跳频发射机自动电平控制的实现方法
2012-03-18刘继林
刘继林
(中国西南电子技术研究所, 成都610036)
1 引 言
最近几年,跳频通信技术取得了很大的发展,与此同时,它对发射信道自动电平控制(ALC)的要求也随之提高。在跳频通信中,对ALC 的主要要求就是响应时间要快(一般要求到微秒级),若响应时间过长,则会在通信过程中丢失数据帧头的同步信息,接收端将无法同步,导致不能通信;但是,传统ALC 控制过程中难免会有功率过冲,功率过冲过大又会带来ALC 阻尼振荡,使得功率回零而导致功率达到稳定值的时间变长,即ALC 控制稳定的响应时间变长(约1~2 ms),这在跳频通信中是绝对不能接受的。
传统的ALC 控制技术是通过衰减器(PIN 管调制器)来控制功放系统增益的,衰减器在初始状态时使用的控制电压最大因而获得最小衰减,以此来满足功放增益动态范围调整的需要,这样就使得功放在衰减器初始状态下处于最大增益状态,功放一旦获得RF 激励信号,在短时间内将不可避免地出现功率过冲。功率过冲有相当大的危害性,必须予以解决。
本文从ALC 闭环控制技术出发, 分析了传统ALC 的动态建立过程,提出了控制跳频功放增益增长的新方法。这种方法既有效地解决了功率过冲问题,又缩短了ALC 的响应时间。实践证明,该方法是有效、可行的。
2 ALC 的基本工作原理
2.1 基本概念
所谓自动电平控制(ALC),是指当输入电平在较大范围内变化时,输出电平恒定不变或在允许的波动范围内变化,即当输入信号功率很不稳定或者有较大变化时,经过ALC 环路控制后,输出信号的功率值在较宽的频带上都会稳定在一个相对恒定的幅度值上,起到自适应调整系统增益的作用。
2.2 工作原理
传统的ALC 工作原理框图如图1 所示,主要完成输出功率控制和防止功率放大器过激励的保护等功能,加入ALC 电路,从而在功放内部形成一个带有闭环性质的工作流程。从原理框图上看,ALC 电路的实现必须有一个随输出信号强度改变的电压,然后再通过这个电压去控制PIN 衰减器来改变功放链路的增益,以达到控制输出功率的目的。ALC反馈电路由四部分功能电路组成,即定向耦合器、检波放大电路、求和运放电路和PIN 调制器。

图1 ALC 基本工作原理框图Fig.1 Basic functional block diagram of ALC
2.3 S 域数学模型
ALC 电路的设计必须严格遵循闭环控制理论,否则就可能带来闭环工作时产生的振荡和稳定性问题[1]。为了评估和分析ALC 闭环控制的性能,图1的等效数学模型如图2 所示,信号模型用Laplace 变换表示,X(s)代表输入功率电平值, C(s)为ALC 闭环控制器,G(s)为功放的等效传递函数模型,F(S)为反馈函数模型。

图2 S 域数学模型Fig.2 S Domain mathematics model
由S 域数学模型可以推导出功放控制的传递函数H(s)为

闭环控制的设计目标是保证F(s)G(s)C(s)的全部极点都处于复平面的左半平面,以得到闭环的绝对稳定性;同时优化控制器C(s)、F(s)的参数,保证F(s)G(s)C(s)的单位阶跃响应具有暂态响应时间短、无过冲等特性。
3 ALC 的动态建立过程分析
按图2 模型设计的功放系统的ALC 控制电路会存在严重的过冲问题。因为,从功率输出到检测器输出、PIN 管调制器开始起控有一定的时延,即便是功率输出达到饱和状态,检测器、PIN 管调制器也需要一定的响应时间来反应系统的这个状态,这就是传统的ALC 控制技术导致功放过冲问题的重要原因。
现在从时域上分析ALC 的动态建立过程。传统ALC 控制电路主要组成电路如图3 所示。
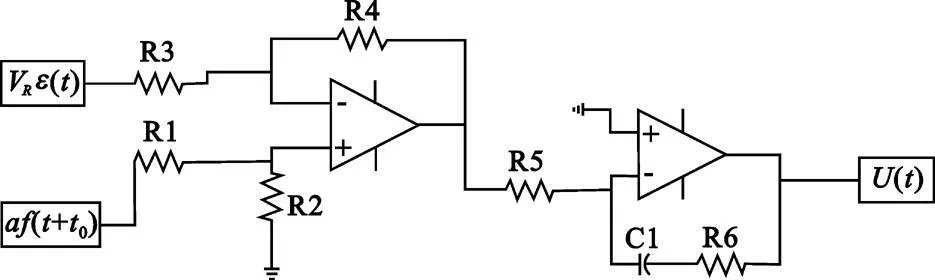
图3 传统ALC 控制电路Fig.3 Traditional ALC circuit
如图3,为了简化分析,假定电阻阻值R1=R 2=R3=R4,可推导出U(t)的表达式为

其中,ε(t)为阶跃函数,用来模拟收发转换的电压函数关系,t0为环路开始控制的时间。
令

根据式(2)可以讨论ALC 的动态建立过程。通常定义ALC 的响应时间为功放输出功率达到稳定值所需的时间。
(1)当t=t0-时,B =0,U(t)最大(接近运放的正电源电压),输出功率最大(饱和功率),表现为功率过冲现象。
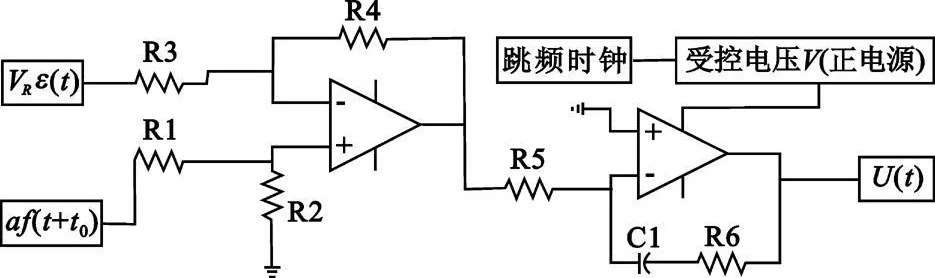
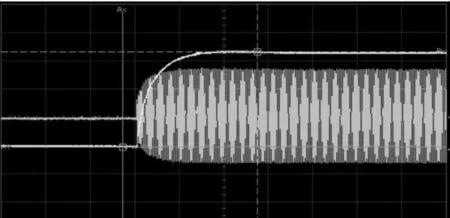
(2)当t >t 0时,为起控过程,反馈控制电压增加,假设达到设定的稳定功率值时的反馈控制电压为C。若B ≤C,功率达到稳定的时间t =t1,即ALC 响应时间t=t1;若B (3)当t =t0+时,虽然过程2 C ≥A, 暂时把U(t)拉为负值,使得输出功率为零,但是A 是始终存在的,再次使得U(t)为正值,但已摆不到最大值,过冲功率也不为饱和功率,此时B 也不为第一次过冲时的最大值,若B 继续比A 大,将会持续阻尼振荡的过程,直至B 小于A 后方可进入到功率稳态的过程,此时功率达到稳态功率的时间为t3,即ALC响应时间为t3。 从上述ALC 的动态建立过程分析,显然t 1 从上述的ALC 的动态过程分析来看,要满足跳频通信对ALC 响应时间的特别要求,就必须解决跳频功放的功率过冲和回零问题[2]。从工程实践过程中,笔者总结出一种利用跳频时钟禁发的方法,有效地解决了传统ALC 控制电路的弊端。 禁发法的实现原理就是利用跳频时钟产生辅助电路,使式(2)中的电压U(t)经过处理后,由负值往正值方向摆动,功率由无到有,再到稳定。这种方法既解决了功率过冲现象又缩短了ALC 的相应时间。 实践证明,利用跳频时钟的解决方案是可行的,原理电路见图4,就是增加利用跳频时钟的辅助电路来控制运放的加电过程,来实现电压由低向高增长。 图4 禁发法原理电路图Fig.4 Circuit diagram for transmission prohibition method 测试条件:室温,输出功率15 W。利用禁发法改进后的ALC 响应及功率响应如图5 所示。由图可见,ALC 的控制电压的增长从低到高,实现了功率的增长由无到设定的稳定功率,消除了传统的ALC控制的功率过冲和回零问题,缩短了ALC 的响应时间。此外,ALC 的响应时间小于20 μs。通过上系统测试,电台通信的误码率和掉包率均满足技术要求。 图5 ALC 响应时间测试结果Fig.5 Test result of ALC response time 本文通过对ALC 分析,认识了传统ALC 控制跳频发射信道的弊端,找到了利用跳频时钟作为辅助手段的解决方法,在某工程电台上获得了很好的使用效果。该方法具有辅助电路简单、响应时间快和无功率过冲等优点,是一种理想的跳频发射信道环路控制方案,ALC 的响应时间可以达到微秒级。 [1] 刘明俊, 于明祁, 杨泉林.自动控制原理[M] .长沙:国防科技大学出版社,2000. LIU Ming-jun,YU Ming-qi,YANG Quan-lin.Automatic Control Principle[M] .Changsha:National Defense University of Science and Technology Press,2000.(in Chinese) [2] 梅文华, 王淑波.跳频通信[ M] .北京:国防工业出版社,2005. MEI Wen-hua,WANG Shu-bo.FH Communication[M] .Beijing:National Defense Industry Press,2005.(in Chinese)4 跳频发射信道ALC 的实现方法
5 禁发法测试结果
6 结束语
