基于STC89C52单片机的舵机控制系统设计
2012-05-18衡水职业技术学院王素芹程连生
衡水职业技术学院 王素芹 程连生
一、小型自控飞艇舵控系统简介
舵机是小型自控飞艇执行机构中最主要的执行部件,能否快速、准确地完成对舵机的控制直接关系到飞艇的自主控制效果。因此,舵控系统成为小型飞艇自主飞行控制系统中最重要的组成部分之一,它的主要功能是接收艇载计算机发出的控制指令,实现对控制指令的采集、分析和处理,并根据控制指令向舵机输出连续可调的舵控信号,操纵艇上各舵机完成预定动作。
二、舵控系统硬件设计
本飞艇舵控系统以多片STC89C52单片机为核心,配合电源模块、驱动芯片及多路转换开关等在一块印制电路板上实现预定功能。
舵控系统主控芯片选择STC89C52单片机,它具有8KB的并行可编程非易失性FLASH程序存储器,并可对器件串行在系统编程(ISP)和在应用中编程(IAP)。数据保留时间:10年,全静态工作:0Hz-24MHz,三级程序存储器锁定,128×8位内部RAM,32可编程I/O线,4组8位I/O口,两个16位定时器/计数器,5个中断源,可编程串行通道,低功耗的闲置和掉电模式,片内振荡器和时钟电路。
电源模块采用78xx系列端稳压集成电路,它是线性三端稳压器件。利用该器件只需极少的外围器件便可构成高效稳压电路,为MCU稳定可靠的工作提供强有力的保证。
此外,为增强信号的驱动能力,在输出之前采用74LS245作为信号驱动芯片;串口电平转换采用Max232芯片。
三、舵控系统软件设计
1.软件总体结构
舵控系统各单片机程序均在Keil C51环境下采用C语言编写。为了保证系统的实时性及快速性,软件编写采用了主程序+任务+中断的结构。
在三部分程序中,以主单片机1的外部中断最多,包括串口中断、与主单片机2的握手中断以及艇载计算机看门狗的外部中断,这几个中断的优先级排列顺序是:艇载计算机看门狗中断>串口中断>握手中断。主单片机1接收到艇载计算机通过RS232串口发来的信息帧后,首先进行帧识别,提取出前m个字节的数据,加上帧头帧尾后由P1口发送给主单片机2;并将第m+1个字节数据作为开关量通道控制信号由P2口输出,用作系统控制备用。
主单片机2程序的主要任务是通过其P1口接收上位机传来的数据,提取各控制信息,在相应控制指令的前面加上地址,依次由串口发送给下位舵控单片机。
舵控单片机的主要任务是识别控制指令和地址指令,并根据收到的控制指令(舵机占空比信号)产生PWM波控制艇上舵机。
该系统软件设计中的关键问题包括以下几个方面:
(1)控制信号流程中数据帧的接收识别;
(2)舵控系统中主从单片机之间的多机通信;
(3)PWM波舵控信号的软件产生方法。
2.软件设计中的关键问题
(1)数据帧的串口接收及识别技术
采用了中断服务程序就地帧识别技术,其优点在于数据接收后立即进行帧识别,省去了对缓冲区的管理工作,减少了存取次数,因而节省了大量的时间,极大地提高了接收程序的实时性。同时错帧和断帧被自动丢弃,不再占用资源。
(2)单片机多机通讯
在舵控系统设计中,各部分间的通讯是设计的重要内容,其中主要包括单片机与上位PC机间的通讯和单片机与单片机之间的通讯。在舵控系统中,主单片机1与上位PC机通讯是通过单片机自带的一路异步串行通讯接口完成的;而主单片机1通过其P1口向主单片机2传输数据,
此系统中,主单片机2作为主机,m个舵控单片机作为从机,在主机与从机的通讯过程中,串口控制寄存器中SCON中的SM2位发挥了重要作用。当其中一个舵控单片机的SM2位为1时,该单片机只接收地址帧,对数据帧不理睬;而当SM2位为0时,该单片机接收所有发来的消息。具体通信过程如下:①首先将主、从单片机工作方式选为模式3,所有从机的SM2位开始置1,处于只接收地址帧状态。②主机接收主单片机1发来的数据帧,从中提出数据部分(m个字节的指令对应m个舵控单片机),根据序号在控制指令字节前加上一个字节的地址信息。然后主机依次通过串口向下发送各舵控单片机的地址字节和数据字节。发送一帧地址信息,包含8位地址,第9位为1,表示发送的帧为地址帧。③从机接收地址帧后,进入中断,将发来的地址与自身比较;地址一致的从机就是被寻址的从机,它清除SM2位,接收主机发来的所有后续帧信息(数据信息)。未寻址的所有其他从机仍维持SM2=1,对主机发来的数据帧不理睬,直到发来新地址帧;之后在下一次中断时被寻址的从机接收主机发来的数据信息(第9位为0)。
需要注意的是,如果对已经寻址的从机再发送地址帧,则该从机SM2=1,恢复初始状态,和其他从机竞争。
(3)舵控信号PWM波的产生
对飞艇舵机的控制最终是通过舵控单片机产生PWM波来实现的。通常,产生PWM波不外乎硬件和软件两种方法。考虑到舵控单片机计算任务不大,本系统中采用软件产生PWM波的方法。下面以定时器0产生PWM波为例,说明通过软件产生PWM波舵控信号的实现方法。
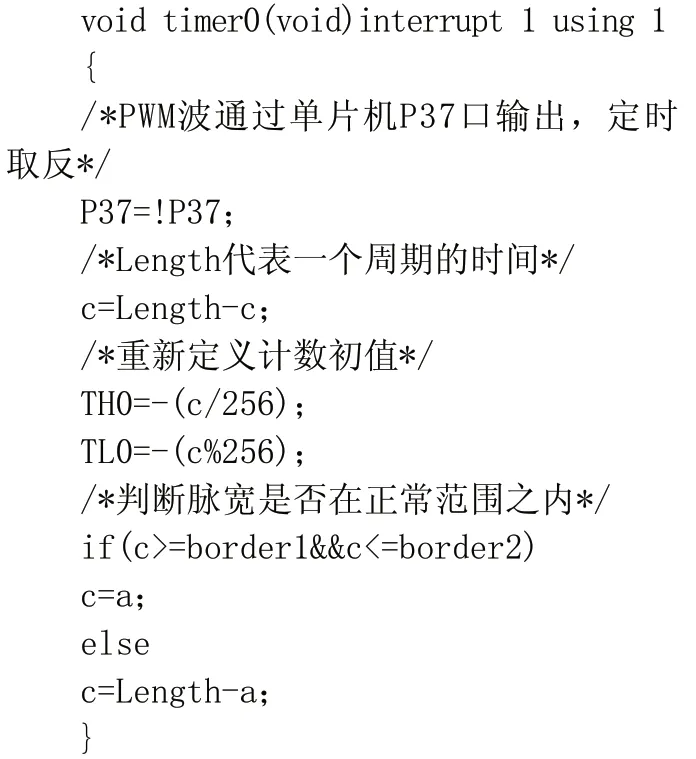
在程序中,由串口中断接收上位机发送的脉宽指令,继而通过改变入口参数a来调整PWM波的脉宽,并确保脉宽输出在正常范围之内。通过该方法产生PWM波切实可行,简单有效,可以广泛应用于舵机控制信号的产生中。
[1]张晴,袁晓梅,罗凯.基于PWM信号遥控机器人的设计与制作[J].数字技术与应用,2010(10).
[2]冯晓伟,王雷阳,李正生.多路舵机控制PWM发生器的设计与Proteus仿真[J].现代电子技术,2011(11).
[3]韩佳冷.液体流量控制器的研制[D].吉林大学,2011.
[4]陈海宴.51单片机原理及应用[M].北京航空航天大学出版社,2012.
