左心室辅助装置的桡动脉压信号前处理与特征识别
2012-06-08赵一平周健潘刚
赵一平,周健,潘刚
1 上海交通大学生物医学仪器研究所,上海,200030
2 上海交通大学Med-X研究院,上海,200030
3 上海交通大学医学院附属瑞金医院心外科,上海,200020
0 前言
每年约1/5的心脏病患者最终发展为心衰(heart failure),心血管类疾病正成为新的医疗重点。治疗心力衰竭的方法有药物治疗、心脏移植和心室辅助等,其中药物治疗占绝大多数,但疗效不佳,患者生活质量差,病死率高;心脏移植由于慢性排斥反应以及供体的严重缺乏等诸多因素也很难广泛开展[1];因此心室辅助装置( ventricular assist device, VAD)在临床治疗中将成为首选。
心室辅助装置的泵体主要分搏动式隔膜泵和恒流式叶轮泵两种。George V.Letsou和他的团队证明,与心脏同步工作的搏动式LVAD相比同等输出量的恒流式LVAD,能更好的降低左心室负荷并改善有效的血液循环[2]。不过,目前国内同步搏动式VAD领域的研究还较少。本文针对搏动式VAD的同步辅助,提出了一种基于有创桡动脉压的信号前处理和实时心动周期识别的方法。
1 原理与实现
桡动脉综合了心脏泵血活动规律其幅值变化与心动周期直接相关,相对心电信号桡动脉波能更直接地反应心脏的机械运动状态。图1所示的桡动脉波各参数点的意义如下:
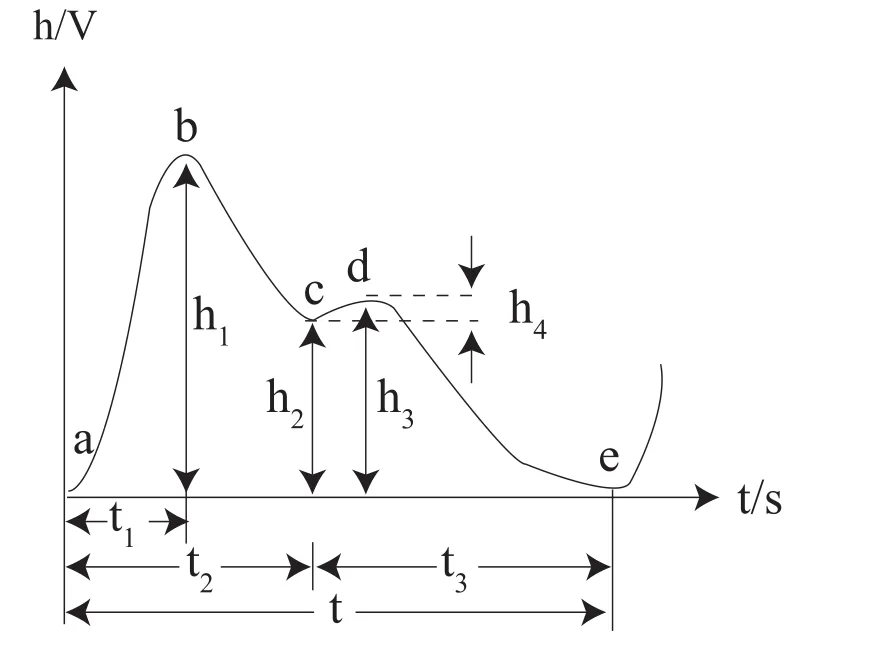
图1 标准桡动脉压[3]Fig.1 Standard radial arterial pressure[3]
t1为快速射血期;
t2为左室射血期;
t3为舒张期;
a为心动周期起点;
b为主波峰;
c为降中峡(动脉瓣开放);
d为重搏峰;
e为舒张期结束点。
1.1 桡动脉压信号前处理
从飞利浦UTAH有创式血压传感器得到的桡动脉压信号,经过有源放大器放大后,采样发现原始信号包含大量噪声。经分析,噪声主要来自传感器固有噪声、采样电路的随机噪声和工频干扰等,于是采用IIR低通数字滤波器进行平滑处理。IIR滤波器系统传递函数的极点可以位于单位圆内的任何地方,因此可以用较低的滤波器阶数来获得较高的频率选择性,相对于FIR滤波器以及时域循环平均等方法可以减少延时,减少嵌入式系统的运算开销。
原始数据来自于合作单位上海交通大学附属瑞金医院心外科监护病房。将原始数据利用Matlab做频谱分析,图2所示为其中一幅谱图分析的结果,发现桡动脉压信号谐波构成极其简单,且有用分类集中在5 Hz频点内,故将滤波器截止频率定在5 Hz处。
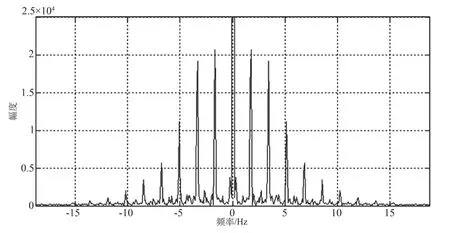
图2 桡动脉压谱分析Fig.2 radial arterial pressure spectrum analysis
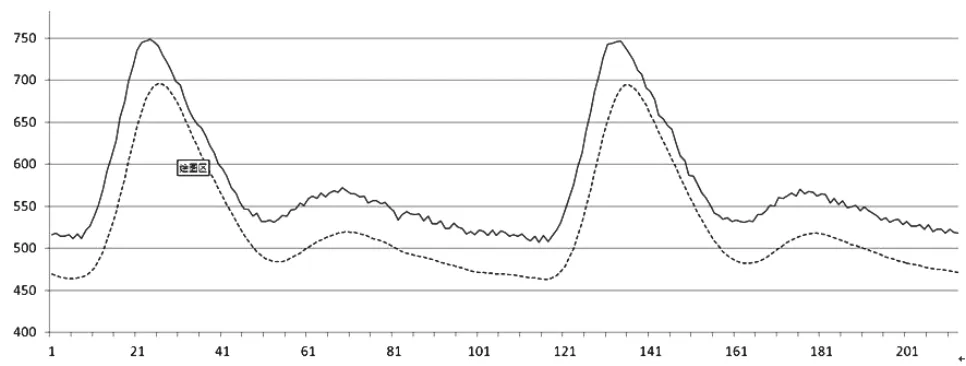
图3 原始采样信号与滤波信号对比Fig.3 Original signal and filtered signal
IIR滤波公式:

式1中X(n)为原始桡动脉采样值;y(n)为IIR滤波后结果;ai和bi为滤波器系数。
图3中上方曲线为原始桡动脉信号,下方曲线为原始桡动脉动信号经滤波后的结果。滤波器能明显去除舒张期平坦区上的噪声引入的抖动,但同时引入了少量延时。
1.2 特征点识别
1.2.1 动脉压信号及特征
在心动周期的识别中,主要关注的是动脉压信号的起始、动脉瓣开放和舒张期结束三个特征点。目前,比较常见的脉搏波特征识别主要有以下四种方法:① 脉搏波舒张压的最小值之间的距离;② 脉搏波的一阶导数最大值;③ 脉搏波的二阶导数最大值;④ 通过脉搏波最小值点的平行线与其上升曲线的拟合曲线之间的交点[4]。
方法①、②和④的计算复杂度和计算量都比较大,不适合嵌入式平台实现,所以本文采用求取一阶导数的方法。
对平滑后的桡动脉压信号进行求导:

式中m为求导间隔。
由于桡动脉压信号的特征点集中在波形的驻点处,而驻点处的导数值为零,所以将信号导数过零点作为特征点的判断依据。图4中所示的上方曲线为滤波后的桡动脉压曲线,下方曲线为其导数值,可见压力曲线的特征点与导数过零点一一对应。
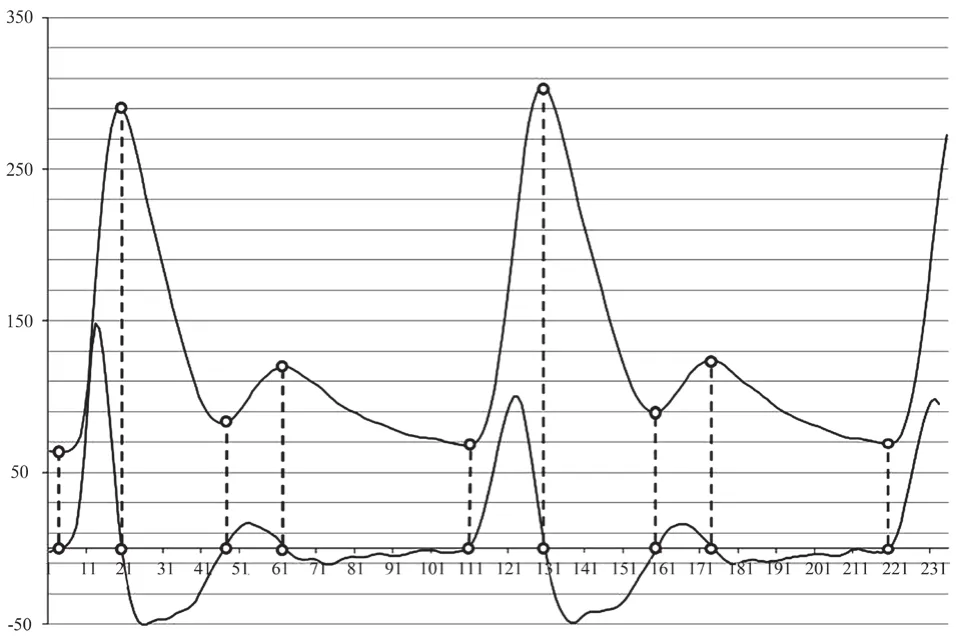
图4 .桡动脉压信号与其导数的对应关系Fig.4 radial arterial pressure and its derivatives
1.2.2 识别算法实现
心脏虽然是持续不断地工作的,不过其运动可以分解成单个的心动周期。因此,识别过程也应视为一个周期过程,每个周期需要一个起始触发点。主波峰b、动脉瓣开放点c、重搏波高度d和舒张期结束点e都可作为开始点,考虑到c、d、e三点虽然都是导数过0点,但在一些病例中c、d、e点的幅度相近不易区分,故以b点作为起始触发点。整个周期内识别如图5所示。
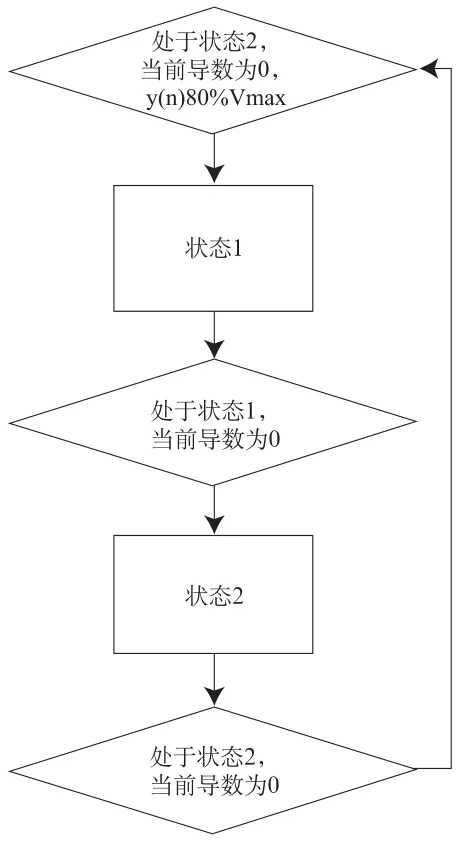
图5.系统状态转换图Fig.5 System status cycle
图5中Ymax为上个周期动脉压最大值,菱形框内为状态转换的条件。每个周期从寻找起始点b开始,找到主播高度b后进入状态1;当导数再次为0时,即找到动脉瓣开放点c,并进入状态2;当导数再次为0时,即找到舒张期结束点c,识别周期结束,进入下一个周期。通过起始点以及状态轮转的方式能够有效保证状态的顺序性,即使遗漏一个特征点也不会造成电机的非正常工作,从而提高了VAD的工作安全性。
1.3 基线漂移自适应
人体是一个非常复杂的系统,各种生理状态及情绪的变化等都会对桡动脉压产生影响,呼吸及身体的位移会导致采样信号的基线漂移现象。从图6.(c)中可以观察到,动脉压信号整体以一个较小周期上下波动。据实际采样数据分析,上下波动的范围可以超过脉压差的20%。
桡动脉压特征点的识别是与脉压幅度相关的,基线漂移影响算法的准确性。理想情况下桡动脉压震荡幅度固定,识别周期起始点b的判断条件为幅度大于上个周期主波峰幅值的80%且一阶导数等于0。但实际在基线漂移存在的情况下,经模拟算法经常会遗漏某些周期。考虑基线票以后,将识别周期起始点的幅度阈值设定为上一周期的脉压其平均值,即当新周期开始后幅值大于此阈值且导数为0时,判断为新周期的起始点。
1.4 延迟补偿
同步式辅助装置的工作需要严格同步于心动周期。图3中所示滤波器输出信号相对于原始采样信号有一个明显的延时,可见滤波器会引入延时。经统计,延时最大可达整个周期的10%,这种情况严重影响VAD同步辅助的实时性。
由图4可知,各特征点附近的一阶导数具有严格的单调性特点,故可采用阈值法修正IIR滤波器造成的延时,并补充硬件驱动电机自身的机械延时。将实时采样的动脉压求一阶导数值后取绝对值与阈值比较,若小于阈值则判定为有效特征点。阈值来自于实际桡动脉压数处理后统计的经验值。
1.5 心率失常识别
临床情况下,术后患者心脏时常会出现心律失常的情况,此情况下心室辅助装置就不适合工作在同步模式下了。为了有效解决此类问题,算法在每个识别周期完成后记录周期长度,比较最近N次心跳周期的变化率,在变化率大于预设的阈值时,则判定为心率失常。
2 实验验证
为了验证方法的有效性,使用嵌入式ARM9开发板导入实时采样数据进行仿真。桡动脉压数据采自上海交通大学附属瑞金医院心外科监护病房的三名患者。

图6 .几种典型病症的验证Fig 6.Verification of Several typical symptoms
由于实际辅助中只用到三个特征点,故以实际情况为例。图6中曲线为滤波后的桡动脉压曲线,折线为算法识别起始点b、动脉瓣开放点c和舒张期结束点e。如图6所见,一个周期中最高峰处的转折对应b点,其后的两个转折分别对应c和e。动脉压曲线由于病症、个体差异的关系呈现各异的形状趋势,但本算法都能实现实时跟踪识别。应用延迟补偿后,折线转折点出现的略早于特征点可有效抵消滤波器引入的延时现象。图6(c)有明显基线漂移现象,每个周期的波峰呈周期变化,算法亦能准确跟踪识别。
3 结论
本文提出了一种用于左心室辅助装置的有创桡动脉压信号前处理和心动周期识别方法。算法主要考虑实时性要求,根据实验验证能够准确识别心动周期的关键特征点,并且具有延时补偿、基线漂移自适应、心率失常识别的特点。将本方法与左心室辅助装置的机械驱动器[5]结合能够达到临床实时辅助的应用效果。
[1]李铁岩, 范慧敏, 刘中民.心室辅助装置的发展与临床应用[J].中国胸心血管外科临床杂志, 2010, 17(3): 230-234.
[2]George V.Letsou, Thomas D.Pate, Jeffrey R.Gohean.Improved left ventricular unloading and circulatory support with synchronized pulsatile left ventricular assistance compared with continuous-?ow left ventricular assistance in an acute porcine left ventricular failure model[J].The Journal of Thoracic and Cardiovascular Surgery,2010, 140(5):1181-1188.
[3]刘辉, 赵刚, 陈世超.基于LabVIEW的脉搏信号处理与分析系统设计[J].科学技术与工程, 2011, 11(14): 3151-3155.
[4]俞思聪.基于脉搏波的血压测量仪研制和临床验证[D].复旦大学, 硕士论文, 2011
[5]曹云, 潘钢, 臧旺福, 等.搏动式血泵驱动源的运动参数计算及精确实时补偿控制[J].中国医疗器械杂志, 2011, 35(2):97-99.
