混合动力电动汽车方案设计与仿真研究
2012-03-23陈建文苏铁熊
陈建文,苏铁熊
(中北大学车辆与动力工程系,太原030051)
1 引言
能源供给和环境污染问题是21世纪全球面临的两大制约汽车工业可持续发展的重大难题。目前,保障能源供给已经成为世界许多国家的重大国策[1]。混合动力汽车采用内燃机和电力的联合驱动方式工作,节能环保,被公认为目前汽车产业面临的各种挑战的最佳对策之一。
2 混合动力电动汽车方案设计及匹配
2.1 方案设计要求
混合动力电动汽车方案设计主要有以下3个要求:(1)保证车辆动力性,提高燃油经济性,减少有害气体排放;(2)当一条驱动线路出现故障时,有备用线路保证车辆动力性和续驶里程;(3)车辆的能量转换和利用效率在较高区域。
2.2 结构设计及分析
根据上述要求,图1为混合动力汽车的结构示意图。其运行工况有以下几种:
(1)车辆起步、低负荷运行时,驱动线路为蓄电池-逆变器-电动机-变速器-传动轴-前驱动桥-前轮。
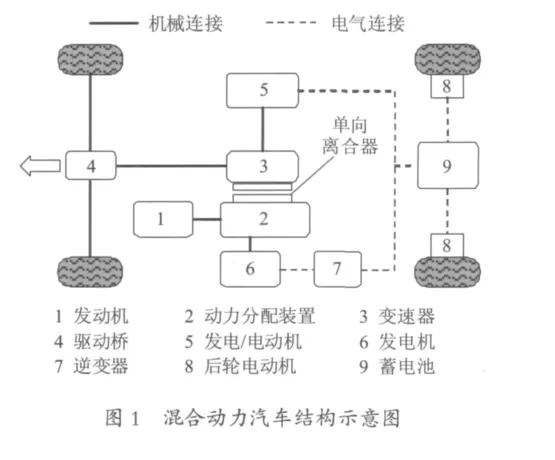
(2)正常行驶时,有2条驱动线路可选,分别为:发动机-动力分配装置-单向离合器-变速器-传动轴-前驱动桥-前轮;发动机-动力分配装置-发电机-逆变器-后轮电机-后轮。
(3)全负荷运行时,驱动线路3条并行:发动机-动力分配装置-单向离合器-变速器-传动轴-前驱动桥-前轮;蓄电池-逆变器-电动机-变速器-传动轴-前驱动桥-前轮;蓄电池-逆变器-后轮电动机-后轮。
(4)减速与制动时,制动能量回收线路为:前轮-前驱动桥-传动轴-变速器-发电机-逆变器-蓄电池;后轮-后轮电动机-逆变器-蓄电池。
(5)蓄电池充电时,线路为:发动机-动力分配装置-单向离合器-变速器-转动轴-前驱动桥-前轮;发动机-动力分配装置-发电机-逆变器-蓄电池。
(6)车辆停止时,2种可能线路为:发动机-动力分配装置-发电机-逆变器-蓄电池;发动机-动力分配装置-发电机-逆变器-汽车空调等[2~4]。
2.3 混合动力电动汽车动力源功率的匹配
电动汽车的整车总功率的确定是根据整车的动力性(最高车速、加速性能、爬坡要求)来确定的[5]。该设计电动汽车整车的动力性要求为:(1)车辆的最高车速vmax≥150 km/h;(2)0至100 km/h的加速时间t≤16s;(3)最大爬坡度i≥30%,v=25 km/h。
根据车辆最高车速vmax、加速性能和爬坡性能确定的最大功率分别为Pmax1=81.25 kW、Pmax2= 69.37 kW和Pmax3=69.53 kW,考虑到附加功率的消耗,此处取Pall≥90 kW。
(1)电池组参数的选择
该方案选取容量为84Ah的镍氢电池,设定车辆以纯电动方式行驶时的速度v=65 km/h,行驶里程S=100 km,计算得n≈32;功率需求方面,电池组的容量需要满足车辆纯电动行驶时电动机最大功率的需求,计算得n′=16;综合考虑,取n=34。
(2)电动机的参数选择
对于主电动机,其最大功率考虑以下2个因素:(1)车辆的最大爬坡度i≥15%;(2)0~100 km/h的加速时间t≤20 s。计算可得:Pmax=55.62 kW。
考虑附加功率消耗,取电动机功率Pmax≥60 kW。
对于辅助电动机,它的最大功率为汽车所需最大功率减去发动机的功率。主电动机选择永磁电动机,它的额定功率为40 kW,最高功率为62 kW;故辅助电动机选择轮毂式永磁电动机,额定功率为4 kW,最高功率为5 kW。
(3)发动机的参数设计
对于发动机:(1)最高车速vmax≥90 km/h;(2)最大爬坡度i≥15%,车速v=30 km/h。当vmax=90 km/h时,发动机功率P为48.75 kW;当最大爬坡度i=15%时,P′=45.78 kW。由此可取发动机功率P≥50 kW。
3 混合动力系统主要机构Simulink建模
3.1 Simulink整车模型
汽车在行驶时,总的阻力为

式中,
Ff——滚动阻力
Fw——空气阻力
Fi——坡度阻力
Fj——加速阻力
建立整车动力学模型。首先得到循环工况下车辆的速度和加速度请求,然后计算出总的阻力,最后向车轮提出车速和驱动力请求或功率请求。根据车轮功率和速度请求,控制器实时将需求动力信号分配给电动机和发动机两大动力源,将动力输出到车轮,驱动车辆行驶。基于以上理论的分析,整车Simulink模块图2所示。
3.2 Simulink制动控制策略模型
该混合动力电动汽车制动时,采用电和液压2种结合制动的形式。制动时,在保证安全性的前提下,为了最大化回收制动能量,增加车辆续驶里程,优先采用电制动;当车辆需要的制动力大于电制动所能提供的最大制动力时,电和液压制动系统共同制动,确保车辆行驶安全;当车辆紧急制动时,车辆在短时间内急需较大制动力,因此液压制动为主,电制动为辅,为车辆提供制动力。基于上述车辆制动控制策略分析,车辆制动Simulink控制策略模型如图3所示。
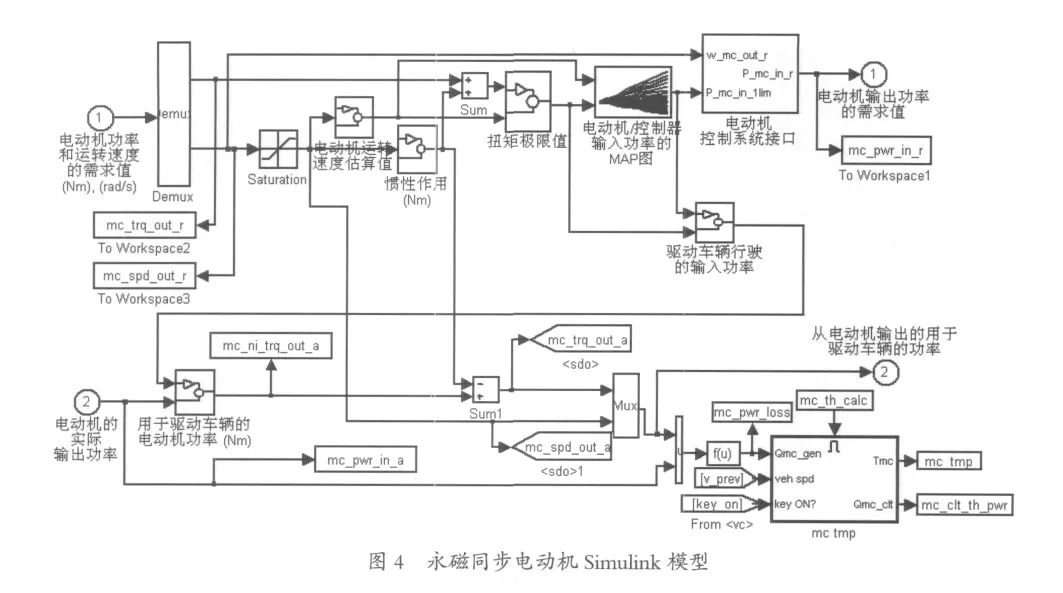
3.3 Simulink永磁同步电动机模型
混合动力电动汽车使燃油经济性和排放性显著改善的途径就是增加电能-机械能的驱动模式。而电动机负责驱动时电能转换成机械能以及减速制动时回收制动能量的作用。不同的工况,电动机要进行不同模式的转换,因此对于电动机的要求也越来越高。永磁电动机以高效率、高转矩密度、良好的转矩平稳性、低振动噪声以及在高速区域的弱磁控制能很好地满足车辆恒功率运行的要求,被认为是电动汽车电驱动系统的理想选择。永磁同步电动机Simulink模型如图4所示。

4 CYC_UDDS循环工况下整车性能仿真分析
选择由美国环境保护署EPA制定的城市道路循环CYC_UDDS进行整车性能仿真,仿真时间为1 369 s,里程12 km,最高车速90 km/h,平均爬坡度5%。在此参数条件设置下,仿真结果如图5、6。


从图6(c)可知,在CYC_UDDS道路循环工况下,电动机扭矩输出集中在20~100 N·m,峰值扭矩200N·m左右。而电动机最大转矩159N·m,工作区域所需扭矩<159N·m。另外,对于永磁电动机而言,其过载能力是其额定情况下的3倍,甚至更高,所以电动机可以正常工作,电动机选型合理。
如图6(d)所示,发动机工作时扭矩输出集中在45~85N·m,峰值扭矩接近于100 N·m,最终确定发动机最大功率为57 kW,最大扭矩为115 N· m。在CYC_UDDS循环工况下,发动机能够正常的工作,所以根据仿真结果,发动机选型合理。
CYC_UDDS循环工况,速度变化频率较高,范围较大,本次循环仿真中,共有17次停车,最高车速可以达到90 km/h,加速、减速较多,非常有利于制动能量的回收。
从图6(e)可以看出,发电机输出扭矩集中在0~25 N·m,并且变化幅度较小,这对于在频繁变速的情况下为动力电池充电非常有利,一方面可持续的为电池充电,增加续驶里程;另一方面,不会由于发电机瞬时功率的突然增大,对电池造成伤害,影响其使用寿命。
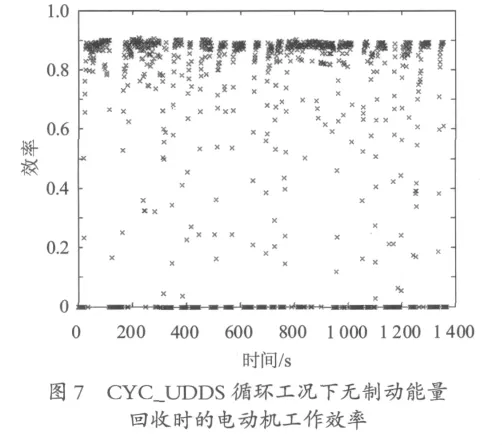
图7所示为车辆在CYC_UDDS循环工况下,无制动能量回收时的电动机工作效率图。仿真结果显示,电动机工作效率集中在0.8~0.9之间,处于一个较高的水平,电动机能够发挥其最大作用,因此,电动机和发动机的选型和协调工作,都比较合理。
5 结论
(1)燃油经济性
表1所示为混合动力汽车在CYC_UDDS循环工况下的能量消耗以及制动能量回收情况。结果表明,车辆在CYC_UDDS循环工况下的等效百公里油耗为5.9 L,节油率约为24%,节油效果明显。该混合动力汽车设计方案采用3个电动机,对于复杂多变的循环路况,回收制动能量效果很好,发动机工作效率也得到极大改善,这对燃油经济性的提高和改善都非常有利。

(2)排放性能分析
表2所示为混合动力汽车在CYC_UDDS循环工况下的尾气排放情况。本文参考 GB18352. 3-2005《轻型汽车污染物排放限值及测量方法》(中国Ⅳ阶段)进行尾气对比分析。从表中可以看出,尾气排放均低于国家标准规定的排放限值。
本文通过合理设计电动汽车的结构,选择合适的部件匹配,优化电动汽车的控制策略,使其在保证动力性的前提下,最大化的提高了燃油经济性和改善了排放性能。

1刘国卿.汽车行业节约型社会担负责任[J].汽车工业研究,2005.
2于秀敏,曹珊等.混合动力汽车控制策略的研究现状及其发展趋势[J].机械工程学报,2006(11):10-16.
3 Zoelch U,Schrode D.Optim ization Method for Rating the Componentsofa Hybrid Vehicle[C]. The 14th InternationalElectric Vehicle Symposium (EVS 14),O rlando,Florida,USA,1997.
4王婷.混合动力电动汽车控制策略的优化研究[D].北京交通大学,2009.
5余志生.汽车理论[M].北京:机械工业出版社,2006.
