舰船电场信号测量系统的硬件设计
2012-03-20蔡旭东方石张仪
蔡旭东 方石 张仪
(1. 海军91388部队,广东 湛江 524022;2. 海装驻710所军事代表室,湖北宜昌 443003)
0 引言
舰船在海水中因受腐蚀、漏电等因素影响,均会产生电场信号,且信号微弱,衰减的较为迅速。舰船电场信号包含了从直流到上千赫兹的极其丰富的频率成分,其峰值通常能达到mV/m的量级,按照频率可分为准静电场、轴频电场、工频及其倍频等电场信号[1]。
而在海上试验中,因人员安全、风浪等不利因素的影响,采用 PC机测量信号比较危险,且设备过大,很难采集到复杂海况下的电场数据,同时也不利于携带。因此设计研制一套方便、可靠、功耗较低的测量系统,能够在较为复杂的海况下,将其布放到测量海域,自动测量和存储环境及舰船电场信号数据,具有很好的实际运用价值。
1 电场测量系统硬件方案[2]
舰船电场测量系统主要由测量电极、放大电路、24位A/D转换器、信号控制微处理器、Flash存储器及电源等其他辅助电路组成。系统硬件组成框图如图1所示。电极接收舰船以及环境干扰信号,经放大进行A/D转换,最后由单片机采用相应的程序对信号进行处理并存储。
1.1 电源电路
系统正常运行需要稳定的电源,采用ADP3330与ADR391芯片为系统提供3 V、2.5 V电压。如图2,通用电池模块为6 V,经过ADP3330芯片产生3 V电压,为放大芯片、AD转换芯片、单片机、存储器件供给工作电压;ADR391芯片产生2.5 V电压,为AD转换芯片、单片机供给基准电压。
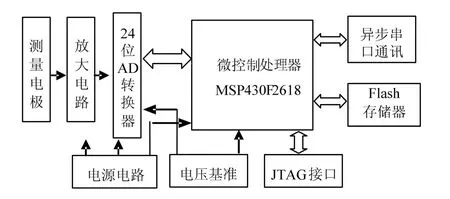
图1 系统原理框图
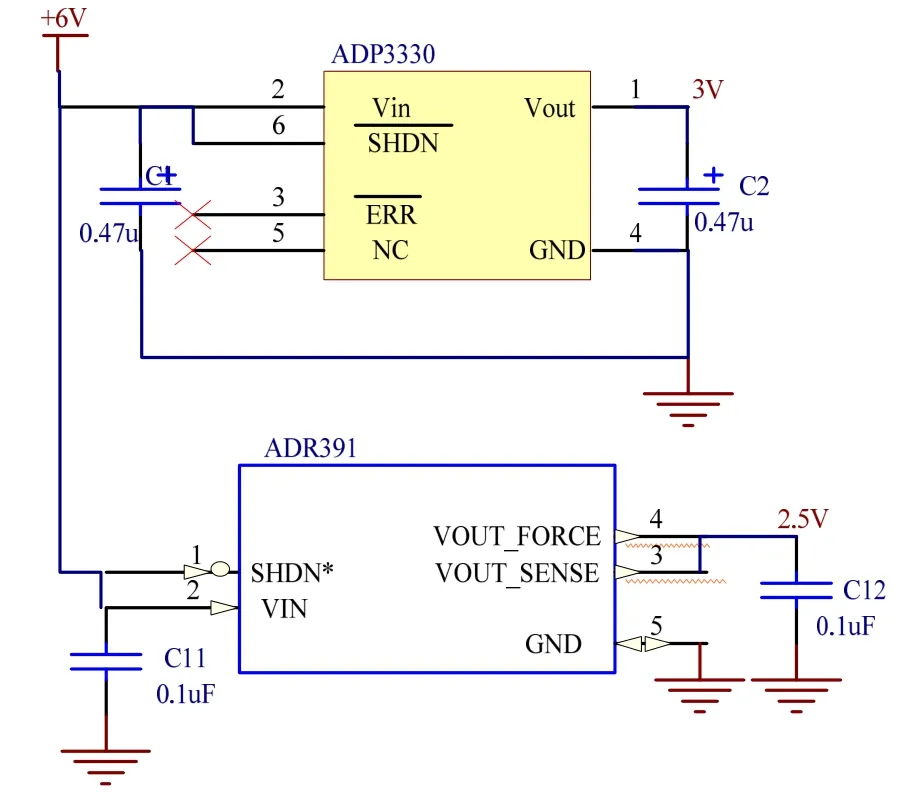
图2 电源电路图
1.2 电极传感器[1,3]
在近场,舰船电场值能达到每米数毫伏的量级,因此测量电极传感器需要具有噪声较低、稳定性能好、灵敏度较高等特性。采用无毒性的Ag-AgCI电极能够满足实验测量需求。且有关研究表明,将Ag-AgCI某一比例配方以粉末冶金工艺制成的电极在海水中具有好的电化学性能,且海水导电的物质载体是氯离子,Ag-AgCI与海水接触后,在固相与液相的接触面上,参与导电的主要载体是同一化学成分,使得电化学噪声较低。


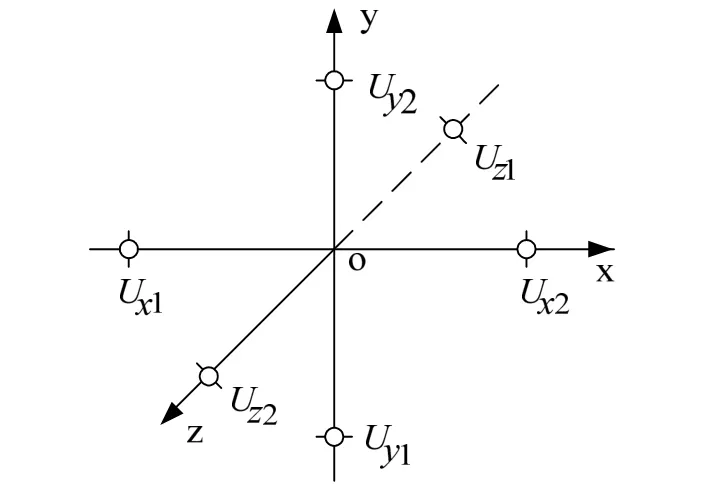
图3 电极直角坐标图
1.3 信号的放大与AD转换
信号分辨率表示输出数字量变化一个相邻数码,所需要输入的模拟电压的变化量[4],即分辨率定义为式(2)

(FSR:Full Scale Range,n为ADC的位数。)
对于数十吨的小舰艇,在近场其准静态场能达到数百微伏的量级,其轴频电场也可达到数十到几百微伏,因此选择分辨率为几微伏就可以满足要求。选择Σ-ΔA/D型3通道24位低功耗数模转换器AD7799,2.75-5.25 V单电源工作,典型工作电流380 μA,电压噪声有效值最低仅27 nV。AD7799有效分辨率23位,峰-峰分辨率20.5位(gain=1, 转换率为4.17 Hz)。由式(2)可以计算出分辨率为:

即最小能够分辨出2.86 V的电场值。根据舰船所产生静电场与轴频电场的量级,为留有余量,可以假设地选择所测量的最大电场值为500 mV(在近场,当基线Δl足够长 到几十米的情况下,可以达到),这样为使其不超过3 V而饱和,系统能分辨出信号进行数字转换,信号的放大倍数选择5倍较为合适。放大芯片选用功耗较低、高精度的运算放大器INA118,其噪声电压密度为11nV/(10 Hz),共模抑制比为114 dB,较宽的供电电压范围±1.35 V到±18 V。
1.4 微控制处理器单元[5]
基于系统的供电电源需要进行低功耗设计的考虑,微控制处理器选用TI公司的MSP430F2618型单片机。这是一款专门为低功耗系统的设计而研制的新型24位单片机,具有LPM0~LPM4五种低功耗模式,其供电电压可以在1.8~3.6 V范围内变化;供电电压为3 V时,活动模式下耗电515 μA/MIPS(MIPS:每秒百万条指令数),LPM3模式下的工作电流仅为3 μA,I/O输入端口的漏电流最大仅50 nA;可以外接32.768 kHz和12 M的晶振,增加了功耗和速度选择的灵活性;系统从低功耗模式到活动模式只需1 μs;内置了定时器、看门狗、比较器、12位D/A、Flash存储器、串口通信模块、硬件乘法器等多种外围设备,大大简化了硬件电路设计。
MSP430F2618与AD7799的接口电路见图4。Signal-X1至Signal-Z2为电场3路信号,单片机P3.0至P3.2与AD控制引脚相连,AD采用4线控制方式。
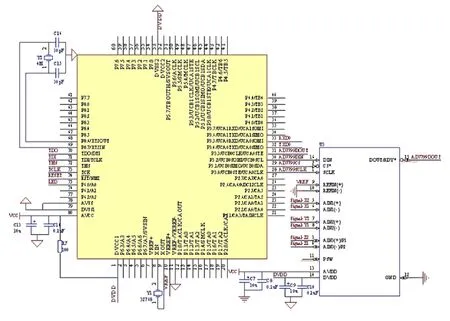
图4 单片机与模数转换器电路图
2 系统工作流程设计[6,7]
测量系统主要完成的是对电场信号进行较为及时、准确地的采集与处理。在单片机上实现信号处理,需要综合考虑运算速度、内存空间、系统功耗、抗干扰等因素,同时要求是一种容易移植、可复用、能够适应不同硬件平台的系统,这样才能更好地满足测量系统的升级、改造等需求。本系统考虑了上述要求,进行了模块化设计,具有较好的易移植、可复用等优点。下面就系统工作流程做简要介绍,如图5所示。
(1)系统初始化:工作之前需要进行初始化,完成单片机的 I/O、状态寄存器、时钟寄存器等设置。
(2)中断服务:系统初始化完成后,进入中断模式。中断程序尽可能编写的较短,在中断中完成采集、存储功能,这样安排也能够从一定程度上降低功耗。
(3)数据采集存储模式:采集数据先放到MSP430存储器中暂存,当达到一定字节在将其按页写入 Flash中,这样做能在一定程度上提高效率,同时还能较好的降低功耗。
3 测量实验及数据分析[8]
系统采用干电池供电,电压为6 V,测量数据为舟山某海域电场值,海面微波无浪,海底为泥沙底。图6是在舟山某海域实际测量的DC~0.5 Hz频段内海洋环境电场数据时域图。可以看出海洋环境准静态电场的峰-峰值基本在 1 mV/m以内,有的甚至小于0.5 mV/m。总体上来看,信号相对平滑稳定,没有较强烈的曲线起伏。
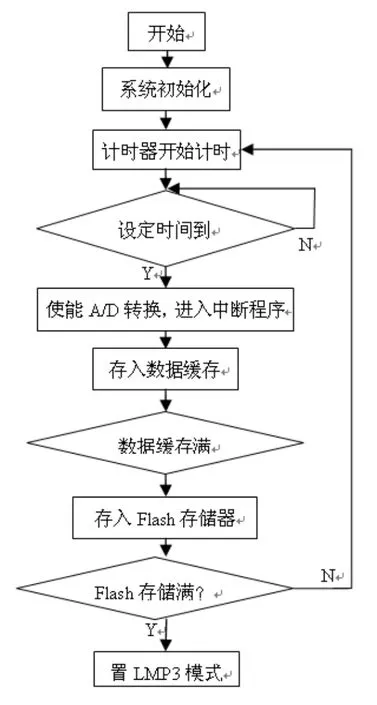
图5 系统软件流程图
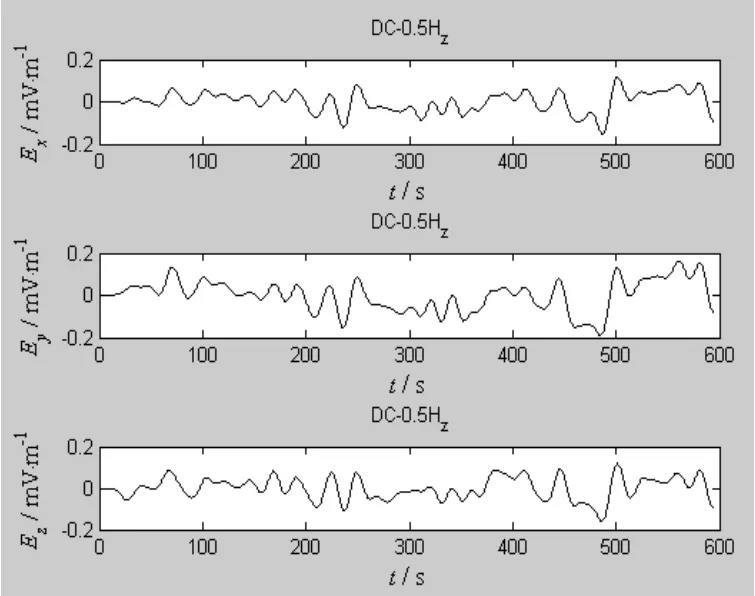
图6 DC~0.5Hz频段内舟山某海域海洋环境电场信号图
图7为舟山某海域实测某型船的准静电场信号图。可明显地发现:没有舰船时,所测得的电场信号是一个较为平稳的过程,没有较大地起伏,信号幅值变化不大;当舰船出现时,x、y、z方向上电场的幅值均会有较大变化(峰-峰值能达到上千微伏每米),持续时间大约10~20 s。
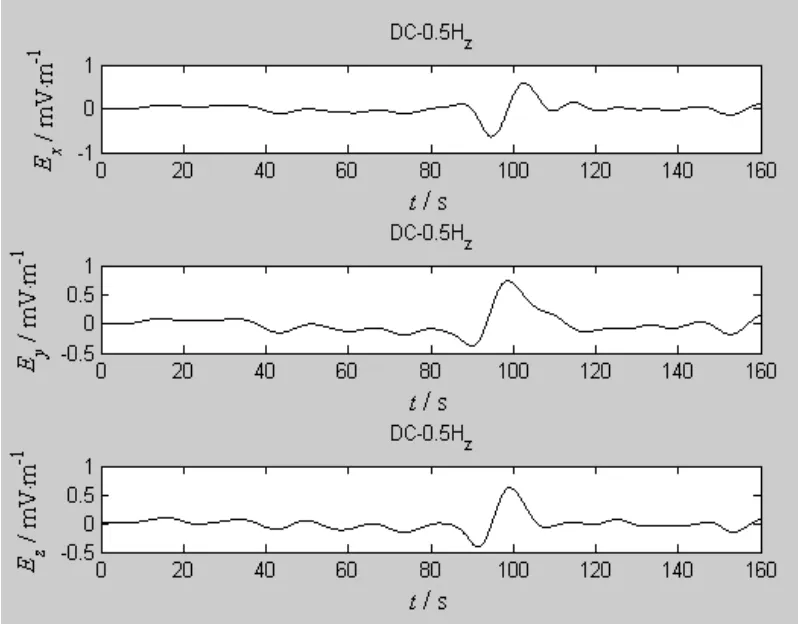
图7 舟山某海域某型船静电场信号图
4 结束语
本文根据电场测量系统功能的要求,提出了基于MSP430型单片机的电场测量系统设计的技术解决方法和实现,该系统能较好地完成低频率电场信号的采集工作,具有很好的便携性等特点。
[1] 林春生, 龚沈光. 船物理场[M]. 北京: 兵器工业出版社, 2007: 233~246.
[2] 孙长国, 彭永红, 龚沈光, 林春生. 舰船地震波数据采集系统[J]. 探测与控制学报, 2007, 29(8): 28~30.
[3] 王军, 何玉堂. 基于 C8051F的船舶水下电场测量仪研制[J]. 中国修船, 2006, 19(8): 8~9.
[4] 周浩敏. 测试信号处理技术[M]. 北京: 北京航空航天大学出版社, 2004: 14-20.
[5] Texas instruments. MSP430x261x mixed signal microcontroller[DB/OL].http://www.ti.com.2007-11-21.
[6] 张晨等. MSP430系列单片机实用C语言程序设计[M].北京: 人民邮电出版社, 2005, 101~122
[7] 蔡旭东. 水雷电场引信技术研究[D]. 武汉: 海军工程大学. 2009.
[8] 胡广书. 数字信号处理理论、算法与实现[M]. 北京:清华大学出版社, 2003, 460-520.
