基于传声器阵列的产品噪声源定位技术的应用
2012-06-03李嘉张国庆
李嘉,张国庆
(深圳市计量质量检测研究院,广东 深圳 518055)
0 引言
传声器阵列定位技术是一种非常有效的噪声源识别、定位以及声场可视化的工具。它可在非接触条件下对噪声源进行精确的定位,在机电产品工作噪声改善,汽车、飞机、高铁的噪声、振动与舒适性(NVH)检测,大型旋转机械的非接触式在线故障诊断等领域有着广泛的应用[1]。
传声器阵列是指由一定的几何结构排列而成的、若干个传声器组成的阵列,它具有很强的空间选择性,而且不需移动传声器就可获取移动的声源信号,同时它还可以在一定的范围内实现声源的自适应检测、定位及跟踪,这使得它在诸多领域有着广泛的应用[2]。传声器阵列声源定位是指用传声器阵列来拾取声音信号,通过对多路声音信号进行分析与处理,在空间域中定出一个或多个声源的平面或空间坐标,即得到声源的位置。现阶段,比较成熟并在测量领域应用较多的两种声源定位技术是:基于空间声场变换法(STSF)的传声器阵列声源定位技术和基于波束形成法(Beamforming)的传声器阵列声源定位技术。
1 基于STSF的传声器阵列声源定位技术
1.1 稳态STSF定位方法
在近场测量时,广泛使用的方法为空间声场变换法(STSF: Spatial Transformation of Sound Field)。
由理想流体媒质中的小振幅声波的波动方程[3-4],可以得到无时间变量的稳态声场的Helmholtz方程:

式(1)中:p(x,y,z)——空间声压,是直角坐标系 x,y,z的函数;
k=w/c=2π/f——声波数;
c——声速;
λ——特征波长。
对于z>0的空间为自由声场的情况,即所有的声源均位于z=0平面以下,用格林公式求解式(1),得z>0空间任一点的声压为:
式(2)中,S积分在无穷大的边界面进行,gD,N为无穷大平面的格林函数。
已知空间内沿x,y方向上的二维连续傅里叶变换:

对式(2)两边进行二维傅里叶变换,根据二元卷积定理可知:

式(6) 中: P(kx,ky,z), PD,N(kx,ky)是声压 p(x,y,z)和边界条件 PD,N(x,y)的二维连续傅里叶变换;
GD,N(kx,ky,z)为 gD,N的二维傅里叶变换, 解析表达式为:


将式(7)、(8)带入式(6),可以建立任意两平面z=zH(全息面)和z=zS(重建面)的一般关系[5]:

式中:ρ——声介质的平均密度。
由式(9)、(10)可知:已知 z=zS平面的声压或质点法向振速,可以预测出z=zH的声压情况,通过Euler公式可以很方便地推测出z=zH面的质点法向振速,由此,可以进一步地导出声场参量:声强及远场指向性等;同理,已知z=zH的声压数据也可以反演表面z=zS的声压和质点法向振速。由此,可以得到平面近场声全息的基本重建公式:

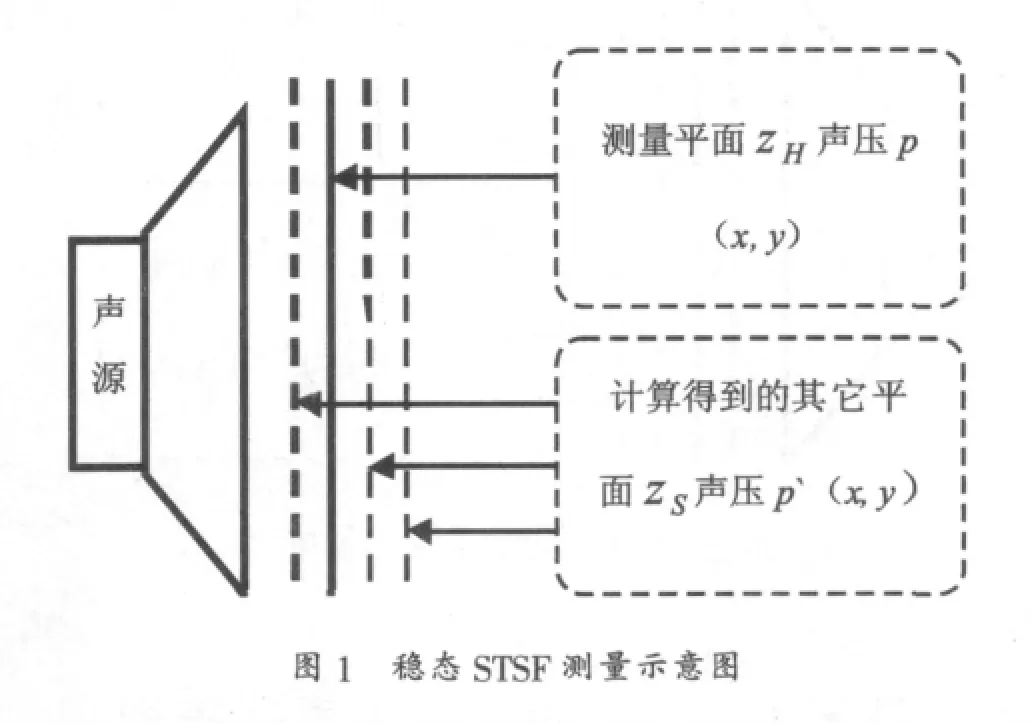
在实际的测量过程中,STSF测量系统通过将传声器阵列测得的一个平面的二维空间数据,通过近场声全息(NAH:Near-field Acoustical Holography)和Helmholtz积分方程,计算出其它平面位置的声压,得到三维空间的声场图形,从而实现空间声源定位,如图1所示。
使用STSF技术的阵列声学定位系统,要求传声器阵列必须覆盖所测量的声源表面,并且传声器阵列需要在被测声源的近场测量。传声器在阵列中的间距决定了测量的上限频率,如式(13)所示。

式(13)中:△l——传声器间距。
根据此规律,传声器间距和测量频率的上限关联典型值如表1所示。

表1 STSF测量阵列声器间距和测量频率的上限关联典型值
因此,使用STSF测量阵列进行声源测量时,由于传声器阵列中测点间距的关系,测量频率上限是有限的,通常在1.5kHz以下。
1.2 非稳态STSF定位方法
图1所示的STSF测量系统,主要适用于稳态声源的测量。当被测声源为非稳态声源时,需要在傅里叶变换和全息过程中加入时间参量t,其变换过程如图2所示。

2 基于Beamforming的传声器阵列声源定位技术
STSF测量方法解决了近场声定位的测量,但是当测量远距离声源,或者声源表面积很大,不可能使用传声器阵列在近场完全覆盖时,就需要另一种可以使用较少测量点的传声器阵列,在较远的距离对声源进行定位测量的方法。最常见的就是基于Beamforming技术的声源定位方法。
在使用STSF进行声源定位时,由于是近场测量,可以认为声源辐射方向与传声器阵列面垂直阵列中的每个传声器所接收到的信号之间在时间上是同步的;而在远场测量时,声源更接近于点声源,如图3所示。

由于声源和各个传声器之间的距离不相等,每个传声器接收到的声波有不同的时延△m,式(14)表示了第i个传声器接收到的信号[6]。

式(14)中:Ni(t)——表示均值趋于零的干扰。
由于传声器阵列的结构和声速是已知的,于是,对于空间每个位置的声源,都可以解出一组对应的时延。如果对每个传声器接收到的信号分别用△m修正,就要将来自声源的声波对齐,然后将所有M个修正后的信号求和;由于干扰信号Ni(t)的均值趋于零,因此,可以得到增强了的声波信号, 见式(15)。

将图3中的时延△m的向量形式带入式(15),可得到接收信号的时域向量表达式,见式(16)。

对式(16)进行傅里叶变换,即可求出接收信号的频域向量表达式,见式(17)。

在使用时,Beamforming阵列声学测试系统的测试距离最小值要求大于传声器矩阵的直径,最大值可到无穷远。其有效的聚焦范围通常为测试距离的1.15倍,如图4所示。系统的空间分辨率R≌(L/D)λ,测量上限频率由fmax最大旁瓣量决定,下限频率fmax>3c/D。因此,Beamforming阵列声学测试系统的测量下限频率无法做到很低。
3 两种噪声源定位技术的应用条件
由于两种声源定位技术的原理有所不同,所以其适用的频率范围和空间范围也各不相同。表2列出了两种声源定位技术在指标上的差异。
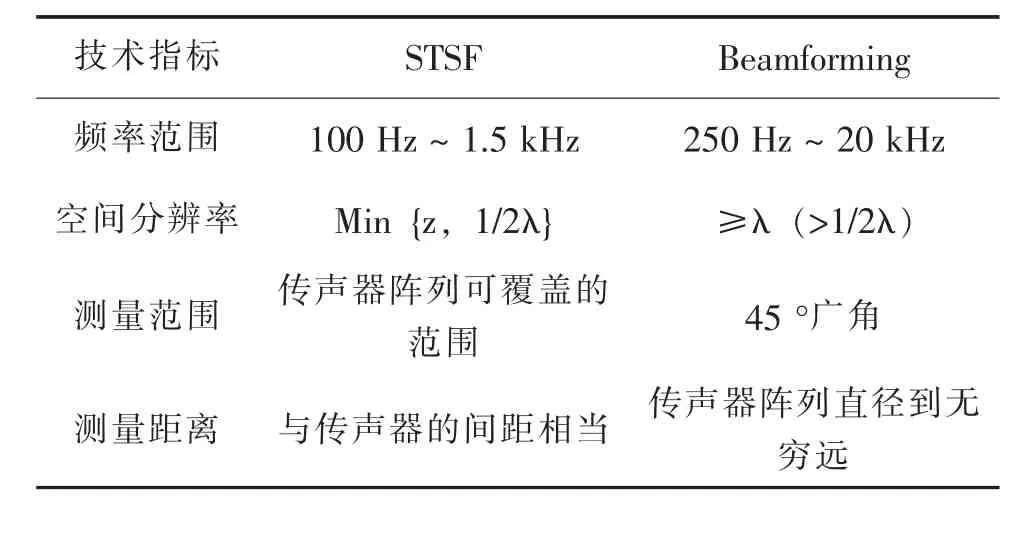
表2 STSF和Beamforming的对比
可以看出,STSF和Beamforming这两种声源定位技术,一个适用于近场中低频,另一个适用于远场中高频,两者互为补充。
4 结束语
在电子及工业产品的噪声测量及改善的过程中,噪声源的准确定位极为重要。为了保证声源定位的准确性,应对不同的声源特性合理地选择传声器阵列声源定位的方法,并结合信号频谱分析、模态分析等技术,分析噪声产生的原因,加以改善。同时,如何将两种声源定位技术的优点结合起来,实现一个传声器阵列可同时覆盖近声场和远声场,并可在全频段进行声源的定位测量,是声源定位技术下一步研究的重点。
[1]李加庆,陈进,史重九.基于声全息的故障诊断方法[J].机械工程学报,2009,45(5):34-38.
[2]林志彬,徐柏龄.基于传声器阵列的声源定位 [J].电声技术, 2004, 5: 19-23.
[3]WILLIAMS E G, MAYNARD J D.Holographic imaging without the wavelength resolution limit[J].Physics Review Letters, 1980, 45: 554-557.
[4]WANG Z, WU S F.Helmholtz equation-least-squares method for the reconstructing the acoustic pressure field[J].Journal of the Acoustical Society of America, 1997, 102:2020-2032.
[5]宫延明,金涛,谢志东.应用近场声全息方法对噪声源的实验研究 [J].现代机械,2008,(3):34-37.
[6]钱世锷.声学照相机 [J].国外电子测量技术,2009,28(2): 5-8.
