高速数传信号角跟踪及误差分析
2012-06-01张晏旭吴铁柱
张晏旭,吴铁柱
(1.中国电子科技集团公司第27研究所测控工程部,河南郑州 450047;2.西安卫星测控中心测控技术部,陕西西安 710043)
近几年来,随着遥感技术的发展,图像分辨率不断提高,低轨遥感卫星数据率也在不断刷新纪录,从几百Mbit·s-1上升到几 Gbit·s-1,工作频段也从 X 频段扩展到Ka频段甚至更高,如何提高高速数传信号角跟踪灵敏度和跟踪精度,减小角跟踪误差,是建立稳定可靠星地数据传输链路的关键技术。
高速数据信号角跟踪技术,是通过幅度检波、正交解调提取角误差信息,适应各种信号类型,尤其适应不同调制方式的遥感卫星信号的宽带角跟踪技术[1],与传统的单脉冲窄带跟踪方式不同,影响跟踪性能的因素和分析方法也有所不同。结合已经研制成功的高数数传角跟踪系统,介绍了数传信号跟踪原理和工程实现方案,并对跟踪误差进行了分析。
1 单通道宽带跟踪技术
1.1 单通道宽带跟踪系统
对于单脉冲跟踪体制,比较器输出的两路误差信号ΔEL和ΔAZ首先进行单通道技术处理,将ΔEL和ΔAZ信号进行π/2移相后与另一路差信号合并为一路误差信号,再对合并的差信号进行QPSK调制后对耦合的和信号进行调幅,形成时分复用调幅波,在输出端再分别进行恢复。这种单通道单脉冲跟踪技术的优点是设备简单、结构紧凑、便于实现两路误差信号间的幅相特性一致,有利于信号的自动增益控制和其他技术处理[2]。单通道单脉冲信号跟踪系统原理如图1所示。
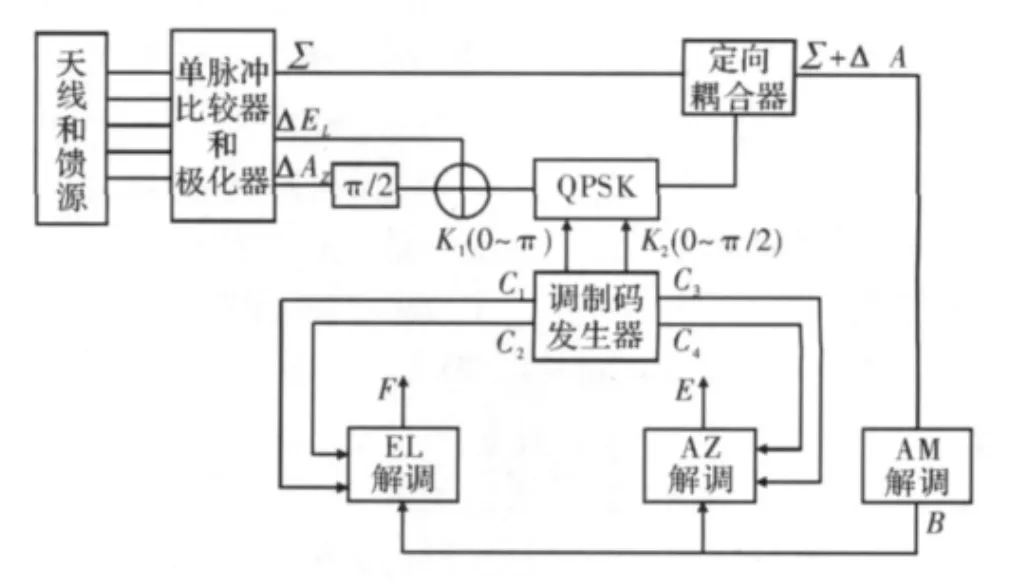
图1 单通道单脉冲宽谱跟踪系统原理框图
1.2 宽带跟踪理论推导
采用图2所示的角误差坐标系表示。A0为天线电轴指向,垂直于目标平面xoy,θ为误差角,ε为天线电轴指向误差,Φ为指向误差OP与水平轴的夹角,即角误差方向角。

图2 角误差形成坐标系
根据角误差坐标系则有:方位误差电压 εAZ=μθcosφ;俯仰误差分量 εEL=μθsinφ 设目标来波为理想圆极化,接收到和信号为

其中,A∑为信号幅度;ω为接收的射频信号频率;n∑(t)为和信号噪声。接收到的差信号为

其中,AΔ为信号幅度;nΔ(t)为差信号噪声。微波和信号通道与差信号通道的相位差,通过移相处理,可调整为0。
差信号经过调相器四相移相后为差信号为

n=0,1,2;T为调制方波信号的周期;M为差信号耦合系数。
Σ、Δ信号相加合成后
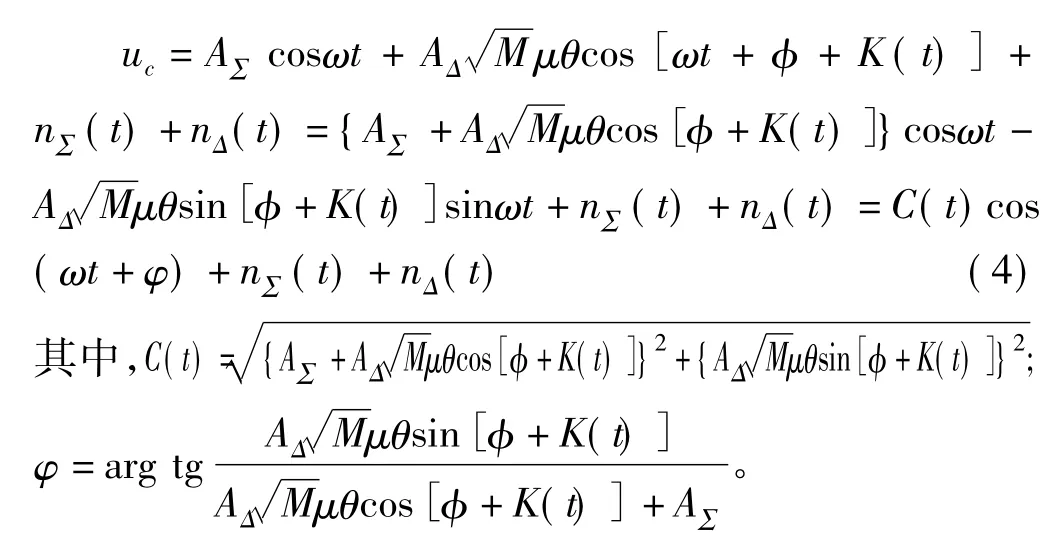
经过放大、下变频和滤波放大后,信号中心频率变为ω0;噪声变为窄带高斯噪声,信号变为

式中,nc(t)和ns(t)为带限高斯噪声的同相和正交分量;σ为噪声信号随机相位。
包络检波后
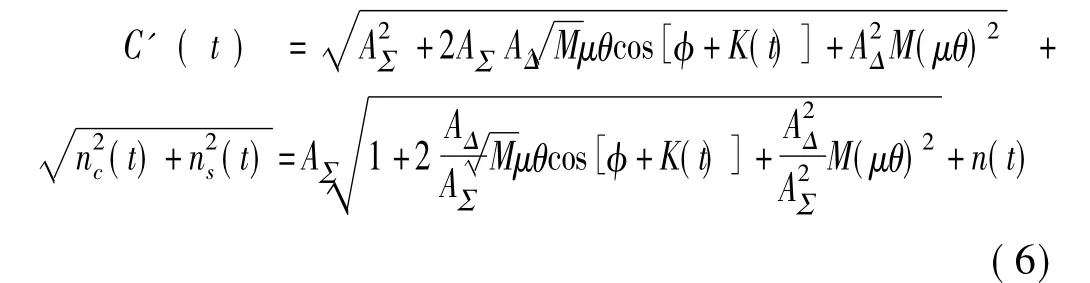
在A∑≫AΔ,且M,θ均很小的情况下,有

那么,根据(1+x)n=1+nx,x≪1,有
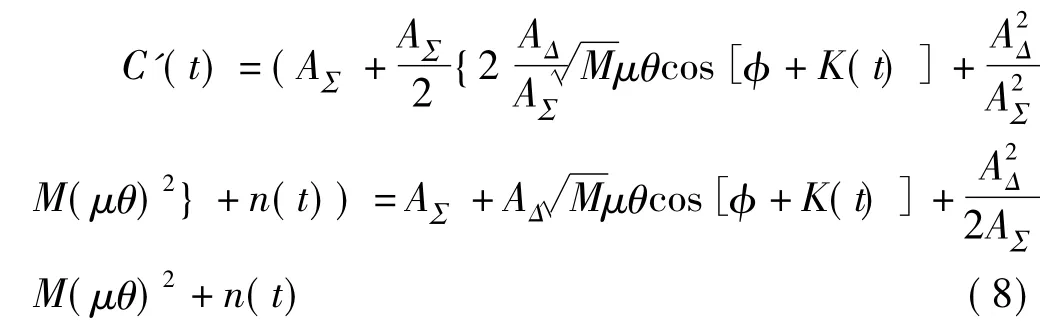
隔直滤波后,取出包络信号

对此信号再与K(t)进行分时累加处理解调,即可得到方位和俯仰角误差信息
则方位电压

俯仰电压

上述结果中的幅度表征了天线偏离目标角度的大小,两项相减的符号表明了天线偏离目标的方向,方位和俯仰误差电压送伺服系统,根据角误差电压的大小和方向,驱动天线完成对目标的自动跟踪。
2 系统方案
跟踪系统组成框图如图3所示。系统主要由和路低噪声场放、差路低噪声场放、8 bit数字移相器、下变频器、数字中频跟踪接收机、伺服控制和伺服驱动单元等组成。
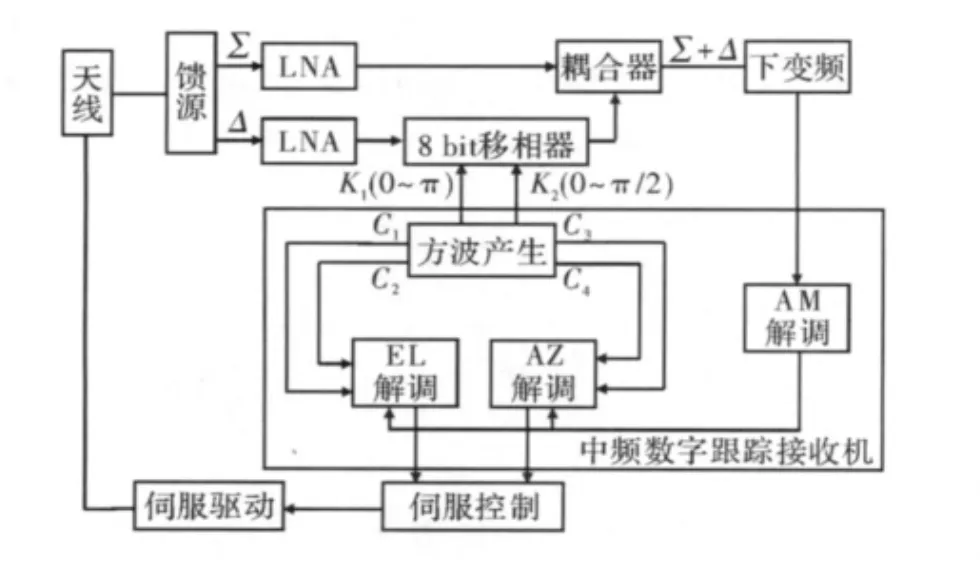
图3 跟踪系统组成框图
(1)差信号调制。K1和K2为移相调制方波,K1的频率是K2频率的2倍,方波K2每个高电平对移相器移相90°,方波K1每个高电平对移相器移相180°。该调制方波作用于数字移相器高两位对射频差信号进行调制,形成 0°、90°、180°、270°相位调制差信号后,与和信号合成单通道调幅跟踪信号。差信号调制信号时序如图4所示。

图4 差信号相位调制时序图
(2)数字中频跟踪接收机。采用全数字化方案实现,ADC采样中频频率为70 MHz。其中ADC完成模拟信号到数字信号的转换,数字下变频模块(DDC)通过数字中频信号与NCO产生的正弦和余弦信号相乘混频得到基带频率的I、Q两路正交信号,并分别对两路信号完成抽取和滤波,数字调幅解调模块则完成了AM信号的解调和数字AGC电压的积分、环路控制;数字误差解调模块最终实现方位、俯仰信号的分离,方位与俯仰误差电压解调恢复。调幅解调原理如图5所示,角误差解调如图6所示。
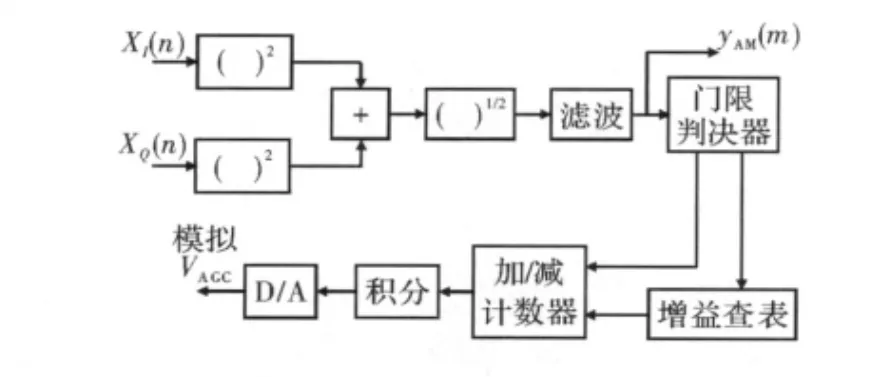
图5 调幅波解调原理
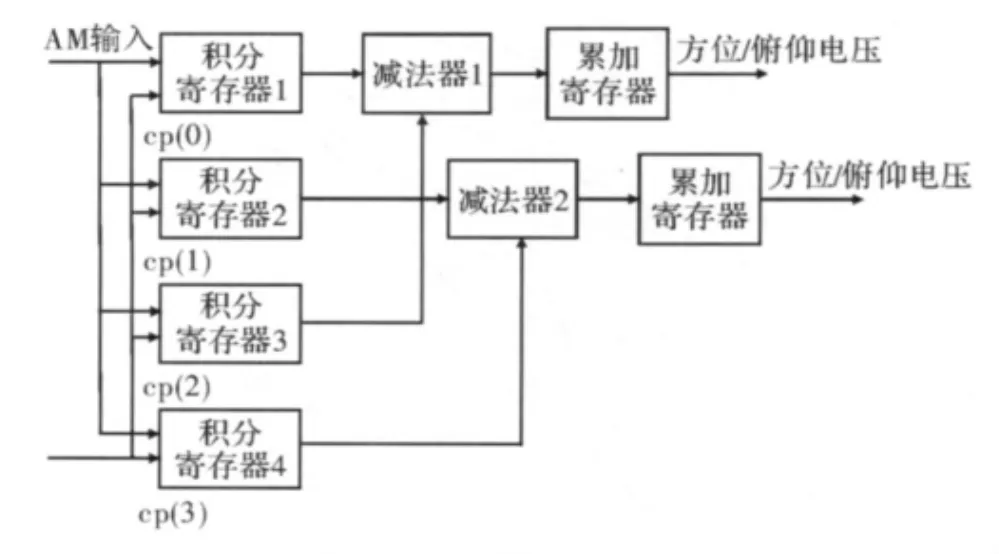
图6 角误差解调原理
3 跟踪误差分析
影响跟踪性能,造成跟踪误差增大的主要因素包括:和差信号相位不一致误差、调制解调不同步误差和热噪声误差等。
3.1 和差相位不一致误差
如果在差信号合成前,和差信号存在相位差,不仅在方位、俯仰误差电压中存在交叉耦合分量,还会造成误差灵敏度的降低。解决问题的方法是在高频和支路或差支路加一可调移相器调整两信号的相对相位差,调整的依据是系统的误差灵敏度最大且交叉耦合最小。在工程应用中,系统允许跟踪误差灵敏度下降1%[3],如果交叉耦合系数要求>1/7,根据公式可以计算出和差信号剩余相位差不应>8°,实际测量结果表明,和差通道信号相位差可以调整到3°以内。
3.2 调制解调不同步误差
调制和解调脉冲不同步同样会造成跟踪灵敏度下降,同样允许跟踪误差灵敏度下降1%,可计算机出允许不同步误差为8°。
3.3 热噪声误差
由于采用和、差支路单独配置低噪声放大器的方案,低噪声放大器的增益很高,放大器后馈线和功能部件的噪声贡献可忽略。
则进入伺服单元支路的热噪声功率为N=KT2β,其中,2β为伺服双边带噪声带宽,K为系统等效噪声温度。则热噪声功率引起天线电轴的偏角为

综合考虑差路调制信号对和路数据信号的影响,在保证系统品质因素的前提下,系统耦合系数M取值约为6 dB,X波段12 m天线系统等效噪声温度约为22 dBK,差通道增益约为120 dB,伺服带宽1 Hz,归一化差斜率取1,计算出由于热噪声造成跟踪误差<0.002°。
4 结束语
采用本方案设计的宽带跟踪系统已成功应用于多个工程项目,跟踪性能平稳,跟踪精度满足系统指标要求。将记录的方位和俯仰跟踪角数据先与基准角度比较,然后利用变量差分平滑处理,得到方位和俯仰的跟踪标准误差。结果表明:卫星的高速数据信号采用宽带跟踪方式的跟踪精度与同等信噪比下信标角跟踪方式的跟踪精度相当。
[1]杨长全.雷达接收机设备[M].北京:电子工业出版社,1997.
[2]张晏旭.遥感卫星地面接收系统总体技术方案建议书[M].郑州:中国电子科技集团公司第二十七研究所,2008.
[3]李志杰.多模单通道跟踪系统[J].现代电子技术,2004,32(18):59-61.
[4]王仁涛,王毅,李斌.高功率微波武器的防空作战应用[J].电子科技,2011,24(11):128 -131.
[5]胡娟,陈文全.同步轨道共位卫星位置确定技术[J].电子科技,2012,25(7):136 -138,141.
