基于DSP的开关磁阻电机调速系统研究与设计
2012-06-09陈运军
陈运军
(四川信息职业技术学院 四川 广元 628040)
开关磁阻电机是随着现代电力电子技术、控制技术的发展而出现的一种新型电机,具有结构简单、成本低廉、起动转矩大及调速范围宽等优点,具有很好的发展前景,已在工业生产中得到了广泛的应用,被认为是在未来具有很强竞争力的一种调速电机。
开关磁阻电机的转子与定子都是凸极结构,即双凸极结构。转子和定子铁芯都由硅钢片叠压而成,转子极上无绕组,定子极上安装有集中绕组,转子、定子极对数不相等。
开关磁阻电动机调速系统(SRD)主要由4部分组成,包括开关磁阻电机(SRM)、功率变换器、采样反馈环节和控制器。SRM是实现机电能量转换的部件,也是此系统区别于其他电动机调速系统的最主要标志[1]。
功率变换器提供开关磁阻电机运行所需要的能量,一般是由蓄电池或交流电经整流后得到的直流供电。采样反馈环节包括电流检测和位置检测。控制器是整套调速系统的核心,处理反馈信号包括转子位置和电流反馈信息,计算转速,然后发出控制信号给功率变换器,实现功率变换器对开关磁阻电动机的驱动。
通过对以上4部分的控制,可很好的对开关磁阻电机调速进行控制,提高电机运行的稳定性和可靠性。
1 机电设备检测终端系统硬件设计
整个系统采用TI公司的电机控制专用芯片TMS320LF 2812作为控制核心,系统的设计主要分为2大部分:上位机与下位机设计,本设计主要研究下位机部分设计,包括软、硬件部分。系统的软件设计基于DSP专用调试软件CCS平台用C语言编程,以完成开关磁阻电机各种控制算法。硬件设计部分包括:主电路功率变换器拓扑结构的选择和吸收电路的设计、电流采样部分的设计、位置检测环节的设计、功率开关器件驱动电路的设计以及保护电路部分的设计等。
1.1 系统总体设计
图1所示是本设计的开关磁阻电机调速系统的总体框架图。主要包括上位机、SRM本体、功率变换、控制系统以及信号采样部分五个环节;软件主要实现位置计算、速度估算、PI控制等功能。虚线框内表示系统使用到的DSP芯片的模块和软件中所需要实现的功能。系统总体设计方案如下:上位机PC与下位机通过RS232串行接口进行通讯;功率变换系统主要包括不对称桥式电路和桥式电路,采用IGBT作为功率开关器件,IGBT模块内部自带的二极管作为续流二极管,用EXB841作为IGBT的驱动芯片;控制器核心采用TI公司的电机控制专用芯片TMS320LF2812。系统的主电路电源采用三相交流电通过三相不控制整流获得直流电源,系统的控制电源部分采用5 V、±15 V和24 V开关电源供电。
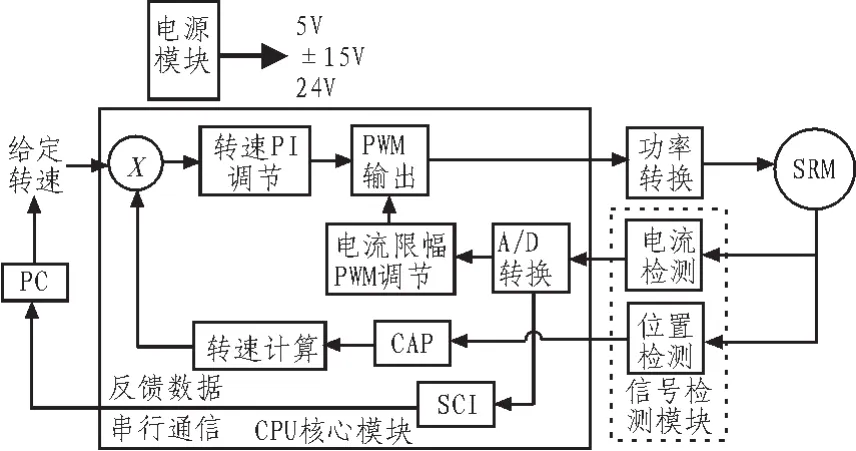
图1 系统总体结构图Fig.1 Structure diagram of the power control unit test system
主控制系统是将TMS320F2812核心系统、电流速度反馈系统、IGBT驱动系统、触摸液晶屏等连接构成一个完整的系统并根据需要留有扩展接口以满足日后对系统的升级和更新。电源芯片采用TI公司的双路输出低压降稳压器TPS767D301,可以输出3.3 V和1.8 V电压供给TMS320F2812使用,每个通道均可输出高达1 A的电流。同时具有1.8 V同核延时200 ms供电的能力,是为TMS320F2812芯片设计的专用电源芯片。
1.2 IGBT驱动系统设计
驱动系统需要实现将TMS320F2812输出的PWM信号进行隔离、放大并最终驱动IGBT工作;其次需要根据电流、速度反馈信号输出的过流信号对IGBT驱动信号进行封锁;最后可以根据IGBT集电极与射极之间的电压检测IGBT过流情况并将故障信号反馈给DSP。根据这一设计思路,首先选择IGBT的驱动芯片EXB841,该芯片可以将低电平0 V的信号放大为0.5 V,将高电平5 V的信号放大为15 V。芯片内部集成有光耦隔离电路,可以将PWM信号与强电进行隔离。驱动信号频率可以达到40~50 kHz,采用单电源供电,内部可以产生一个-5 V反偏压。本系统SRM为三相电机,所以需要4个隔离电源对EXB841进行供电,3个上桥臂分别使用3个独立的隔离电源进行供电,3个下桥臂使用一个独立的隔离电源进行供电。由于TMS320F2812的通用I/O引脚的带负载能力较小,因而在系统设计中需要对TMS320F2812输出的PWM信号进行缓冲。本设计中为了在故障时可以封锁DSP产生的PWM信号,将PWM信号与故障信号与后作为EXB841的输入信号,同时将7路故障信号相与,送到延时电路进行处理,最后送给DSP。
1.3 功率变换电路设计
系统的功率变换系统包括不对称功率电路和桥式电路。三相380 V交流电经过不控整流得到直流电作为功率变换器主电路供电电源,选用富士公司生产的6R1100G-160(100 A/1 600 V)不控整流模块;功率变换系统的功率开关器件选用富士公司生产的2MBl25L.120模块(两相模块25 A/1 200 V);IGBT模块内部自带的二极管作为各相绕组关断时的续流二极管;供电电源上二并二串4个稳压滤波电容(3 300 μF/400 VDC),在每个电容上并联一个 30 kΩ 的水泥电阻,用来保证每个电容上电压的相等。
开关磁阻电动机调速系统运行在额定工作条件下,其主开关元件IGBT需要在高电压、大电流的环境下不断切换,因此是整个系统最脆弱的环节之一。所以为保证整个系统正常运行,保护主开关器件,要使用缓冲电路保护每个主开关器件[2]。这里采用最常用的一种Snubber电路,它由一个电阻与一个二极管并联,再与一个高压电容串联,如图2所示。IGBT与Snubber电路并联构成成最简单的IGBT保护吸收电路,在这个电路中并联电容Cs。将降低IGBT关断时的损耗,并改善其在反偏压工作条件下关断时的伏安特性;电阻Rs为漏感储能的释放电阻;VD可以避免IGBT开通时电容的突然放电,以减小开通时的负担。
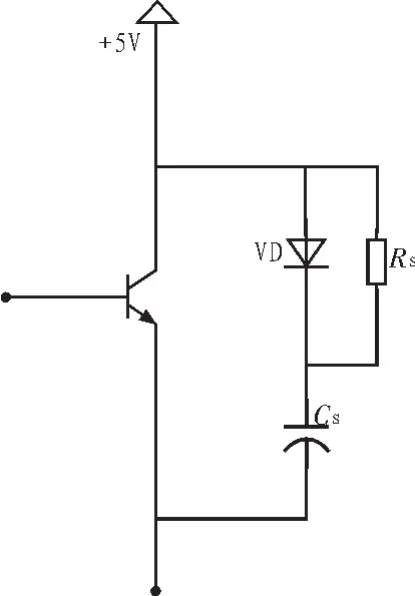
图2 Snubber吸收缓冲电路Fig.2 Snubber absorption buffer circuit
1.4 电流与位置检测电路设计
系统中的电流采样环节通过霍尔电流传感器实现,使用莱姆公司生产的LA58.P。系统中需要3个霍尔电流传感器分别检测三路相电流。位置信号的反馈电路设计将强电与DSP之间的电源进行隔离,本设计中应用TLPl81将强电与弱电电源进行隔离[4]。
过流保护电路:为了在故障时尽快切断驱动信号,电路中设计了过流保护电路。该电路首先通过将三相电流信号线与然后进入比较器,比较值可以通过电位器进行调节。当有一相电流值大于所设的比较值后,比较器将产生一个过流信号。这个过流信号送到故障锁存电路,最后通知DSP。
2 系统软件设计
如图3所示,系统采用TMS320F2812 DSP控制开关磁阻电机的软件整体程序结构。
在程序的最高层上,包括初始化程序和主程序。初始化程序包括DSP设置、EVM初始化、控制算法参数初始化和开启中断服务程序。初始化结束后,主程序开始运行。主程序是一个无限循环程序,在主程序中主要进行转速的计算和电流转速等参数的发送[5]。
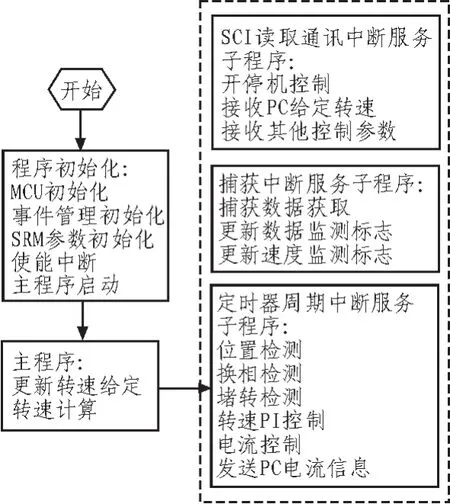
图3 系统控制整体结构Fig.3 Overall structure of system control
电机控制过程中重要的相关时间量都是经过定时器中断程序来完成的。采用定时器3周期中断程序,定时器周期频率为5 kHz。SRM在时间中断程序运用的控制算法包括转子位置计算、堵转判断、换相判断、转速PI控制、电流 PWM控制等。每一次定时器周期中断启动,首先进行一次转子位置计算并完成一次堵转判断,即执行更新转子位置和判断堵转的频率都为5 kHz。而转速PI控制、电流PWM控制和换相判断,则以频率5 kHz的五分频运行,即每5次中断这些控制控制各执行一次,其中换相判断在第一次运行,速度PI控制于第三次执行,而电流PWM控制在第五次运行[3]。DSP3个捕获单元CAPl23捕获光电编码器产生三路位置信号 (上升沿和者下降沿),每一次发生捕获,程序就会进入捕获中断服务子程序中。在捕获中断服务子程序中,程序判断哪一路发生了捕获,读取相应捕获堆栈寄存器FIFO里的数据并储存,等待位置和转速的计算子程序调用参考。接下来中断子程序更新位置标志位和转速标志位,供其它子程序进行调用(转速计算在主程序中实现,转子位置计算在定时器周期中断服务子程序中实现)。SCI接收中断服务子程序主要负责接收上位机的指令。当收到上位机的指令,进入SCI接收中断程序,根据接收的数据判断是否开机,是否关机,是否为给定转速。若为给定转速,则继续接收四位数据,即给定转速的千、百、十、个四位数据[6]。
3 试验结果分析
实验系统结构框图如图4所示。

图4 实验系统结构框图Fig.4 Experimental system structure diagram
针对不对称功率电路控制系统的实验包括给定转速一定实验,给定转速变化实验和负载改变实验。当给定转速为800 rpm时,电机启动时,转速很快达到给定转速,并略有超调,然后基本达到稳定状态。绕组电压在导通时根据PWM通断在母线电压与0 V之间切换,当关断时由于互感作用产生的感应电势波动,绕组电流在导通时接近平顶波,峰值在4 A左右。电机启动后在1.8 s左右达到给定转速并基本稳定。由于转速加快,每一相相对导通周期变短,在导通周期有些相绕组电流未达到最大值即导通结束,基本成为三角波,电流峰值在7 A左右。当给定转速变化时,实际转速值均能迅速达到新的给定值,具有较快的动态响应,但超调量比较明显,但很快稳定。当电机在26 s加载后,实际转速略有下降,电流峰值上升到15 A左右,在39 s后卸载,实际转速又上升回到给定转速附近。
4 结束语
开关磁阻电机调速系统作为一种新型的调速系统[7-8],同时具有直流调速系统和普通交流调速系统的优点,显示出强大的市场竞争力,正逐步应用于家用电器、一般工业、伺服与调速系统、牵引电动机、高速电动机以及汽车辅助设备等领域,在工业、农业以及国防等领域的应用越来越广泛。
[1]吴红星.开关磁阻电机系统理论与控制技术[M].北京:中国电力出版社,2010.
[2]曲兵妮,宋建成.开关磁阻电动机互感特性及其对转矩的影响[J].电机与控制学报,2009(3):19-23.QU Bing-ni,SONG Jian-cheng.Mutual inductance of switched reluctance motor and its effect on torque[J].Electric Machines and Control,2009(3):19-23.
[3]刘迪吉.开关磁阻电机发展及应用[J].电气技术,2006(7):22-25.LIU Qi-di.Development and application of switched reluctance motor[J].Electrical Technology,2006(7):22-25.
[4]李广海,叶勇,蒋静坪.开关磁阻电机无位置传感器技术的分析[J].微特电机,2004(7):1-3.LI Guang-hai,YE Yong,JIANG jing-ping.Analysis of indirect rotor-position detecting technique of switched reluctance motor[J].Micro motor,2004(7):1-3.
[5]任润柏.TMS320F28x源码解读[M].北京:机械工业出版社,2010.
[6]薛梅.开关磁阻电机非线性建模方法及智能控制策略研究[D].天津:天津大学,2008.
[7]马祥,高林.改进的电动钻机柴油发电机组调速系统研究[J].现代电子技术,2012(6):186-188.MA Xiang,GAO Lin.Research on improved diesel generator governor of electric rig[J].Modern Electronics Technique,2012(6):186-188.
[8]陆华颖,程光伟,陈凯.模糊PID双闭环直流电机调速系统仿真[J].电子科技,2012(8):56-58.LU Hua-ying,CHENG Guang-wei,CHEN Kai.Simulation of fuzzy PID brushless DC motor double-loop speed control system[J].Science and Technology,2012(8):56-58.
