基于串口通信的直流电机PID调速系统设计
2012-06-09曾伟钦徐东升冉志勇
曾伟钦,徐东升,冉志勇
(西南科技大学 信息工程学院,四川 绵阳 621000)
“飞思卡尔”杯全国大学生智能车竞赛以最短时间跑完赛道为目标,尽可能地使车模达到“稳、快、准”的要求,这不仅要求车模有灵敏、准确的传感器系统 ,同时直流电机调速系统的设计也显得至关重要。基于串口通信的直流电机PID调速系统采用PID控制器闭环反馈控制,通过改变PWM信号达到调速控制目的,同时采用串口与上位机进行通信使得PID参数调整方便。该系统结构简单,控制准确,稳定性高。经过不断调试和优化,该设计系统能够使智能车行驶速度和稳定性得到显著提高。
1 系统整体硬件设计
系统整体硬件设计如图1所示,主要由MCU模块、电源模块、车速检测模块、上位机、OLED显示模块、按键输入模块、PWM信号输出等模块组成。
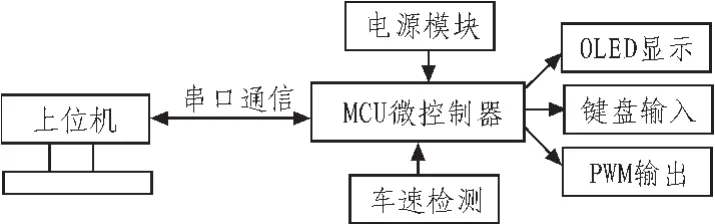
图1 系统整体硬件设计图Fig.1 Whole system hardware design
1.1 MCU微控制器模块
微控制器选用飞思卡尔半导体公司Kinetis产品中的K60系列,具有器件充电检测、硬件加密和篡改加密和篡改检测功能。器件带有丰富的模拟、通信、定时和控制外围设备,涵盖包括从256 kB闪存100引脚LQFP封装到1 MB闪存256引脚MAPBGA封装都有,高闪存密度K60系列器件包括可选单精度浮点单元、NAND闪存控制器和DRAM控制器。
1.2 电源模块
电源稳定工作是系统稳定运行的基础,本系统采用7.2 V Ni—cd蓄电池经过稳压之后分别给各个模块供电。其中3.3 V供MCU、串口、OLED显示屏工作,5 V供光电编码器工作。电源系统如图2所示。

图2 电源系统Fig.2 Power supply system
1.3 车速检测模块
在智能汽车设计中,测速传感器的设计主要有两种方案:霍尔传感器和光电式脉冲编码器。本系统采用光电式脉冲编码器可将机械位移、转角或速度变化转换成电脉冲输出,是精密数控采用的检测传感器。光电编码器的最大特点是非接触式,此外还具有精度高、响应快、可靠性高等特点。通过光电编码器采集脉冲,将采集到的脉冲数送进PID控制器进行闭环反馈控制。
1.4 OLED显示屏
有机发光二极管(Organic Light-Emitting Diode,OLED)由于同时具备自发光,不需背光源、对比度高、厚度薄、视角广、反应速度快、可用于挠曲性面板、使用温度范围广、构造及制程较简单等优异之特性,被认为是下一代的平面显示器新兴应用技术。通过显示按键输入的数值,使得调试更加方便。
1.5 PWM调速模块
随着科技的发展,PWM调速成为电机调速的新方式,并凭借它的开关频率高、低速运行稳定、动态性能优良、效率高等有点,在电机调速中被普遍运用。本系统通过MCU的PWM模块产生10 kHz的PWM信号,采用PID闭环反馈控制计算出PWM的占空比,进而控制直流电机的转速。
2 PID控制器
工程实际中,应用最为广泛调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。PID控制器问世至今已有近70年历史,它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制主要技术之一。当被控对象结构和参数不能完全掌握,或不到精确数学模型时,控制理论其它技术难以采用时,系统控制器结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便。即当我们不完全了解一个系统和被控对象﹐或不能有效测量手段来获系统参数时,最适合用PID控制技术。PID控制,实际中也有PI和PD控制。PID控制器就是系统误差,利用比例、积分、微分计算出控制量进行控制。
2.1 比例(P)控制
比例控制是一种最简单控制方式。其控制器输出与输入误差信号成比例关系。当仅有比例控制时系统输出存稳态误差(Steady-state?error)。
2.2 积分(I)控制
积分控制中,控制器输出与输入误差信号积分成正比关系。对一个自动控制系统,进入稳态后存在稳态误差,则这个控制系统为有差系统。为了消除稳态误差,控制器中必须引入“积分项”。积分项对误差取决于时间积分,时间增加,积分项会增大。这样,即便误差很小,积分项也会时间增加而加大,它推动控制器输出增大使稳态误差进一步减小,直到等于零。比例+积分(PI)控制器,可以使系统进入稳态后无稳态误差。
2.3 微分(D)控制
微分控制中,控制器输出与输入误差信号微分(即误差变化率)成正比关系。自动控制系统克服误差调节过程中可能会出现振荡失稳。其原因是存有较大惯性组件(环节)或有滞后(delay)组件,具有抑制误差作用,其变化总是落后于误差变化。解决办法是使抑制误差作用变化“超前”,即误差接近零时,抑制误差作用就应该是零。这就是说,控制器中仅引入“比例”项往往是不够,比例项作用仅是放大误差幅值,而目前需要增加是“微分项”,它能预测误差变化趋势,这样,具有比例+微分控制器,就能够提前使抑制误差控制作用等于零,为负值,避免了被控量严重超调。对有较大惯性或滞后被控对象,比例+微分(PD)控制器能改善系统调节过程中动态特性。
2.4 模拟型和数字型PID控制器
模拟PID控制器的原理如图3所示,其中r(t)为系统给定值,c(t)为实际输出,u(t)为控制量。 如图 3 所示,模拟 PID控制器的数学表达式为:

图3 PID控制器的原理Fig.3 Principle of PID controller

其中:e(t)为系统偏差量,Kp为比例系数,Ti为积分时间常数,Td为积分时间常数,式1也可以整理变形为:

其中:Kp为比例系数,Ki为积分系数 Ki=Kp/Ti,Kd为微分系数 Kd=KpTd。
计算机控制是一种离散的采样控制,在计算机控制系统中所使用的是数字PID控制器,而式(1)和式(2)均为模拟PID控制器的控制表达式。通过将模拟PID表达式中的积分、微分运算数值计算方法来逼近,便可实现数字PID控制,只要采样周期T取值足够小,这样逼近就可以相当精确。将积分项用矩形和代替,微分项用差分代替,使模拟PID离散化为差分方程,可作如下近似:

其中:T为采样周期,K为采样序号,使用这种近似方法,就可以得到数字PID位子型控制算法和数字PID增量型控制算法。
2.5 PID控制器参数整定
PID控制器参数整定是控制系统设计核心内容。它是被控过程特性确定PID控制器比例系数、积分时间和微分时间大小。PID控制器参数整定方法很多,概括起来有两大类:1)理论计算整定法。它主依据系统数学模型,理论计算确定控制器参数。这种方法所到计算数据未必可以直接用,还必须工程实际进行调整和修改。2)工程整定方法,它主要依赖工程经验,直接控制系统试验中进行,且方法简单、易于掌握,工程实际中被广泛采用。PID控制器参数工程整定方法,主要有临界比例法、反应曲线法和衰减法。两种方法各有其特点,其共同点都是试验,然后工程经验公式对控制器参数进行整定。但采用哪一种方法所到控制器参数,都需要实际运行中进行最后调整与完善,现一般采用是临界比例法。
3 系统软件设计
系统启动后,单片机进行初始化设置,包括端口初始化、OLED显示屏初始化、PWM初始化、定时器/中断初始化等。单片机检测按键状态,调用按键子函数,读取键值,将键值显示在OLED显示屏上。另一方面,键值传送到PID控制器作为其参数,通过车速检测模块采集脉冲作为反馈量,软件给定值作为输入量。PID控制器经过整定计算之后,将改变PWM占空比,从而实现直流电机的速度调节控制,系统程序流程图如图4所示。
4 系统调试与分析

图4 系统程序流程图Fig.4 System program flow chart
调试中系统由计算机控制单片机,PC机作为上位机,单片机作为下位机。通过串口与上位机进行通信,将直流电机速度传送到上位机,并用图形显示,直观的显示直流电机速度变化响应曲线,便于调试与分析。通过分析上位机显示的直流电机速度变化响应曲线图,如图5所示,图中上升部分为通过上位机给单片机发送一定的数值,直流电机速度达到这一数值的动态响应情况,稳定部分为直流电机速度恒定保持这一数值,下降部分为通过上位机给单片机发送数值0,直流电机停车过程所发生的动态响应情况。从整个响应曲线图可以得出,该系统控制直流电机调速响应时间短、控制准确,能达到系统要求。

图5 上位机测试界面图Fig.5 PC testing interface diagram
5 结 论
通过运用PWM技术和PID控制器对直流电机进行速速控制,提高了系统稳定性,调速精确,响应时间更短。用OLED显示屏和串口与上位机进行通信,显示系统的一些参数,使得调试更为方便、人性化。经过测试表明,该系统可以被推广使用,能满足一般直流电机的速度控制要求。
[1]毕晓辉,于春梅,安永泉,等.自动控制理论[M].北京:北京工业出版社,2006.
[2]康华光,陈大钦,张林.电子技术基础[M].北京:高等教育出版社,2006.
[3]王兆安,黄俊.电力电子技术[M].北京:机械工业出版社,2011.
[4]汤蕴璆,罗应力,梁艳萍.电机学[M].北京:机械工业出版社,2008.
[5]孙同景,陈桂友.Freescale 9S12十六位单片机原理及嵌入式开发技术[M].北京:机械工业出版社,2008.
[6]杨春旭,林若波,彭燕标.基于PWM控制的直流电机调速系统的设计[J].齐齐哈尔大学学报,2011(3):75-78.YANG Chun-xu,LIN Re-bo,PENG Yan-Biao.Based on PWM control DC motor speed control system design[J].Qiqihar University Journal,2011(3):75-78.
[7]金奇,邓志杰.PID控制原理及参数整定方法[J].重庆工学院学报:自然科学,2008(5):65-68.JIN Ji,DENG Zhi-Jie.PID control principle and parameters setting method[J].Journal of Chongqing Institute of Technology:Natural Science,2008(5):65-68.
[8]第七届全国大学生“飞思卡尔”杯智能汽车竞赛竞速比赛规则与赛场纪律[EB/OL].(2012-07-10).http://www.smartcar.au.tsinghua.edu.cn/web/rules.html.
