无人机影像验片辅助系统设计与实现
2012-05-31张凤梅叶菲
张凤梅,叶菲
(1.江苏今迈数字空间技术股份有限公司,江苏南京 210019;2.南京今迈勘测监理有限公司,江苏南京 210005)
1 引言
UAV(Unmanned Air Vehicle,无人驾驶航空飞行器)遥感平台的出现为快速获取高分辨率遥感图像提供了一种新的技术途径。无人机的机动性、灵活性使得它不要求专用起降场地,特别适合在建筑物密集的城市地区和地形复杂地区、国内南部丘陵、多云地区、地质灾害、应急工程等区域应用。无人机携带的数码成像设备具备低空多角度摄影获取建筑物多面高分辨率纹理影像的技术能力,弥补了卫星遥感和普通航空摄影获取城市建筑物时遇到的高层建筑遮挡问题。无人机遥感平台的劣势也很明显,如像幅小、基高比小,相同的重叠度情况下,需要更多的控制点;姿态不稳定,旋偏角、俯仰、滚动,甚至导致连接有问题;非专业量测相机,光敏度、像点位移、存在镜头畸变及其他未知的系统误差。所以如何客观地评价无人机飞行质量及其参数就是一个值得探讨的问题。笔者结合参与南京高新开发区无人机影像验片项目生产及配套软件开发的经验,对无人机影像验片辅助系统的实现作简要探讨,供大家参考指证。
2 传统人工底片法验片
用底片法验片主要是通过特制的检查尺、量角器及透图台等检查工具,参考航摄飞行技术设计书、标有设计航线、测区界线的地形图及飞行记录表等资料,通过人工配准两相邻底片的同名点,进行相关参数的量取计算,求出航向重叠度,旁向重叠度,像片旋偏角,航线弯曲度等数据,从而判断航摄飞行质量情况,得出是否有质量元素超出规范,是否存在航向或航线间的相对漏洞和绝对漏洞。
传统人工底片法验片最大的优势在于工具和方法简单,不需借助专业软件甚至是计算机,便可以达到质检项目中所要求的质量标准和量化指标,但其缺点也很明显,首先人工配准受相片分辨率限制,配准精度很低;其次,人工工作量很大,需长时间重复配准、读取检查尺读数、手工记录参数并计算、像片主点位置、相片号精确标注到地形图等步骤,作业员易疲劳,易出错;最后,每个作业员水平不一,但配准结果无法保留,不易检查作业质量,也就很难控制作业质量。无人机相片像幅小,同样测区面积要比DMC相片数量多4倍以上,全部采用传统人工底片法验片不仅耗费大量人力,而且打印相片成本相对较高。
3 无人机影像验片辅助系统
基于AutoCAD平台的无人机影像验片辅助系统是利用AutoCAD软件的影像处理功能,结合VB.net开发平台进行二次开发,提供一种在计算机中进行人工交互相片配准的功能。进行相片相对定位,并用辅助系统功能直接计算验片的相关参数并自动记录,从而达到计算机辅助验片的效果。
3.1 AutoCAD影像处理平台
由于本次无人机相片提供的是JPG格式的电子文件,要实现计算机辅助验片,必须选择影像处理平台或从底层进行开发,通过对比多种影像处理平台(ERDAS IMAGINE、ENVI、ArcGIS)等二次开发的难易程度,本着简单、快速、高效的原则,最终确定以AutoCAD平台作为验片辅助系统的影像处理平台。
AutoCAD软件提供的影像处理功能与ERDAS IMAGINE、ENVI等专业影像软件相比最大优势就是操作简单,易于学习和进行二次开发。AutoCAD影像处理对象只包含Raster一个,在对象模型中的位置如图1所示。Raster支持JPG、TIFF等格式影像文件,提供Move、Rotate、ScaleEntity、IntersectWith 等有限的几个操作影像的方法,利用这几个简单的方法即可实现无人机影像验片辅助系统。
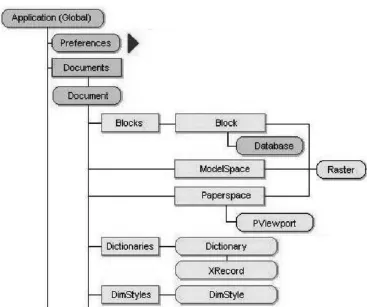
图1 对象模型图
3.2 系统功能框架图
本文根据航空摄影规范所规定的验片所需检查的质量元素和检查项的要求,结合作业实际和无人机相片的特点,进行了无人机影像验片辅助系统的研究和设计,总体功能框架如图2所示。

图2 系统总体功能框架
3.3 无人机影像验片辅助系统功能设计
根据功能的相关性和联系的紧密程度,将系统分为用户登陆模块、任务选择面板模块、相片相对定位模块、条带影像查看模块、信息查询统计模块、定位信息导出模块、生成报表信息模块7个子模块,每个模块完成一组各自不同的功能,具体设计如下:
(1)用户登陆模块:由于验片定位结果统一存放于一个Access数据库中,多个作业员同时进行验片操作,为保证系统和数据的安全以及统计各作业员的工作量需要而设置。设定好参与项目的作业员及相应权限,登陆后方可使用系统进行操作。
(2)任务选择面板模块:本模块是系统功能的集中展现,是进入系统后用户面对的第一个界面,系统提供的功能在面板上一目了然,并提供相关功能说明和使用步骤的提示。
(3)相片相对定位模块:本模块是为取代手工配准底片而设计,通过条带文件夹设置,自动在AutoCAD软件界面中连续载入相邻相片JPG文件,通过人工选择两对或三对同名地物点,将第二张相片匹配到合适位置,匹配满意时可保存第二张相片的定位结果,同时保存像主点及两相片交点坐标,即完成相片相对工作。
(4)条带影像查看模块:本模块可检查或查看配准结果。通过选择相片文件,系统自动在定位数据库中查找相应定位信息,根据查询数据自动载入相片JPG文件,并进行平移、旋转、注记带号和片号等操作,方便查看定位配准质量情况,也可查看单张或整个测区影像的footmark。
(5)信息查询统计模块:本模块通过对数据库中相邻相片的定位结果信息进行计算,可得到像对航向重叠度、旋偏角、旁向重叠度、航向弯曲度等验片信息,并可分条带对验片数据进行最大值、最小值、平均值的查询和统计;也可以对条带验片生产进度和每个作业员的工作量进行查询,方便及时调整人力配备,加快验片进度。
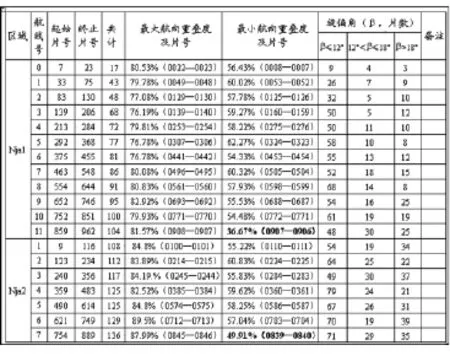
图3 验片结果报表
(6)定位信息导出模块:由于AutoCAD软件中影像查看功能很弱,影像载入较多时显示速度会越来越慢,所以不适合大量影像的同时查看。本模块提供定位信息,生成其他影像平台支持的定位文件,实时调阅、检核所需影像数据,方便影像查看。如生成TFW文件便可在ArcMap中查看定位影像。
(7)生成报表信息模块:可以方便、快捷的生成整个测区验片结果的报表,极大提高生产效率,如图3所示,即为系统自动生成的报表之一。
4 系统实现
无人机影像验片辅助系统是基于AutoCAD平台,结合Microsoft Visual Studio 2005集成开发环境进行开发,数据库采用了 Access数据库,开发语言为 VB.NET。整个系统开发基于开发难度最小、速度最快、方便作业员使用的原则进行。

图4 系统界面
虽然系统功能不甚强大,如没有加入高级的影像自动匹配模块,而仍然采用了人工辅助配准的方式,也没有基于功能更强大的流行的影像处理平台进行开发,如ERDAS IMAGINE、ENVI等,主要是考虑到生产周期和开发成本的最小化。实际开发过程也很好地达到了这一目的,最初的版本在任务接到后3天已经能投入生产使用,并在生产中不断完善和加入新的功能。系统初始界面如图4所示。
5 结语
无人机影像验片辅助系统,在南京高新开发区无人机影像验片项目中发挥了很好的使用效果。实践证明,该系统对作业员要求低,稍加培训即可投入验片生产,并且很容易监督作业质量和进度;能够快速高效地进行大批量相片验片工程,并保证验片质量和验片结果的可追溯性,满足规范对验片各项质量元素的检查要求。但由于各种条件的限制,本系统对于影像的自动匹配技术的应用还未涉及,使得生产效率还有待提高,还需结合影像匹配理论深入研究和应用,进一步提高系统的自动化程度,加快验片效率,减轻劳动强度,使得质量优良的影像成果更好地服务于城市建设和管理的各个方面。
[1]王佩军,江丽杰,张文燕等.直接使用航摄底片进行飞行质量检查[J].测绘信息与工程,2001(3):38~40.
[2]宫阿都,何孝莹,雷添杰等.无控制点数据的无人机影像快速处理[J].地球信息科学学报,2010,Vol.12:254 ~260.
[3]何敬,李永树,鲁恒等.无人机影像的质量评定及几何处理研究[J].测绘通报,2010(4).
[4]何敬,李永树,鲁恒.无人机影像拼接误差实验研究[J].激光与光电子学进展,2011,48(12).
[5]冯志明.浅谈无人机影像相对辐射校正方法[J].城市建设理论研究,2011(10).
[6]赵红颖,晏磊,勾志阳.无人机遥感影像正射校正方法与质量评价[C].中国感光学会第七次全国会员代表大会暨学术年会和第七届青年学术交流会论文摘要集,2006.
