基于LARK特征提取的人脸检测方法
2012-04-23谭晓阳
王 寅,谭晓阳
(南京航空航天大学计算机科学与技术学院,江苏南京 210016)
人脸检测是将图片中人脸的位置、大小和中心找到并标记出来,目前已有很多算法可以检测。但早期的人脸识别算法多是在一个已经得到的人脸图像或较容易即可获取的人脸图像上进行,致使这些算法无法在使用过程中对图像做出更好的分析和判断。随着人脸识别的应用范围不断扩展,人脸检测逐渐发展起来。
1 LARK方法
一般的图像分析方法在学习过程中需要大量的训练样本,但在训练的过程中会导致训练的参数出现过拟合。检测过程中对目标图像中与示例相类似对象间的差异无法很好地避免,使检测效果降低。H.Takeda,S.Farsi和 P.Milanfarz于2007年发表的关于使用核回归进行图像处理和重建文章[1],其中讲述了使用回归模型方法,对噪声图像的特征进行提取和分析,借此恢复图像的原状或者简化压缩工作的流程。该方法可以减小由信号或噪声模型等造成的影响。其中经典核回归算法

式中,z是回归函数;yi表示第i个采样点在xi处的观察值;εi表示独立同分布零均值噪声;P表示邻域中采样点的个数。
尽管经典核回归具有较好的性能,且易理解,但因为数据局部线性变化而存在限制。之后H.J.Seo和P.Milanfar发表了关于使用 LARK(Locally Adaptive Regression Kernels[2])进行物体检测的文章。其中介绍了将LARK方法用于提取图片的特征并引用到对象识别中。这个方法对捕捉基本数据的局部结构很有效,对图片中各点的灰度并不敏感,相对图片中灰度值和图形的变化较为敏感。
1.1 LARK计算方法
使用LARK提取的图片特征首先要计算图片片段的局部核。局部核是通过计算图片片段中的每个像素点的协方差矩阵C,之后通过协方差矩阵计算每个点的核值,再由片段中所有像素点的核值组成局部核。而协方差矩阵C可以将图片片段中图形形状和灰度值的变化情况记录下来。
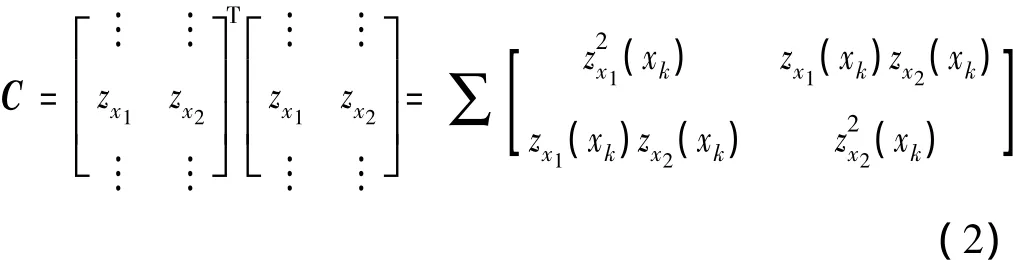
根据图片中每个像素点的协方差矩阵C计算局部核函数K(·)。其描述如式(2)所示

其中,xl=[x1,x2]是空间坐标;P2是局部窗口的像素数(P×P)。方向矩阵Hl定义为

其中,h是全局平滑参数,x对于任意取样位置x存在一个分析窗口;Cl是该窗口中的空间向量集合(x1,x2)的梯度向量的协方差矩阵。方向矩阵Hl可以根据图片中当前位置的几何结构修正局部核的形状和大小。根据这样的方向矩阵,选择高斯函数K(·)并引入计算公式中得到

1.2 权值向量矩阵
将根据图片片段计算出的局部核归一化之后得到权值向量,然后将图片中各片段的权值向量按列序排列成矩阵,得到整个图片的权值向量矩阵。单个图片片段的权值向量wi的计算方式如下
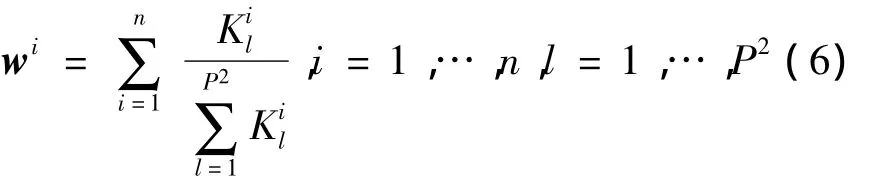
其中,n是图片中片段的个数;P2是局部片段的像素数。
将单个片段的权值和向量w∈RP2×1。按照片段在图片中的位置,按列序组合在一起,得到权值向量矩阵W∈RP2×n。其计算方式如下

通过观察示例图片的权值向量矩阵,可以看出,使用LARK对图片的特征进行提取可以很好地描绘图片中图形的变化和位置关系,并捕捉到其细节。图中所示人脸几个位置的权值向量。

图1 人脸几个位置的LARK核
2 基于LARK的人脸检测系统
由于LARK在特征提取方面的优势,将这种特征提取的方法应用到人脸检测当中。尝试使用一个确定的人脸图像作为示例样本,然后对其他含有人脸图像的图片进行检测,构成的检测系统流程如图4所示。
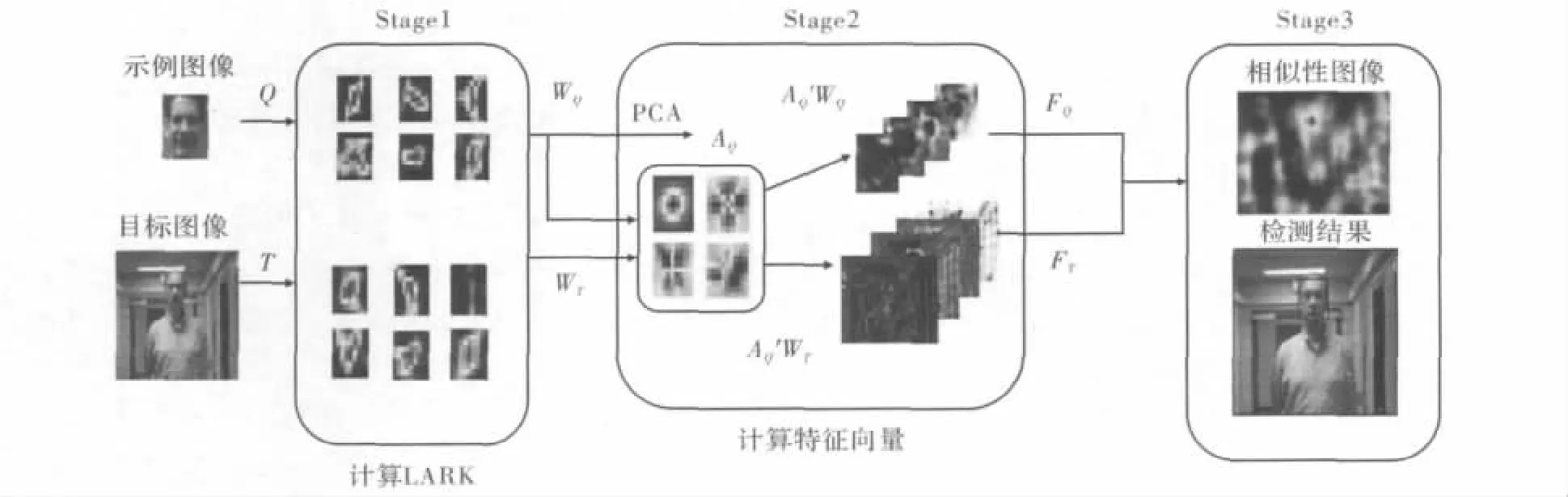
图2 使用LARK构成的检测系统流程
2.1 示例图片和目标图片的权值向量矩阵
其中,n为图片Q与Tj中的片段个数;P2是局部片段的像素数。图2为示例图片Q与目标图片T中区域Tj的部分权值向量图示。

2.2 降维并计算特征向量矩阵
在计算特征矩阵的过程中,使用PCA进行降维,可以保证特征辨别能力的同时降低计算特征的维度。通过PCA保留主成分中前d项构成矩阵AQ,根据AQ计算得到特征矩阵。其计算形式去下

分析特征的过程也就是衡量FQ与FTj之间的相似度的过程,采用了余弦相似度度量,该方法可以真实地反应两个向量在变化方向上的差异,也克服了传统的欧氏距离对于向量角度度量的缺点。并确定目标图片中是否包含与示例相似的图片。计算方式为

2.3 获得相似度图像及人脸区域信息
(1)获得相似度图像。通过使用构造函数f,在单个向量间相似度ρi的基础上构造相似性的图像,之后通过相似度图像分析人脸图像的位置信息。构造函数原型如下

对于 ρi和 ρi∈[-1,1]时,其值越接近 -1或 1时,表示向量的夹角越接近0°或180°,图形的走向越相似;它的值越接近0时,表示向量的夹角越接近90°,图形的走向越背离。
(2)根据相似度图像获取人脸信息。得到相似度图像之后,将其存放在矩阵S中。用矩阵S中元素的最大值分别减去S中各个元素之后将得到新的矩阵S'。其中矩阵中S'值<0.06的点的位置被认为是目标图像中人脸所在区域的左上角点的坐标,其大小和示例图像等同。
在实际的检测过程中,由于目标图像中人脸大小的不确定性,可根据变化后大小不同的示例图像确定相似度图像,也就是在不同尺寸的示例图像下可得到多个相似度图像。按照上述确定人脸位置的办法,将在不同尺寸下得到不同的人脸位置信息,并对这些信息进行处理。
3 实验结果与分析
使用LARK构成检测系统的过程,只需根据示例图片找到目标图像中与其相似的图区域。在检测时,先将需检测的图像转换为灰度图像再进行检测,这样既可以完整地表示人脸的各部分特征,同时更易于处理,还可以减少计算量。
图3中展示了使用同一示例图片在构造的人脸检测系统上进行测试的结果。由此可以看出,以同一图片作为示例的情况下,其中一个较为准确。造成检测结果不准确的可能性有两个:(1)示例图像提取特征的局限性,它并不能代表所有人脸图像的特征,因此在后续的检测过程中可能出现偏差。(2)在使用示例图像比对目标图像的疑似区域时出现偏差,也就是目标图像中有很多与示例图像相似的区域对检测结果造成干扰。虽然LARK可以很好地描述图像的图形特征,但由于上述两种因素的影响,可以在对图片进行遍历之前将可能的区域进行预选。这种特征提取方法在提取特征时计算速度较慢,检测过程中其计算速度并不理想。
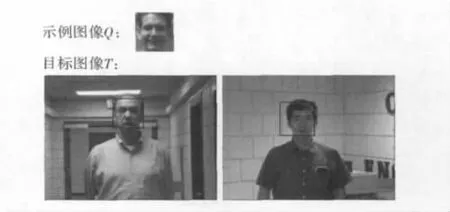
图3 使用同一示例图片在构造的人脸检测系统上进行简单测试的结果
[1] TAKEDA H,FARSIU S,MILANFAR P.Kernel regression for image processing and reconstruction[J].IEEE Trans on Image Processing,2007,16(2):349 -366.
[2] SEO H J,MILANFAR P.Training - free,generic object detection using locally adaptive regression kernels[J].IEEE Trans.on Pattern Analysis and Machine Intelligence,2010,32(9):1688-1704.
[3] VIOLA P,JONES M.Robust real- time object detection[J].International Journal of Computer Vision,2004,57(2):137-154.
[4] VIOLA P,JONES M J.Rapid object detection using a boosted cascade of simple features[C].Proceeding of IEEE Conf.Computer Vision and Pattern Recognition,2001,1:511 -518.