舰载搜索雷达稳定平台控制系统设计
2012-04-25程小平
程小平
(船舶重工集团公司723所,扬州 225001)
0 引 言
舰载搜索雷达稳定平台为雷达天线提供了一个不受船体摇摆干扰的安装平面,使雷达方位角与大地坐标保持一致,是影响雷达战技性能的重要组成部分之一。随着现代电子技术的发展,雷达稳定平台控制系统不断向小型化、数字化方向发展。本文从工程应用角度出发,利用大规模可编程器件——现场可编程门阵列(FPGA)和面向运动控制数字信号处理(DSP)芯片为硬件基础,采用改进型比例积分微分(PID)控制算法,实现了高可靠、高精度的全数字、小型化稳定平台控制系统设计方案。
1 系统组成和硬件设计
舰载搜索雷达稳定平台控制系统接收舰艇摇摆信号,并检测平台实时摇摆角度,由此得到误差信号来执行控制算法,控制平台快速跟踪船体的纵横摇摆,使平台保持水平,其原理框图如图1所示[1]。系统采用交流伺服电机为驱动执行单元,以驱动器为电机功率驱动部分,以无刷双通道旋转变压器为位置检测单元,以旋转变压器数字转换器(RDC)模块实时解算纵横摇位置信号,以FPGA和DSP芯片为核心完成控制系统数据管理、计算。
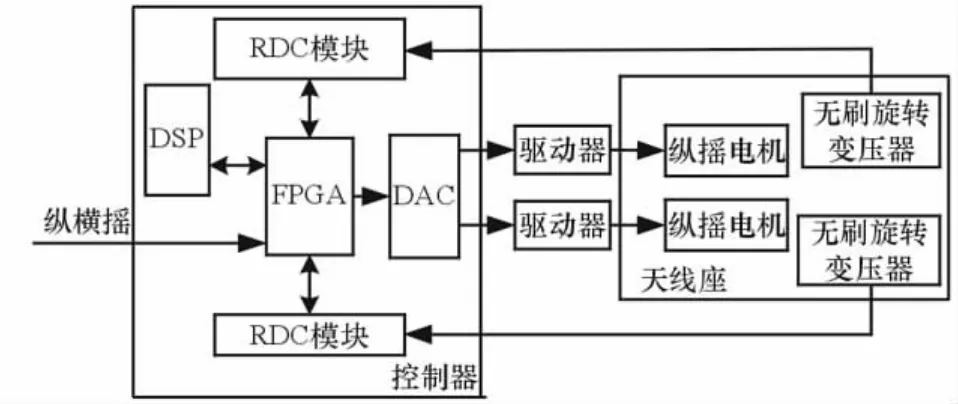
图1 稳定平台系统原理框图
系统中DSP芯片采用的是TMS320C28X系列TMS320F2812芯片,该系列DSP芯片面向运动控制领域设计,集微控制器和高性能DSP的特点于一身,具有强大的控制和信号处理能力,能够实现复杂的控制算法,特别适用于有大批量数据处理的测控系统[2]。FPGA 芯片选用 Cyclone II系 列 芯 片EP2C6。数/模转换器(DAC)选用具有四通道D/A转换功能的芯片DAC7725,同时转换纵、横摇指令信号。
2 改进型PID控制算法原理[3]
随着PID控制算法的发展,数字PID控制发展为各种改进、复合算法,是一种最普遍采用的控制方法。在数字系统中,离散PID算法的表达式为:
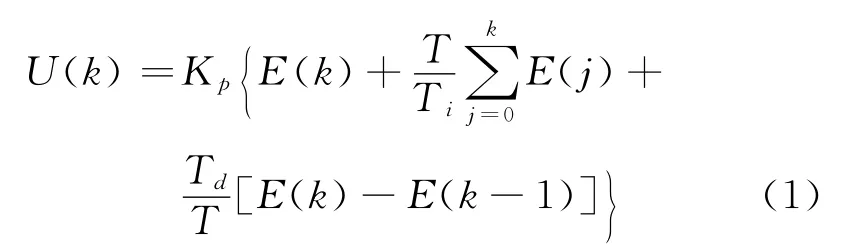
式中:U(k)为第k次采样时控制器输出;E(k)为第k次采样时的偏差值;E(k-1)为第(k-1)次采样时的偏差值;K p为控制器的比例系数;T i为控制器的积分时间;T d为控制器的微分时间。
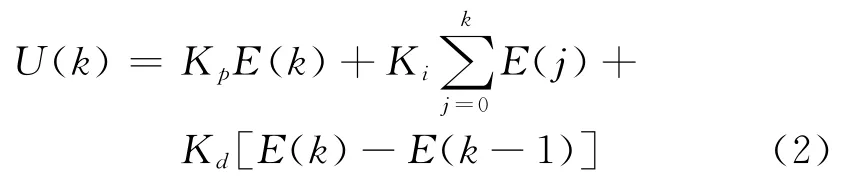
取K i=K p T/T i,K d=K p T d/T,则有:
在实际的控制系统中,普通的PID控制算法往往不能满足系统需要。为了舰载搜索雷达稳定平台的控制精度和跟踪性能,运用智能控制的思想改造普通PID算法,系统中复合运用了积分分离、抗积分饱和、不完全微分的PID控制算法。
积分分离控制的思想是:当系统误差较大时,采用比例微分(PD)控制,取消积分作用,以避免产生大的超调量,同时使系统有较快的响应速度;当误差较小时,采用PID控制,引入积分作用,以保证系统的控制精度。
积分分离控制算法可表示为:
式中:参数β为积分项的开关系数,为根据实际情况设定的误差阀值。
抗积分饱和算法是为了防止系统由于一个方向的偏差而使控制进入饱和区,其思想为:在计算U(k)时,先判断上一时刻U(k-1)是否已经超出限制范围。若U(k-1)>Umax,则只累加负偏差;若U(k-1)<Umin,则只累加正偏差。该算法可避免控制量长时间停留在饱和区。
不完全微分PID控制算法的运用可改善系统性能,相当于在PID算法中加入1个一阶惯性环节(低通滤波器)Gf(s)=1/(1+T fs),其结构如图2所示。
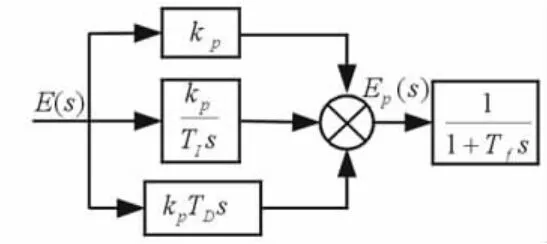
图2 不完全微分结构
总控制输出写成微分方程离散化为:

结合使用上述几种算法,能使稳定平台控制达到最佳性能,同时根据舰载搜索雷达稳定平台工作实际情况,把稳定平台控制系统分为开机归零、正常摇摆、关机归零、错误状态归零几个区间,分区间设定PID参数,以实现PID参数的最佳调整。
3 系统软件实现
3.1 FPGA软件实现
系统的软件设计包括FPGA软件和DSP软件设计,根据FPGA芯片功能,其软件设计框图如图3所示。
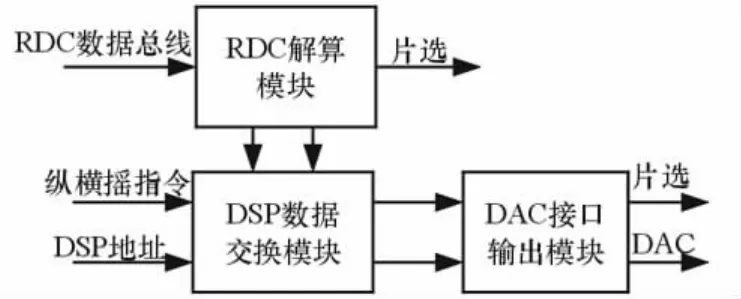
图3 FPGA软件框图
FPGA芯片接收舰艇摇摆信号、依据RDC模块数据解算纵横摇实时位置信号、输出PID运算结果、与DSP交换数据等程序主要由RDC解算模块、DSP数据交换模块、DAC接口输出模块3个部分组成。
系统启动时,FPGA程序同时接收外部纵横摇指令数据和解算稳定平台位置数据,通过DSP数据交换模块实时与DSP芯片交换数据,把DSP计算后的PID数据经DA接口输出模块送给外部DA器件,经DA器件处理后送给相关输出口。
同时,FPGA程序还包括其他逻辑判断、组合程序,以完成稳定平台控制系统的I/O口管理、平台其他检测、加电等逻辑控制。
3.2 DSP软件实现
DSP软件由主程序及用户中断程序组成,主程序按固定周期调用用户中断程序,整个程序包括初始化模块、平台状态检测模块、后台循环模块、定时器中断模块。DSP控制软件流程图如图4所示。
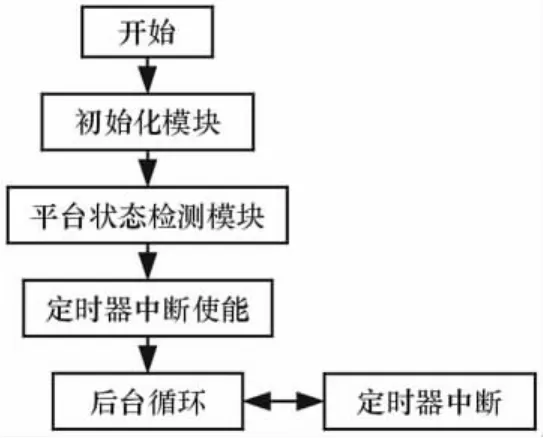
图4 DSP控制软件流程图
系统启动后,程序首先进入初始化模块,完成系统寄存器、定时器、控制系统参数的初始化设定,然后检测平台状态(正常、限位、故障等),打开定时器中断使能,进入后台循环模块,在循环程序中判断平台工作区间(开机归零、工作摇摆、关机归零、错误状态归零),并相应设置PID参数、变量值。循环的同时主程序按固定周期进入定时器中断程序,在中断程序中调用PID计算子程序,完成PID控制算法计算。
DSP软件的核心部分为改进型PID控制算法的实现,即定时器中断模块中调用的PID计算子程序部分,根据改进型PID控制算法原理编制,其流程框图如图5所示。其中误差阀值和不完全微分系数根据稳定平台系统实际在调试中调整设置。
4 系统性能测试
系统性能测试时,由外部模拟器仿真舰体纵、横摇摆指令信号,装订纵摇指令为±6.5°幅度、4 s时间周期正弦波,横摇为±15°、6 s时间周期正弦波。稳定平台系统软硬件设计时,设定误差增益1°对应6 V,即K=6 V/°,在若干摇摆周期内测量其误差电压均方根值E,代入(E/K)×(π/180)×1 000换算成毫弧度表示的摇摆误差。误差测试结果如表1所示。其中Er、E p分别为纵、横摇摇摆误差,v为雷达天线扫描速度。
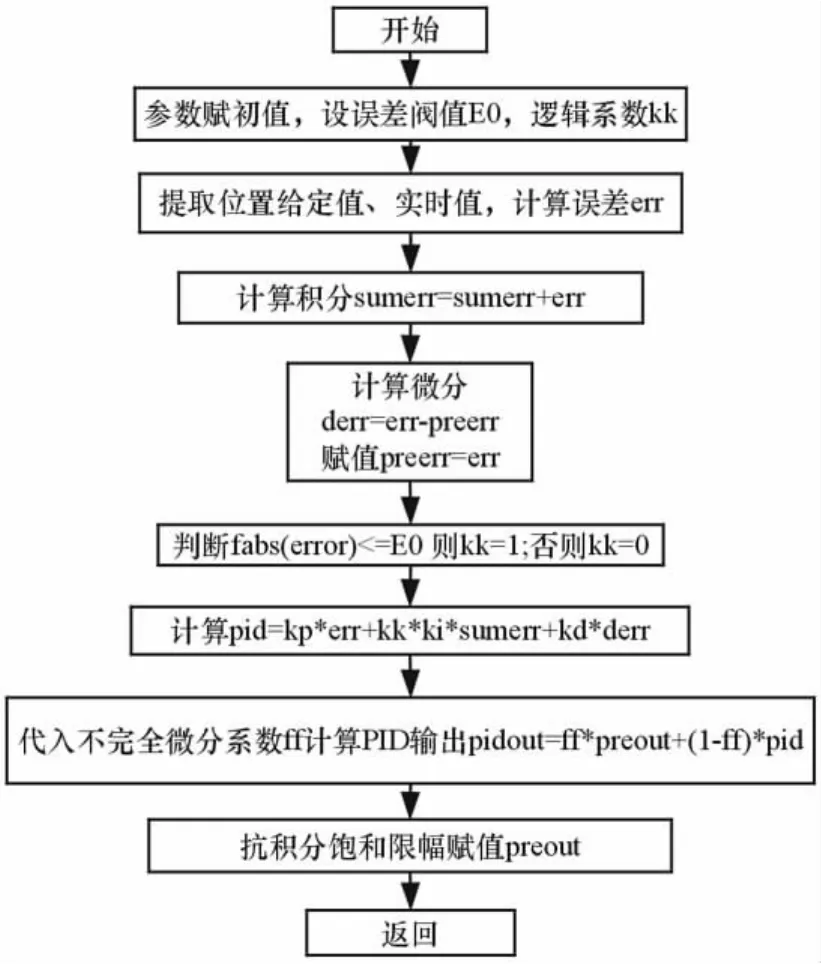
图5 控制算法实现程序流程图

表1 稳定平台纵横摇摆误差表
由表1可看出,雷达天线转速越低,天线转动对稳定平台性能影响越小。当天线以最高转速60 r/min转动时,稳定平台系统误差也只有0.931 mrad,远远小于系统指标3 mrad。
5 结束语
本文所述的舰载搜索雷达稳定平台控制系统,基于FPGA和DSP芯片全数字化处理,硬件组成简单,可靠性高,采用了改进型的PID控制算法,系统响应速度快,跟踪精度高。该稳定平台控制系统已成功应用于某装备中,经过了一系列的试验考验,性能稳定,工作可靠。
[1]曹正才.一种新型高精度舰载雷达伺服控制系统的设计[J].雷达与对抗,2001(3):54-62.
[2]三恒星科技.TMS320F2812 DSP原理与应用实例[M].北京:电子工业出版社,2009.
[3]刘金琨.先进PID控制 MATLAB仿真[M].北京:电子工业出版社,2005.