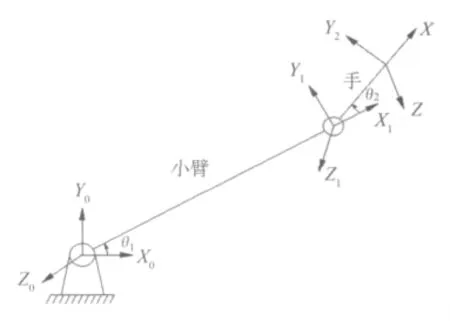
图4 手臂和手位姿图
设计中将手掌机构嵌入小臂的连杆机构中,并用齐次变换矩阵来描述连杆坐标系之间的相对位置和方向[3].以成人人体手臂骨骼构成为依据,检验设计尺寸的正确与否.
齐次变换矩阵记为 A,见式(1)[4].A 矩阵是用来描述连杆机构坐标系之间相对平移和旋转的齐次变换.由图4可知,连杆1为手臂,连杆2为手.相邻坐标系i和i-1的D-H变换矩阵为

式中,i为连杆编号;αi为连杆扭角;θi为关节变量;di为连杆间距.
由图4可列出机械手连杆D-H参数,见附表.

附表 各杆D-H参数和关节变量表
第i坐标系相对于基坐标系的位姿齐次矩阵Ti是各坐标系变换矩阵Ai的连乘积[4],则图4中连杆2坐标系O2X2Y2Z2的位置和姿态的运动学方程为

式中,A1是描述手臂坐标系(O1X1Y1Z1)相对于基坐标系(O0X0Y0Z0)的位姿矩阵;A2是描述手坐标系(O2X2Y2Z2)相对于手臂坐标系的位姿矩阵.
再由表1参数得
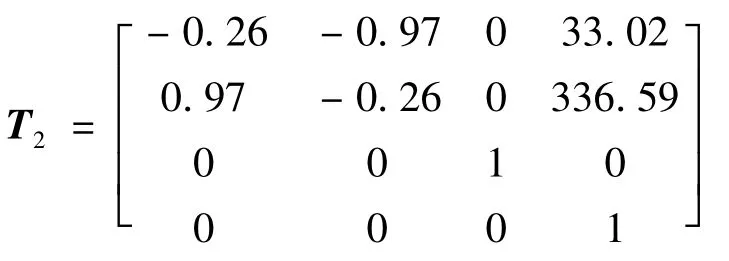
可知,

由人体手臂工作空间[5]可知,手的位置和姿态在人体工作空间范围之内.
4 结论
(1)复合式康复机械手设计符合人体生理结构,适合于手臂、手掌的康复运动训练;
(2)康复机械手采用气缸驱动,具有动作可靠、安全、环保、动作柔顺等特点;
[1]杜志江,孙传杰,陈艳宁.康复机器人研究现状[J].中国康复医学杂志,2003,18(5):293-294.
[2]COLOMBO R,PISANO F,MICERA S,et al.Robotic techniques for upper limb valuation and rehabilitation of stroke patients[J].IEEE TIrans Neural Syst ehabiI Eng,2005:13(3):311-324.
[3]蔡自兴.机器人学[M].北京:清华大学出版社,2000:46-47.
[4]龚振邦,陈振华,钱晋武,等.机器人机械设计[M].北京:电子工业出版社,1995:64-68.
[5]中国标准化与信息分类编码研究所.工作空间人体尺寸[OB/OL].http://dbpub.cnki.net/grid2008/dbpub/,2008.
