某水声测距定位系统信号控制处理方法探析*
2012-06-07陈东宾
陈东宾
(海军驻温州地区军事代表室 舟山 316000)
1 引言
能把两种不同形式的能量进行互相转换的器件称为换能器。水声信号的发射与接收是由水声换能器实现的,在水声设备中多数采用电—声转换,因为这种转换方式最便于人工控制。水声换能器是指能将电能和声能进行相互转换的装置,它利用晶体(石英或酒石酸钾钠)、压电陶瓷(钛酸钡和锆钛酸铅)等的压电效应和铁镍合金的磁致伸缩效应来进行工作。所谓压电效应,是把晶体按一定方向切成薄片,并在晶体薄片上施加压力,在它的两端面上会分别产生正电荷和负电荷。反之在晶体薄片上施加拉伸力时,它的两个端面上就会产生与加压力时相反的电荷。电致伸缩效应,即在晶体的两个端面上施加交变电压,晶体就会产生相应的机械变形,引起周围水介质产生周期性震动,并最终形成声波。通过这两种方式,水声换能器得以实现水声信号的发射与接受功能[1~2]。
2 发射信号的调制放大
为实现同步测距,系统在原理上采用两个GPS时钟分别接到信号发射端与接收端,并同时发出时钟信号,通过测量两路信号到达接收端的时间差,最终得到两端之间的距离。
2.1 发射信号的调制
由于时钟本身发出的秒脉冲信号频率较低,不能在水中传输,因此系统利用单片机芯片内部时钟电路产生的高频信号作为载体。该内部时钟电路实际是由高增益反向放大器、石英晶体振荡器和微调电容构成的稳定自激振荡器,它可以不断产生固定频率的高频脉冲信号[3],再经单片机芯片逻辑变换后交替输出两路低电平。用时钟信号控制低电平的输出,就可以将连续不断的高频脉冲信号转换成为一系列与时钟秒脉冲信号宽度相同的高频脉冲波段,从而实现高低频信号的调制。
2.2 发射信号的放大
由于传输距离是通过测量传输时间差计算得到的,测量误差可以表示为[4]

其中,B为系统工作带宽,单频正弦脉冲又可表示为B=1/T,T为信号周期(s);S/N为接收信号信噪比。
由此可以看出,为了提高定位的精确性,减小测时误差,需要提高信号的带宽或者是信噪比。对于前者,减小信号的周期可以提高带宽,但信号的周期要考虑多种因素包括被测目标的运动速度、信号传输距离以及减小模糊距离的要求等综合决定。提高信噪比的方法有两种,提高传输信号能量或者减小接收噪声,当前较多采用的方法是通过功率来提高信号能量。系统发射机采用推挽功率放大电路如图1所示,其中场效应管在电路设计中被设计城断开、接通的开关使用。当有信号输入时,场效应管接通,通过变压器输出大幅度正弦波,反之不能输出,从而达到放大信号能量的目的。

图1 功率放大电路
3 水声信号的接收与检测
当水声信号到达接收换能器后,被转化为电信号进入接收机电路。接收机电路要对接收到的信号的处理,因此整个电路又分为放大模块、滤波模块、积分鉴压模块,如图2所示。
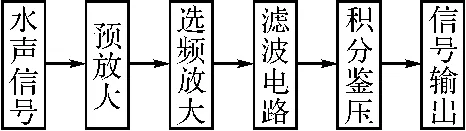
图2 信号处理流程图
3.1 信号的放大

图3 集成运放电路方框图
对信号进行放大的主要元器件是集成运算放大器,它是一种将各种电子元件以及它们之间的连线所组成的完整电路采用专门的制造工艺集成在半导体单晶芯片上,以完成某种特定功能的器件。集成运放电路由四部分构成,包括输入级、中间级、输出级和偏置电路。
由于系统中部分接收换能器要放置于水下某一深度位置上,采用带屏蔽层的长电缆传输信号,微弱信号在传输过程中会受到干扰,需要采用差动放大电路以减小共模干扰,提高输入阻抗,消除零点漂移。

图4 预放大模块电路示意图

3.2 选频放大
预放大处理针对于所有频率的信号,这些信号包括有效信号以及作业环境本身所含有的背景噪音信号,为了便于后续使用,还需要有选择性的对有效信号的强度进行加强,这一过程由选频放大器实现。经过预放大处理后的信号进入选频放大器,选频放大器再从多种频率的输入信号中,选取系统所采用频率的信号进一步放大。

图5 选频放大器原理图
如图5所示,放大器由集成运放和LC并联反馈回路组成,LC并联回路的表达式可以表示为
由表达式可以看出阻抗Z是频率的函数,当通过反馈电路的信号频率为系统设定频率时产生谐振,此时wL=1/wC,并联回路对该频率阻抗呈现最大,且成纯电阻性,此时放大器的电压放大倍数最大。当其他频率信号通过时,回路阻抗下降,放大器的电压放大倍数降低,信号得不到放大。
3.3 滤波电路
滤波通常分为无源滤波和有源滤波,前者是指滤波电路中只含有无源元件(电阻、电容、电感),该类滤波电路的通带放大倍数及其截止频率会随负载而变化,致使其常常不符合信号处理的要求。而有源滤波则除含有无源元件外还包括有源元件(单极型管、双极型管、集成运放)较好的解决了负载对滤波特性的影响。按照滤波电路的工作频带,滤波又可以分为低通滤波、高通滤波、带通滤波、带阻滤波器和全通滤波。设定截止频率f,频率低于f的信号可以通过,高于f的信号被衰减的滤波电路成为低通滤波,反之成为高通滤波;设低频段截止频率为f1,高频段截止频率为f2,频率在两者之间的信号可以通过,反之被衰减的滤波电路称为带通滤波,反之称为带阻滤波[7]。
针对本系统,由于低频信号在水中不能传播,为了能实现信号的传输,与高频信号进行了调制,因此经过选频放大器筛选放大出来的有效信号是由一系列并不规整的高频振荡脉冲组成的,为了得到所需要的低频信号,必须进行滤波处理,即通过检波电路将高低频信号进行分离。此外,由于高频振荡信号的存在增加了电压比较器的非必要工作量,也需要将高频信号加以过滤,消除高频信号的不利影响。
如图6所示,利用二极管的正向导通特性保留输入信号的正半部分,T1的作用主要是利用集成运放引入反馈电路来增强二极管的正向导通性。经过二极管处理后的信号进入由T2构成的低通滤波电路,滤掉调制信号内部的高频信号并保留信号外包络线,使之成为规整的低频脉冲信号进入电压比较器。
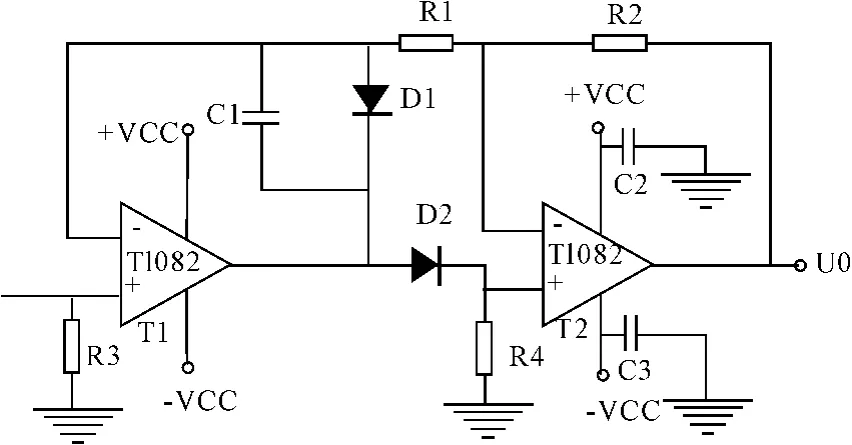
图6 滤波电路图
滤波电路对输入信号的处理效果示意图如图7所示:
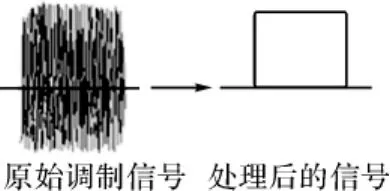
图7 滤波电路效果示意图
3.3 积分鉴压
对于系统而言,积分鉴压模块主要作用是对输出的低频信号进行相位补偿,消除因信号相位偏移带来的时间计量上的误差。同时起到输出电平作用,当进入模块的脉冲信号电压幅度达到预设值时为有效信号,此时电压比较器输出高电平,并最终进入下一工作阶段。
4 结语
通过试验表明,调制处理后的时钟信号与声信号进行转换后能够在水介质中传输不失真,同时,经过接收电路放大处理后能够较好的提高所需频率信号的强度并有效降低噪音信号的影响,满足检测需求。此外,滤波及积分鉴压模块使信号得到进一步规整,为信号后续使用提供了便利。
[1]马大猷.现代声学理论基础[M].北京:科学出版社,2004:127-142.
[2]王淑娟,康磊,翟国富.电磁超声换能器的微弱信号检测[J].试验研究,2007,29(10):591-595.
[3]曹建树,夏云生,曾林村.51系列单片机实用教程[M].北京:中国石化出版社,2008:17-19.
[4]庞雷,李斌.舰载式高精度水下定位系统[J].电声技术,2007,31(3):63-65.
[5]卢珺,程远胜.单片机系统中CAN总线位移传感器的设计[J].计算机与数字工程,2011,39(9).
[6]谭联群,胡生亮,付学志.基于单片机和FPGA的程控型逻辑分析仪设计与实现[J].计算机与数字工程,2011,39(7).
[7]叶挺秀,张伯尧.电工电子学[M].北京:高等教育出版社,1999:
127-151.