中型组足球机器人抗干扰系统的研究
2012-03-27钱晟毛丽民张亚飞浦宇欢
钱晟,毛丽民,张亚飞,浦宇欢
(常熟理工学院电气与自动化工程学院,江苏常熟 215500)
中型组足球机器人抗干扰系统的研究
钱晟,毛丽民,张亚飞,浦宇欢
(常熟理工学院电气与自动化工程学院,江苏常熟 215500)
提出了结合RGB和HSI色彩空间的颜色算法以减少光照干扰,基于HSI颜色模型对图像进行二值处理消除噪声;根据实际现场环境,选取最佳方案消除场周围的颜色干扰.实际运行测试表明了该方法的有效性.
视觉系统;颜色模型;干扰
在中型组足球机器人系统中,视觉系统是一个至关重要的系统.机器视觉就是用摄像机代替人眼来做测量和判断.机器视觉系统将被摄取目标转换成图像信号,传送给图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号[1];图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作[2].本文对中型组足球机器人在比赛中可能遇到的若干种干扰因素进行了分析,对视觉系统存在的问题进行研究并提出了改进方法,使改进后的视觉系统有较高的识别精度,并能减少环境的干扰.
1 光照抗干扰
1.1 HSI图像处理
HSI图像处理方法和流程见图1.
1.2 图像颜色空间模型
颜色空间模型是指某个三维颜色空间的一个可见光子集,里面包含了某个颜色域的所有颜色.颜色通常用三个相对独立的属性来描述.三个独立变量综合作用,于是就构成一个空间坐标,也就是颜色空间.使用三个不同的属性描述颜色就产生了不同的颜色空间.但被描述的颜色对象本身是客观的,不同颜色空间只是从不同的角度去衡量同一个对象颜色空间.颜色空间按照基本结构可以分两大类,基色颜色空间和色、亮分离颜色空间.比较常用的有RGB空间、HSI空间[3].

图1 HSI图像处理流程图
RGB(Red,Green,Blue):按照光学理论,红,绿,蓝可以混合在一起得到绝大部分色彩,红,绿,蓝被称为三原色,三原色是相互独立的,其中任何一个原色都不能由另外两种原色配出,这样可以保证配色范围是最大的,按照这一原理建立的色彩模型叫做RGB彩色模型,在应用上即称为RGB颜色空间[4].HSI:HSI彩色空间采用色度H,饱和度S,亮度I来表示像素颜色,即HSI颜色空间.这样目标的色度和亮度相互独立,系统的稳定性得到提高[5].两者的对比详见表1.
1.3 颜色模型变换算法
给定一幅RGB彩色格式的图像,每一个RGB像素和H、S、I分量可用下面的公式得到,其中R、G、B值的范围在[0,1][6]:

式(1)中H分量是决定颜色的重要因素,当它发生变化时,色调值也将变化.亮度I对应成像亮度和图像灰度,是颜色的明亮程度.首先亮度分量与色度分量是分开的,I分量与图像的彩色信息无关,其次是H及S分量与人感受彩色的方式紧密相连(这里强调了颜色的重要性,因为人对光的感知还与I分量有关).
HSI模型是比较合适的图像处理空间,这样可以避免光照带来的干扰.摄像机采集的图像为RGB模型,需要将其进行转换[7].

表1 颜色空间对比
2 物体颜色杂质抗干扰
2.1 二值处理
一幅图像包括目标物体、背景还有噪声,要想从多值的数字图像中直接提取出目标物体,最常用的方法就是设定一个阈值T,用T将图像的数据分成两部分:大于T的像素群和小于T的像素群.这是研究灰度变换的最特殊的方法,称为图像的二值化.二值处理前后的图像效果见图2和图3.

图2 二值处理前图像图
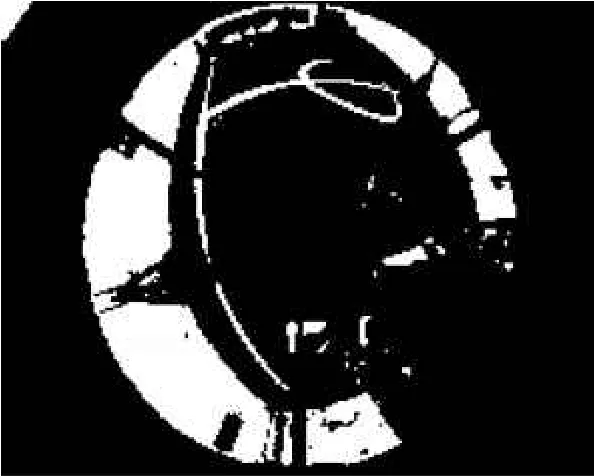
图3 二值处理后图像
2.2 腐蚀处理
腐蚀和膨胀是两个互为对偶的运算[8].腐蚀是一种消除边界点,使边界向内部收缩的过程.令A,B是离散欧几里德Z2空间的子集,A为二值目标,B为结构元素,A被B腐蚀计为AΘB,定义为:

其中Bx表示B平移了矢量x后的变换.上式表明A用B腐蚀的结果是所有x的集合,其中B平移了矢量x后仍在A中.换句话说,用B来腐蚀A得到的集合B是完全包含在A中时B的原点位置的集合.
算法可总结为三点:(1)用3×3的结构元素,扫描图像的每一个像素.(2)用结构元素与其覆盖的二值图像做“与”操作.(3)如果都为1,结果图像的像素为1,否则为0.
对图4进行二值化处理,然后用结构元素与二值图像“与”操作,得出如图5的效果.
2.3 颜色空间HSI阈值选取
把机器人放置于场地的中心、球门前的几个位置,然后采集全景图作为颜色标定图像,这些图像包括了在此光照条件下各种颜色的分布情况,具有一定的代表性.将图像在HSI色彩空间的颜色分布图上用手动的方法画出一些方框,选定几种感兴趣的颜色的阈值范围,包括球、绿色场地、白线等.手动选取阈值过程见图6.为了保证阈值的通用性,选择了一个阈值之后,需要在其他几幅图像中进行实验反复调整阈值,直到对于大部分的标定图像都能识别出感兴趣的颜色区域,并去除掉无关的颜色干扰.但是考虑到球和光照角度变化的影响,必须为阈值宽度保留适当的余度.
基于颜色信息在HSI空间采用阈值法分割目标,主要是确定目标区域的六个阈值,它们分别代表目标区域颜色的H,S,I分量的最小阈值和最大阈值.

图4 腐蚀处理前图像

图5 腐蚀处理后图像

图6 手动选取阈值过程
在图像区域中有一像素点a(Ha,Sa,Ia),可以利用下式进行判断:

如果符合(4)式的三个条件,可判定像素点a是目标素点.
3 场地周围干扰
若周围其他物体刚好和球的颜色相近也会产生干扰.例如在阈值标定时,场外的红色物体会与红色球一起标定起来,从而造成干扰.
足球机器人最主要的识别目标是球,如果对球进行颜色分割[9],会需要较多时间,而且很难实现.在比赛中,不管是球还是机器人都是运动的,这样不能在合理的时间里检测到目标,会影响机器人的实时性要求.为了提高效率,对带有球的图像进行分割的时候,采用分区种子扩充法.
先把整幅图像分为若干个子区域,以每个子区域的中心为基点,然后向四周扩散.求取以长方形中心点的方法来确定球的重心.
图7为球的平面图,取A为种子点,然后向上下左右四个方向进行扫描,则得到A1,A2,A3,A4这4个边界点,将这4个边界点连起来形成一个长方形,这个长方形的中心点就是球的重心.子区域块的大小一般以球的直径的四分之一为边界的正方形组成.在填充的同时也要计算处理色块的重心,在确定边界点时需考虑坐标分布,若相对边界点的距离超过球直径的长度,就说明是干扰点.球的分割过程如图8所示,从左往右,从上至下的网络中心扫描像素点,找到目标颜色后向四周扩散.
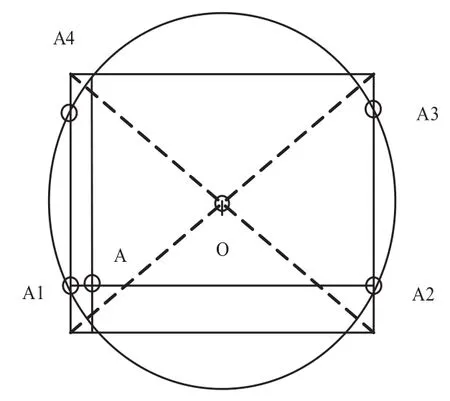
图7 球的平面图
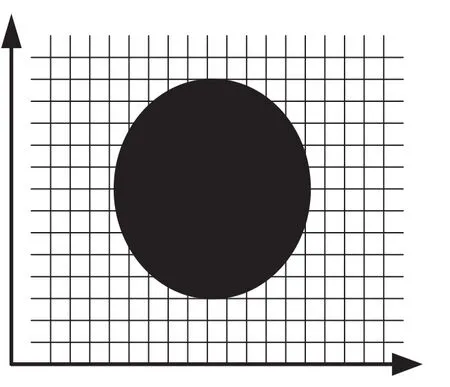
图8 球的分割过程
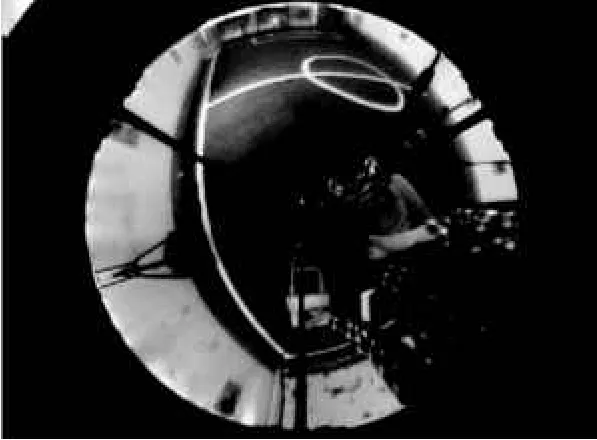
图9 RGB采集的图片

图10 经过HSI转化过后采集的图片

图11 绿色场地1
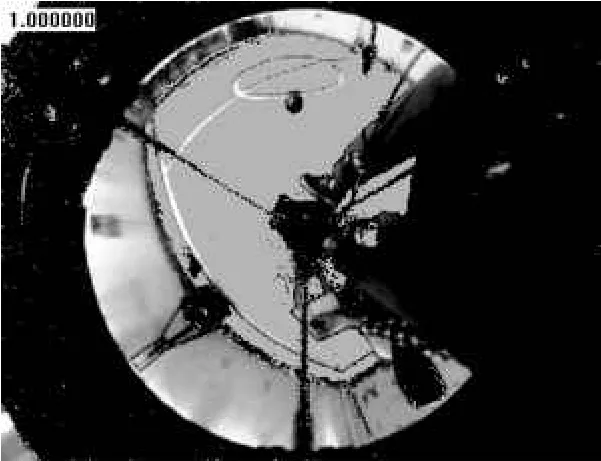
图12 绿色场地2

图13 球1
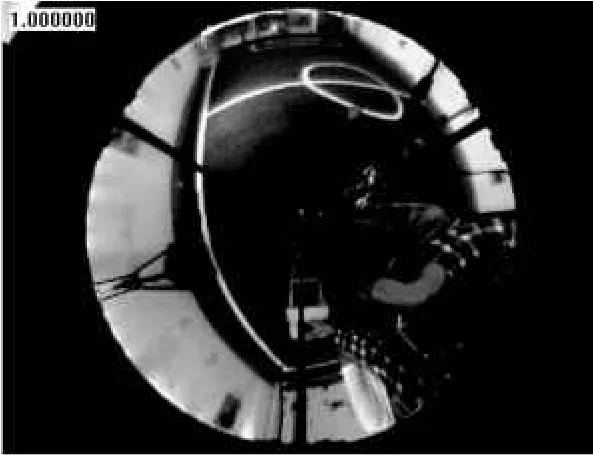
图14 球2
4 测试结果
抗光照干扰测试:对比图9和图10可以看出,在直接从摄像机采集到的RGB图像上,场地外的窗户有阳光,场地中央也留有一束阳光,可以观察到场地颜色有所失真,特别是场地白线和周围白墙都有些偏绿,对稍微远一点的物体颜色偏差很大.而经过转换后采集的图像就不同,同样的干扰环境,图像各物体颜色与人的肉眼所观察到的基本一致,各物体颜色变化细微,满足对光照问题的抗干扰要求.
对比图11可看出,由于饱和度范围的增加,绿色场地的标定更加准确.图12在选取适当的S阈值后能把图11中有差异的场地颜色块也标定进去.
由图13可看出,标定范围过大,将有差异的色块也标定进去增加识别度。图14通过改变S阈值,从而避免了对识别球的外界干扰.理想的饱和度范围应该只标定球场中的红色球而不识别其他相近颜色物体.
如图15、16所示,白色场线2通过调节H、S值把白色场线1中场线未标到的地方也标定进去.
中型组足球机器人需要满足实时性和准确性,在以上方法中最合适的就是利用坐标来判断是球还是干扰.对于足球机器人,根据其识别的球场线建立坐标系,并确定球场的范围,当识别物的位置坐标超过了球场的最大范围即判断为干扰,否则识别为球.根据比赛的规则,当球出界,机器人会在边线处停止,此时球也可视为干扰.
以旅行家Ⅲ中型组足球机器人为平台,利用坐标判断球的方法在实际应用中是可行的,对场外红色能起到很好的抗干扰作用,即使在对球的阈值标定时将其他红色标进去也不受影响.

图15 白色场线1

图16 白色场线2
5 总结
中型组机器人在比赛中可能会遇到各种干扰因素,给视觉系统带来不同的影响.通过RGB颜色模型对HSI颜色模型进行转换,可减少光照强度变化和光照分布不均匀对系统的影响.通过开运算处理来解决目标物体颜色杂质所形成的干扰.通过实验,对图像中绿色场地、白色场地、球等感兴趣的颜色区域都能准确识别出来.
[1]郭成果.全方位移动机器人视觉子系统的设计与实现[D].杭州:浙江大学,2006.
[2]陈溟.足球机器人彩色图像对光照不变性研究[D].青岛:中国海洋大学,2011.
[3]杨璟,朱雷.基于RGB颜色空间的彩色图像分割方法[J].计算机与现代化,2010(8):148.
[4]李铁军.RoboCup中型组机器人视觉系统的研究与开发[D].济南:山东大学,2006.
[5]田国会,尹建芹,宁春林,等.足球机器人视觉子系统及其关键问题[J].山东工业大学学报,2002(1):88.
[6]袁奋杰,周晓,夏军.基于FPGA的RGB和HSV色空间转换算法实现[J].电子器件,2010(4):494-496.
[7]徐春梅,王春,耀刘跃.基于机器视觉系统的颜色识别[J].机械设计与制造,2011(8):257.
[8]黄樟灿,陆昊卷,李亮.彩色图像去噪方法讨论[J].计算机工程与科学,2001,23(4):16.
[9]王泽兵,杨朝晖.彩色图像分割技术研究[J].电视技术,2005(4):20.
A Study of Medium-sized Group of Soccer Robots Anti-jamming System
QIAN Cheng,MAO Li-min,ZHANG Ya-fei,PU Yu-huan
(School of Electrical and Automation Engineering,Changshu Institute of Technology,Changshu 215500,China)
The vision subsystem is one of the most important parts in the football robot system.The vision subsystem mainly includes real-time,accuracy and adaptability.This paper completes the anti-interference processing mainly from three aspects.The First is light interference.The paper uses a color extract algorithm which combines RGB color space and HSI color space.Using RGB color model to collect image,it is transformed into HSI color model immediately.The HSI color model is not sensitive to light,so it can be used for color calibration.The second is the color impurity.Based on the HSI color model,the picture is dealt with to eliminate the noise by erosion and dilation.The authors of this paper select the most appropriate spatial color model conversion to reduce impurities interference effects.The third is some color interference surrounding the match field. Some solutions have been reached in this paper.According to the actual environment,the best one is selected to eliminate environmental interference.The actual running tests show the effectiveness of the image process method.
vision system;color model;interference
TP368.1
B
1008-2794(2012)10-0095-05
2012-09-24
钱晟(1989—),男,江苏常熟人,常熟理工学院电气与自动化工程学院自动化专业2008级学生.
毛丽民(1981—),男,江苏常熟人,讲师,硕士,研究方向:机器人与目标跟踪研究,E-mail:maolimin_1981@163.com.