广东飞来峡库区水深遥感*
2012-05-09陈启东邓孺孺何颖清
陈启东,邓孺孺,秦 雁,何颖清,汪 伟
(1.中山大学 地理科学与规划学院,广东 广州 510275;2.广东省东江流域管理局,广东 惠州 516000)
传统的水下测深工作十分复杂,耗时且费力,部分地区环境条件恶劣等影响使测量工作更为不便。遥感技术具有覆盖范围大、周期性覆盖,及费用相对较低等特点,为动态获取大面积的水深信息提供了重要途径。
国内外在水深遥感方面做了大量研究,提出了许多模型和方法。在水深遥感模型建立方面,国外研究主要形成了经验模型[1-3]、半理论半经验模型[4-6]和物理模型[7]等。经验模型是利用统计方法,建立实测水深值与遥感图像光谱值关系,不需要水体内部光学特征,计算简便,是早期常用的方法,其缺点都是针对某一特定的水域,光谱与水深值相关性无法保证,随机性强,且需要大量的同步实测水深数据,耗费大量人力财力。半理论半经验模型在针对经验模型的缺陷,分析光在水体内部传输方程基础上,对模型进行了一定的简化,有些参数用常数代替,这些常数通常是通过统计得到的。物理模型主要是基于光在水体内的辐射传输方程,通过测量水体内部的光学参数来计算水体深度。物理模型物理机制明确,具有普适性,可以应用多波段数据,信息量丰富,而且全面考虑了水体各组分对水深遥感的影响,提高水深遥感精度。此外,物理模型并不需要遥感数据的同步实测数据,而同步实测数据的获取需要花费大量的人力、物力[8]。随着研究深入和相关测量技术的发展,水体光学参数的获取变得容易,这些优势使得物理模型有广泛应用前景。
从1980年代开始,国内在水深遥感方面也不断取得一些成果,水深遥感模型主要以经验模型和半理论半经验模型为主,任明达[9]利用Landsat MSS卫片进行了琼州海峡的海岸带水深遥感解译工作。平仲良[10]利用海水的透射率、后向散射系数、海底反射率与海面反射率之间的关系,推导出海洋遥感浅海水深的理论公式。文献[11]对MSS可见光波段的水体透视深度进行了深入研究。李铁芳等[12]在进行遥感实验研究的基础上,详细阐述了卫星遥感提供的水下地形、地貌信息的特征、机理,提出使用信息论和灰色系统论方法分析水深遥感信息传递的过程,建立了水深信息提取模型。张鹰、张东等[13]通过对Landsat-TM图像的TM2、TM4进行波段组合,建立了长江口南支水域的水深遥感模型,并利用非线性项对反演结果进行修正,提高了反演精度。田庆久等[14]以江苏近海辐射沙脊群海域为典型研究区,通过实测水深数据和水体光谱测量与分析,发现对应TM3和TM4波段的水体光谱反射率对水深信息敏感,对0~15 m水深,预测水深和实测水深之间拟合较好。
本文研究区位于广东省清远市,珠江流域北江干流上,处于北江中游和下游的交界处。所处的北江流域属亚热带气候,高温多雨。水库处于丘陵河谷地段,两岸多低矮垭口,岸坡平缓;全长73 km,最宽处2 km,最窄处仅178 m,水深一般在30 m以浅,为热带北缘的河流峡谷型水库。由于飞来峡水库面积大、形状成狭长型且库区两岸多是山区,可以发挥遥感技术“大范围、快速、全面、周期性重复覆盖”的特长,及时取得水深数据。本文采用基于物理机制的水深遥感模型,使用SPOT5多光谱遥感数据,选用相关敏感波段提取研究区水深分布信息。
1 水深遥感模型
1.1 水深遥感原理
水深遥感原理主要基于光线对水体的透射,在可见光波段穿透性较好,可见光衰减系数决定了水深遥感可探测的深度。而衰减系数是由水中杂质类型和含量决定的,对于清洁水体,蓝绿色光对水体的穿透性最好,当水体变混浊时,水体中泥沙浓度的增大,一方面使得光的透射深度减小,另一方面增强了水体的后向散射,使得水体反射率总体增大,且反射峰向长波方向移动,从而使清水和浊水的光谱特征具有较大差异。污染水体,对光的吸收能力强,使水体反射率变小,图像颜色较暗。当水中叶绿素浓度增加时,蓝光的光谱反射明显下降,绿光和近红外波段反射率增大。当大气、水面、悬移质和底部物质反射不随空间变化时,水体总辐射强度则随水深加大而减弱[14]。
卫星传感器所接收的光辐射主要由3部分组成:水-气界面的镜面反射光、水体的后向散射光及水底的反射光。在通常情况下,镜面反射很强,很容易接近或超过正常水体反射率的量级,故它在水体光谱中不能忽略,同时这部分光谱不带有任何水体信息,因此为了提高水深遥感反演精度,必须消除水面镜面反射影响[15]。光在水中传播过程中受到水分子及水中各种悬浮物质的散射和吸收作用而被衰减,形成水体散射光,这部分能量与水中杂质的性质和含量以及水深有关,它携带了绝大部分的水体信息。水底反射光除了与水体散射、吸收性质有关外,更取决于水深、水底的反射率,是探测水深及水底底质遥感的基础。
1.2 水深遥感模型
消除水面镜面反射后,传感器接收到的离水反射率Rwo应包括水分子和水中悬浮颗粒物的散射光Rws和水底反射光Rg(λ)[15],即:
Rwo=Rws+Rg(λ)
(1)
二者在水中传播过程中受到削减,纯水的散射率和吸收率是恒定的,含杂质水体的散射和吸收率随其性质发生变化,且在不同波段的变化是不一样的。研究区影响离水反射率因素主要是水中悬浮泥沙和叶绿素。
假设表底层水体介质均匀一致,即消光系数恒定,仿照大气光学厚度,引入水体光学厚度τ(λ)概念[16],水体沿太阳光入射方向的水体光学厚度τ'(λ)=(α+β)h/cosθz,沿观测方向光学厚度τ(λ)=(α+β)h/cosθv。其中α=αw+Dsαs+Dcαc为水体总的吸收系数,等于水分子、悬浮泥沙与叶绿素的吸收系数之和,αw、αs、αc分别为水分子、悬浮泥沙与叶绿素的吸收系数;Ds、Dc分别为水中悬浮泥沙和叶绿素的浓度,β=βw+Dsβs+Dcβc为水体总的散射系数,βw、βs、βc分别为水分子、悬浮泥沙和叶绿素的散射系数,θz、θv分别是水中入射光和出射光的天顶角。如果只考虑一次散射,水深h处的薄层水的散射对离水辐亮度的贡献为:
(2)
对于水深为H的整层水体,散射对离水辐亮度的贡献可通过对上式积分得出:
(3)
即:
(4)
其中,ω(Θ)=βwPw(Θ)+DsβsPs(Θ)+DcβcPc(Θ),μ=secθz+secθv,Pw(Θ)、Ps(Θ)、Pc(Θ)分别为水分子、悬浮泥沙与叶绿素的散射相函数,散射角Θ可由公式cos(π-Θ)=sinθzsinθvcosφ+cosθzcosθv得出,φ是太阳和传感器方位角之差,H为水深。
同理根据水体的反射的物理机制,可以求出水底反射光对水体离水辐亮度的贡献为:
(5)
(6)
Rg(λ)=Rbe-μ(α+β)H
(7)
其中,Rb为水底反射率,将(6)、(7)式代入(1)式,由此可得出整层水体的离水反射率:
(1-e-μ(α+β)H)+Rbe-μ(α+β)H
(8)
由于水中悬浮泥沙吸收对水体光谱影响微小,可以忽略悬浮泥沙的吸收作用;水中藻类叶绿素的散射可以当作是各向均衡的朗伯体散射,不必考虑它的散射相函数Pc(θ),即认为Pc(θ)=1,式(8)可简化为:
·
[1-e-(α+β)μH]+Rbe-(α+β)μH
(9)
以式(9)为所建立的水深遥感模型,Rwo为经过大气纠正和去镜面反射光并转化为反射率的遥感数据像元值,所有的吸收率和散射率均可通过测试获得。未知数有泥沙浓度Ds、叶绿素浓度Dc及水深H。理论上通过3个波段遥感数据,建立三元方程组可以求解出这三个未知数,但是由于指数项中含有未知数,实际上直接求解式(9)比较困难。本文分两步来求解水深,首先通过分析水体光谱特点,可见光中蓝绿光对水体的穿透性较好,离水反射光中含有较丰富的水底信息,而在近红外波段,水体对其强烈吸收,光线难以穿透水体,基本上只反映水体表面信息。所以本文先选用红光和近红外2个波段,其穿透水体能力有限故可以忽略水底的影响,即认为(9)式中水深趋于无穷大,这时式(9)可以简化为:
(10)
红光和近红外又是对水体中泥沙和叶绿素敏感的波段,将这2个波段的遥感数据代入(10)式,即可得到一个二元一次方程组,解之可求悬浮泥沙浓度Ds和叶绿素浓度Dc。再选用对水体穿透性较好的蓝绿光波段遥感数据,将前面求出的悬浮泥沙浓度Ds和叶绿素浓度Dc代入(9)式,求解其一元方程,就可计算出水深H。
2 飞来峡水库水深遥感反演
本文采用遥感数据是2007年10月23日飞来峡库区SPOT5多光谱图像,分辨率是10 m,中心位置为东经113°7′36″,北纬24°0′9″,成像时太阳天顶角为40°,传感器观测角为23.5°。由于水体反射率偏低,采集的信息均集中在图像的低值区,受到仪器性能和大气等因素影响,图像辐射值产生的误差对水深遥感影响极大,故本文首先需要对获取的遥感图像进行精确的辐射纠正和大气校正。辐射纠正将遥感图像DN值转化为辐亮度后再转化成反射率图像,并消除与地表实际反射率之间的误差。大气校正方法是采用多暗像元大气校正方法,即以暗目标减法(DOS)为基础,结合大气辐射传输模型,在遥感影像上选取10个浓密植被阴影区作为暗像元,并计算其所对应的大气校正系数,通过插值得到整幅图像大气校正系数,由于其不依赖任何外部信息,并且考虑了大气的非均质性,校正精度较高,具体方法参考文献[17-18]。
2.1 吸收和散射参数的确定
水的吸收、散射参数可以直接测定,也可以用遥感数据计算。本文采用的纯水吸收、散射参数见表1。水分子散射类型是瑞利散射,散射相函数可有公式(11)求出。
(11)
其它吸收系数、散射系数与散射相函数可以直接测得,本文所使用的水体各组分参数如表1所示。
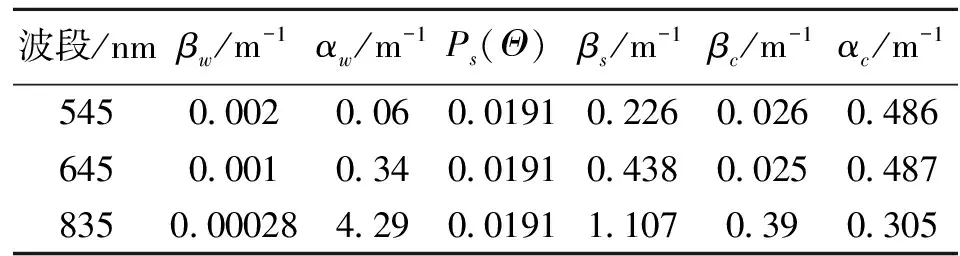
表1 飞来峡水库水深遥感定量模型参数表
2.2 水深信息的提取
为了提取水体信息,需要通过建立掩膜图像,对遥感图像进行水陆分离,去除各波段的陆上信息部分,提取水体部分。水面镜面反射与波长无关,对短波红外波段的XS4,水为强吸收,因此每个波段减去XS4可消除镜面反射[15]。去水面镜面反射光后像元值为出水光谱的反射率。
选用XS2、3波段即红光和近红外波段,代入式(10)求解出泥沙和叶绿素浓度(结果如图1、2),然后选用穿透水体能力强的绿光XS1波段,将所求得泥沙和叶绿素浓度值代入式(9),求出水域水深值H。以上方法均可以采用PCI Geomatica 9.0软件实现。利用ArcGIS软件,对水深图像进行密度分割,绘制水深遥感制图(如图3)。
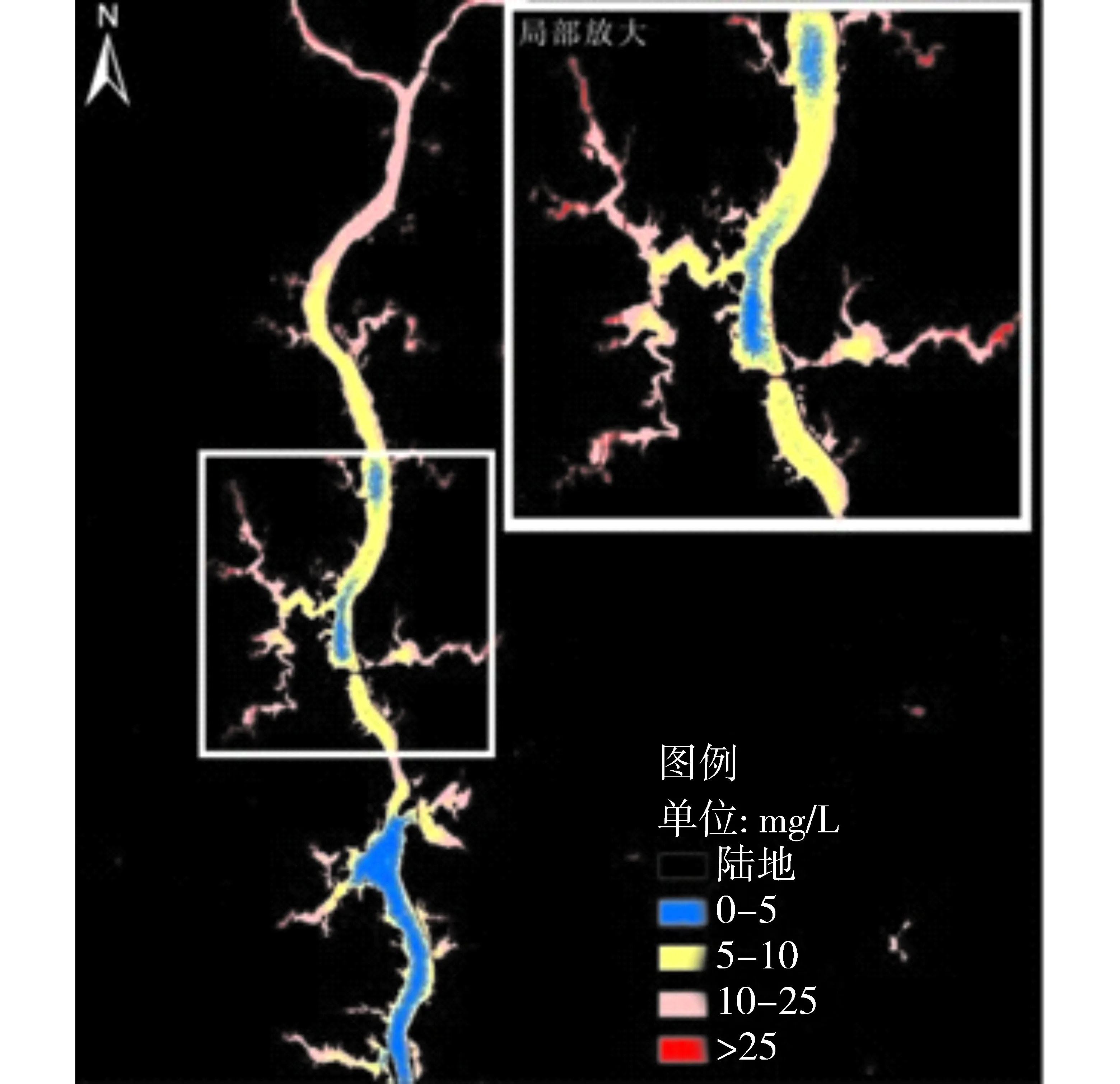
图1 飞来峡水库悬浮泥沙浓度分布图

图2 飞来峡水库叶绿素浓度分布图
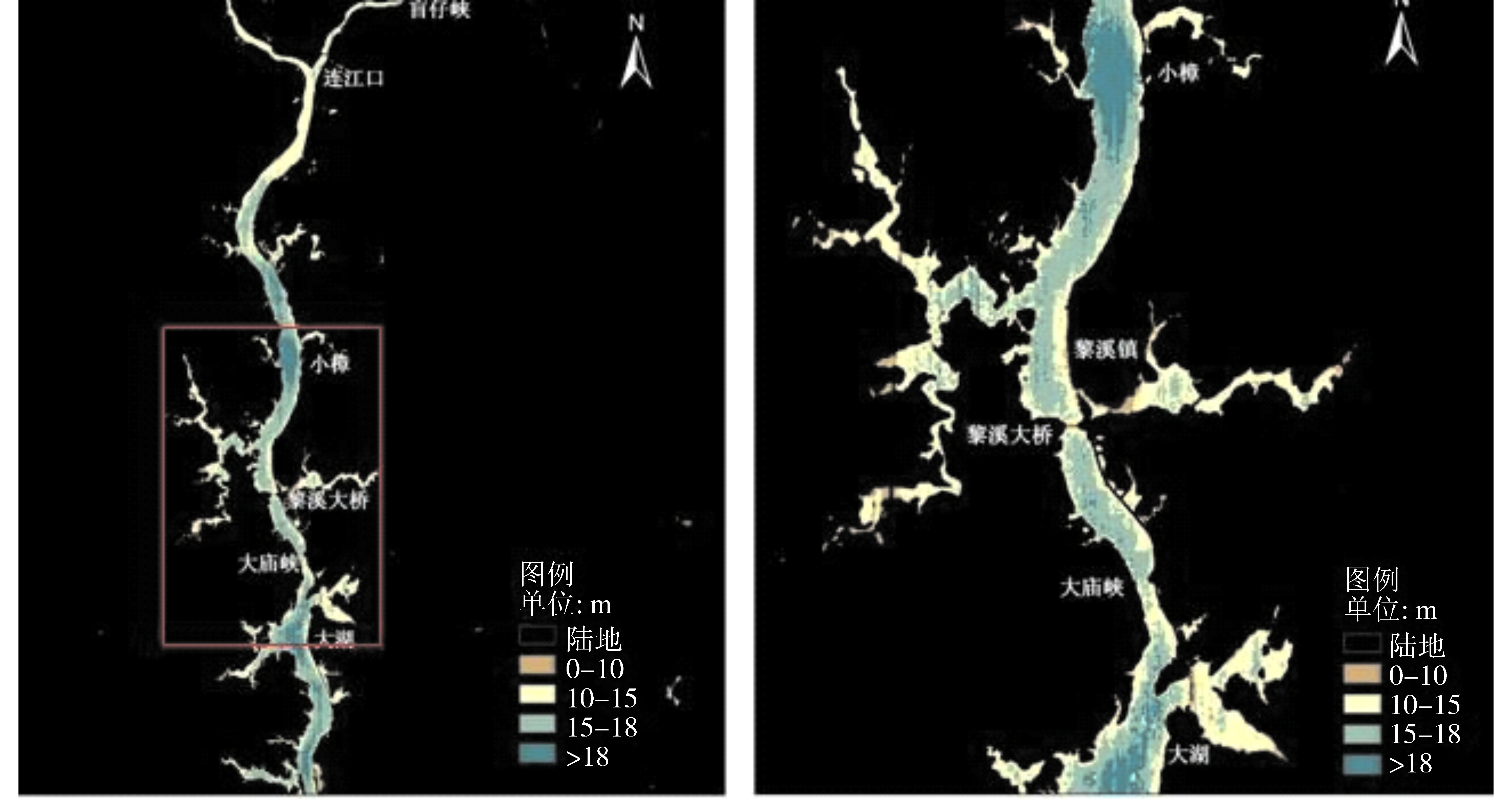
图3 飞来峡水库水深分布遥感图
2.3 结果精度分析
飞来峡水库主河道局部地区由于采砂活动,水体受搅动变得很浑浊,在库湾水域受到养殖等人类活动影响,富营养化现象突出,这些因素会影响水深遥感反演精度,本文考虑了这些因素影响,并且计算出泥沙和叶绿素浓度空间分布,使得水深反演精度提高。
为定量检验计算结果的精度,取库区10个样点的水深值来进行检验,结果如表2。平均相对误差为13.73%,最大相对误差为27.94%。误差较大的有盲仔峡2、大庙峡、大湖和小樟4个样点,其中盲仔峡2和大庙峡两个样点是处于峡谷位置,水深较深,反演水深值误差稍大,反映进入水底的太阳光已较弱,接近遥感可探测水深。大湖和小樟样点靠近较密集居民区,考虑到局部水质情况的多变性,水深反演结果符合要求。
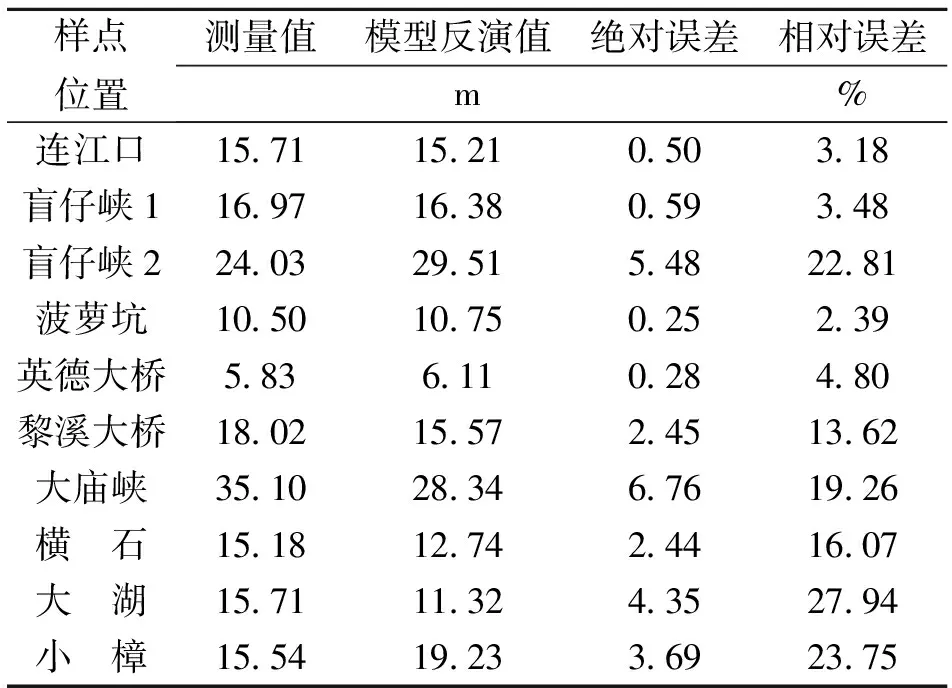
表2 模型反演值和实测值比较及误差分析
3 飞来峡水库水深分布特征分析
飞来峡水库是河道型水库,从图3可以看出,水库水深总体分布是主河道中心水域较深,一般在15 m以上,沿岸附近水体稍浅,库湾水域水深比主河道要浅,符合实际情况。对遥感水深结果图进行统计,图幅范围内水深等级及其面积分布如表3所示,图幅范围水域总面积为25.15 km2,水深主要分别在10~15 m,占水域面积42.86%。主河道在大湖、大庙峡、小樟和盲仔峡四处水域河道水深较深,最深处达到20 m以上,其中大庙峡和盲仔峡是峡谷,历史演变中河床不断下切,水库库底高程低,水深比较深。
影响水库水深因素除了建坝时库底自然高程外,主要有库区采砂活动和泥沙淤积程度。飞来峡大坝建成后,除枢纽下游近坝段产生冲刷外,其余河段均为淤积,适当采砂对行洪、减少库区淤积和改善通航条件是有利的,水利部门在大湖和小樟两处在一定时期设为河沙可采区,采砂活动频繁,采砂量大于淤积量,水深逐渐变深。但近年来受利益驱动,河道采沙呈现向上游转移的趋势,库区内禁采区违法采砂现象经常发生,由于河砂超采造成河道下切,对江堤的安全构成严重威胁。黎溪镇是人口较稠密的居民区,沿岸人类活动较多,附近水域淤积加大,河道沿岸附近水深变浅。库湾地区由于网箱养殖活动以及上游来水影响,水体富营养化现象严重,在自然条件下,随着河流夹带冲击物和水生生物残骸在湖底的不断沉降淤积,水深变浅。
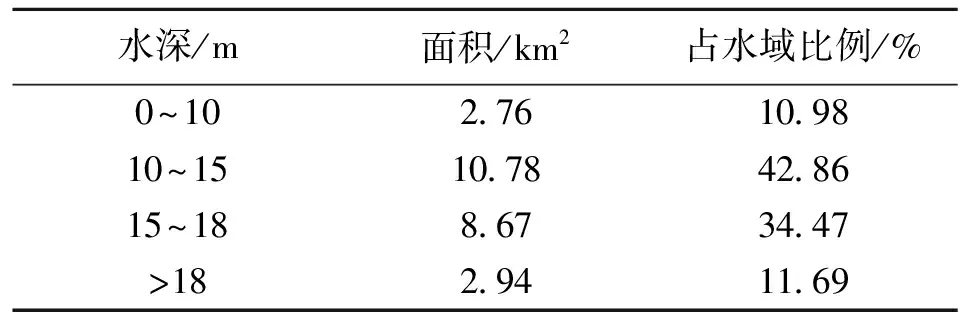
表3 水深等级面积分布
4 结 论
1)分析太阳光在水体中传输的物理过程,充分考虑水中各成分对太阳光传输过程的消光影响,并利用数学建模方法表达影响离水反射率各组份,推导出水深遥感模型;
2)由于模型是基于物理机制,物理意义清晰明了,具有普适性,能适用于不同的地区,不需要大量同步实测数据,节省大量成本。采用多波段数据求解模型水深,信息量丰富而且综合考虑了泥沙浓度和叶绿素含量对水深反演的影响,水深遥感的精度得到提高;
3)针对直接求解模型中水深参数比较困难,本文通过深入分析影响水体光谱的各种因素在不同波段贡献的差异,选用对水体穿透能力差而对泥沙和叶绿素敏感的红光和近红外波段,求出泥沙和叶绿素浓度分布。再选用对水体穿透能力强的波段,将已经求出的泥沙和叶绿素浓度代入模型,计算出水深;
4)本文采用较高空间分辨率SPOT5多光谱遥感图像,通过实地测量和计算得到模型中有关水体光学参数,代入水深遥感模型,反演出水深分布图,验证平均相对误差是13.73%;
5)模式的假设前提是一次散射及一次反射,以及未考虑水底底质的空间差异,在实际应用中,会带来一定误差。随着高空间、高光谱、高辐射分辨率遥感技术的发展,对水深遥感监测的技术方法和应用将会不断地深入开展,尤其需要进一步解决水中其它杂质如重金属对传感器探测到的水深信号的影响。
致谢:感谢广东省飞来峡水利枢纽管理处提供水深验证数据。
参考文献:
[1]LYZENGA D R.Passive remote sensing techniques for mapping water depth and bottom features [J].Applied Optics,1978,17(3):379-383.
[2]LYZENGA D R.Remote sensing of bottom reflectance and water attenuation parameters in shallow water using aircraft and Landsat data [J].International Journal of Remote Sensing,1981,2(1):71-82.
[3]CRACKNELL A P,IBRAHIM M.Bathymetry studies on the coastal waters (Red Sea)of Jeddah,Saudi Aribia,using Shuttle MOMS-01 data [J].International Journal of Remote Sensing,1988,9(6):1161-1165.
[4]POLCYN,F C,LYZENGA D R. Calculation of water depth from ERTS-MSS data[C]∥Proceedings Symposium on Significant Results Obtained from ERTS-1.New Carrollton,Maryland,1973:1 433-1 436.
[5]TANIS F J,HALLADA W A.Evaluation of Landsat Thematic Mapper data for shallow water bathymetry [C]//Proceedings of 18th International Symposium on Remote Sensing of Environment.Michigan,USA,1984:629-643.
[6]TANIS F J,BYRNE H J.Optimization of multispectral sensors for bathymetry applications [C]//Proceedings of 19th International Symposium on Remote Sensing of Environment.Michigan,USA,1985:865-874.
[7]LYZENGA D R.Shallow-water reflectance modeling with applications to remote sensing of ocean floor[C]//Proceedings of 13th International Symposium on Remote Sensing of Environment.Michigan,USA,1979:583-602.
[8]王艳姣,董文杰,张培群,等.水深可见光遥感方法研究进展[J].海洋通报,2007,26(5):92-101.
[9]任明达.琼州海峡幅卫片的多光谱解译[J].海洋与湖沼,1981,12(3):210-224
[10]平仲良.可见光遥感测深的数学模型[J].海洋与湖沼,1982,13(3):225-229.
[11]梁顺林,陈丙咸.遥感可见光波段的水体透视深度研究[J].环境遥感,1989(3):56-62.
[12]李铁芳,易建春,厉银喜,等.浅海水下地形地貌遥感信息提取与应用[J].环境遥感,1991,6(1):22-29.
[13]张鹰.水深方法遥感研究[J].河海大学学报,1998,26(6):68-72.
[14]田庆久,王晶晶,杜心栋.江苏近海岸水深遥感研究[J].遥感学报,2007,11(3):373-379.
[15]邓孺孺,何执兼,陈晓翔,等.珠江口水域水污染遥感定量分析[J].中山大学学报:自然科学版,2002,41(3):99-103.
[16]刘小平,邓孺孺,彭晓鹃.悬浮泥沙定量遥感综合模式及其在珠江口的应用[J].中山大学学报:自然科学版,2005,44(3):109-113.
[17]齐志新,邓孺孺.多暗像元大气校正方法[J].国土资源遥感,2007,2:16-19.
[18]何颖清,邓孺孺,陈蕾,等.复杂地形下自动提取多暗像元的TM影像大气纠正方法[J].遥感技术与应用,2010,25(4):532-539.