合成孔径聚焦技术在TOFD检测中的应用
2012-05-14,,,
,,,
(广东省超声电子重点工程技术研究开发中心,汕头 515041)
超声衍射时差法(TOFD)是通过接收缺陷端部的衍射信号对缺陷进行检测的方法[1]。TOFD技术可以对焊缝中缺陷的位置以及尺寸进行判定,被证明是最适合检测裂纹类面状缺陷的方法[2]。利用该方法进行D扫描时,由于换能器的声束有一定的覆盖范围,即使缺陷不在两个换能器连线的中垂线上,在缺陷附近很大范围内的A扫信号中仍然会含有缺陷的冗余信息,从而致使TOFD图像的横向分辨率很低,无法对缺陷进行准确地定位和定量[3]。
合成孔径聚焦算法(SAFT)最先用于合成孔径雷达技术,用以提高雷达图像的横向分辨率,其优势在于即便在低指向性和低工作频率下,依然可以获得很高的方位分辨率[4]。目前,该算法逐渐在超声无损检测领域得到了发展和应用。
笔者根据TOFD技术的D扫描过程中换能器对和缺陷端部的动态几何关系[5],建立了D扫描图像的SAFT-D算法的数学模型,并以该模型为基础,基于信号的延时同相叠加原理,设计了D扫描图像的合成孔径聚焦算法[6]。试验结果表明,通过SAFT-D聚焦算法,有效地实现了D扫描图像的重建以及缺陷的精确定位和定量,显著地提高了图像的横向分辨率。
1 试块及检测系统
用电火花加工方法在高强铝合金试块底面制作了不同深度的人工窄槽来模拟焊缝中的横向缺陷。采用无偏置D扫描方式,扫描方向平行于窄槽方向。试验所用工件、探头布置以及扫描方向如图1所示。D扫描图像利用CTS-1008 pl us TOFD探伤设备获取,系统采样频率为160 MHz。所用探头为一对TOFD探头,其晶片直径为6 mm,中心频率为5 MHz,声束在工件中的折射角为60°。探头与工件之间采用机油耦合。
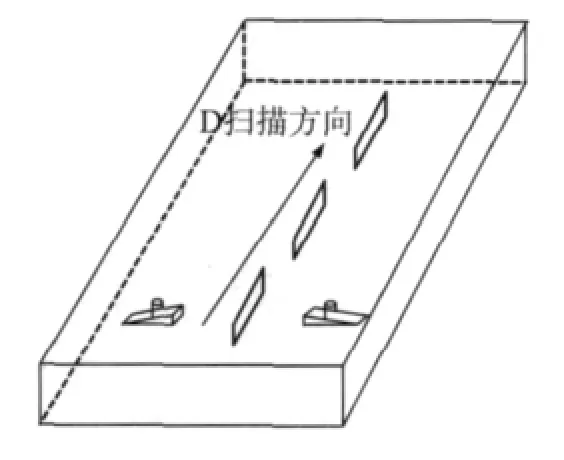
图1 超声TOFD法的D扫描方式
2 超声TOFD法D扫描工作原理
超声TOFD法D扫描图像由一系列A扫描信号依次排列构建而成,其生成过程见图2。当探头对在A-A′位置时,系统收到窄槽尖端衍射出来的A扫描信号Xn-1;当探头对平行焊缝经过一个步长ΔS扫描至位置B-B′处,此时窄槽端部在两探头连线的中垂线上,系统收到衍射A扫描信号Xn;当探头沿着扫描方向再经过一个步长到达C-C′处,系统收到窄槽尖端的A扫描信号为Xn+1。由图2所示的探头对和缺陷端部构成的几何关系可以知道,当探头对处于B-B′位置时,缺陷的衍射A扫描信号Xn比其两侧的衍射信号更早接收到。很明显,在B-B′位置接收到的衍射信号Xn才能真正地为定位裂纹端部的深度以及横向位置提供准确的信息。由上面整个过程可以看出,探头对不在缺陷的正上方时,系统同样可以接收到同一缺陷的A扫描信号,因此这一系列A扫描信号在形成D扫描图像时,就导致了D扫描图像分辨率很低的问题,而无法准确定位缺陷的深度以及横向位置。

图2 D扫描图像生成示意图
3 D扫描图像的SAFT-D重建算法数学模型
将图2中探头对与缺陷相对位置关系的几何模型简化,如图3所示。

图3 探头对和缺陷端部的几何位置关系
图中2S为两探头声发射点间距;O~O′为缺陷埋深尺寸d;ΔS为探头对扫描步长。当探头对处于缺陷正上方B-B′时,接收到缺陷尖端O′处的衍射信号时间为:

当探头对处于A-A′位置时,接收到缺陷尖端O′处的衍射信号时间为:

将式(1)和(2)进行推广。对于两探头偏离缺陷正上方k个扫描步长处获得的A扫描信号X n+k,计算其衍射波去除探头延迟的到达时间相对于t n的延迟量Δt n+k。延迟公式如下:

在进行SAFT时移运算时,按上述求得的延迟量对参与SAFT运算的A扫描信号分别进行相应的时移。以侧向波信号出现的时间为参考,SAFT运算采用加窗处理。窗宽为参与平移求和运算的A扫描信号的个数;窗高选取侧向波开始,到变形波的底波结束。对D扫描图像,窗内的A扫描信号逐一做SAFT处理,其数学表达式为:

式中Xn(tn)为衍射波到达时刻为tn的A扫描信号X n经过SAFT处理后的返回信号;N为参与XnSAFT运算其两侧A扫描信号的个数,因此所加的窗宽度即为N+1;Xi(ti-Δti)为经过时移处理后的第i个A扫描信号,Δti为相应的时移。
分别对Xn-1和Xn两A扫描信号进行SAFT时移运算,运算结果如图4。对于偏离两探头连线中垂线处获得的A扫描信号,其时移运算结果会导致运算窗内各A扫描信号的缺陷衍射波梯队分布,如图4(a)所示。通过窗内各A扫描信号叠加及平均运算后,缺陷信号的幅值会很弱,甚至趋于零。对于在两探头连线中垂线处获得的A扫描信号,其SAFT时移运算使窗内各A扫描信号的缺陷衍射波在相同的时刻到达,如图4(b)所示。通过各A扫描信号叠加及平均运算后,缺陷信号的幅值仍然很强。

图4 A扫描信号的时移结果示意图
4 检测结果
对试块中的各个模拟缺陷实施TOFD法的D扫描,扫描参数为:两探头声入射点间距2S=64 mm,扫描步长B=0.47 mm,数据纵向精度A=0.22 mm。
图5(a)为试块的原始D扫描图像,图像包含信息有侧向波、缺陷回波、底面波以及变形波部分。
对图5(a)的原始D扫描图像进行SAFT-D重建处理。假设运算窗宽度用win表示,运算窗宽度分别设置为15和31。重建结果如图5(b)和(c)所示。图中显示,原始D扫描图像窄槽两端都出现半抛物线状的圆弧,这些干扰信息使得窄槽的两端很难去判断,给准确测量窄槽的长度带来了很大的问题。而且图像中含有大量的高频噪声,有可能会湮没图像中弱的回波信号,从而影响对于有用弱信号的判断。SAFT-D重建后的图像中,随着聚焦孔径的增大,图像中窄槽两端半圆弧状的干扰信息已经基本上被完全抑制掉了,提高了图像的横向分辨率,并且有效消除了原始图像中的高频噪声。
图5的重建结果表明,SAFT-D算法的聚焦效果受聚焦孔径大小即所加运算窗宽影响,孔径越大,聚焦效果越理想。但是,随着孔径的增加,聚焦算法的运算量也将增加。综合以上,经过多次测试试验,实际处理过程中SAFT-D算法的聚焦孔径选取30~40之间比较理想。
5 结论
(1)建立了超声TOFD法D扫描图像的SAFT-D算法的数学模型,为实现TOFD图像的合成孔径聚焦重建提供了依据。
(2)提出的SAFT-D算法选取的窗宽和高可调,既可以对整个D扫描图像区域进行全局聚焦,也可以对局部感兴趣特征区域进行局部聚焦,且算法已经进行了最优化处理,实现了实际意义上的一键SAFT功能。

图5 试块的原始D扫描图像和SAFT-D处理后的图像
(3)该算法在消除TOFD图像干扰信息的基础上,还可以起到平滑滤波、消除图像噪声的效果,提高TOFD图像的信噪比。
(4)总结出SAFT-D算法的聚焦效果与聚焦孔径以及算法复杂度之间的关系。聚焦孔径越大,聚焦效果越好,运算复杂度越高。
[1]迟大钊,刚铁,袁媛,等.面状缺陷超声TOFD法信号和图像的特征与识别[J].焊接学报,2005,26(11):1-4.
[2]Sicard R,Goyette J,Zellouf D.A SAFT algorithm for lamb wave imaging of isotropic plate-like structures
[J].Ultrasonics,2002(39):487-494.
[3]Schmitz V,Chakhlov S,Müller W.Experiences with synthetic aperture focusing technique in the field[J].Ultrasonic,2000(37):731-738.
[4]Spies M,Jager W.Synthetic aperture focusing for defect reconstruction in anisotropicmedia[J].Ultrasonics,2003(41):125-131.
[5]Elbern A W,Guimar L.Synthetic aperture focus technique for image rectauration[J].NDT Net,2000,5(8):83-89.
[6]Johnson A J,Barina B A.The effects of surface mapping corrections with synthetic-aperture focusing techniques on ultrasonic imaging[J].IEEE Trans,1983,30(5):432-439.
