智能车两类路径识别系统比较研究
2012-03-17张迪洲李增彦
张迪洲,李增彦
(军械工程学院 光学与电子工程系,河北 石家庄 050003)
智能车的应用前景十分广泛,智能水平也越来越高,给我们的工作和生活都带来了极大的方便。结合传感器技术和自动驾驶技术,智能车可以出色的完成人们下达的任务,比如汽车夜间安全辅助驾驶、无人值守的巡逻监视、物料的运输、消防灭火等。这些技术的实现,都离不开智能车的路径识别系统,使用更精确、更稳定的路径识别系统可以为智能车提供更丰富的环境信息,为智能车实现更多的功能提供必需的条件。
在“飞思卡尔”杯全国大学生智能汽车竞赛中,常见的路径识别系统分为基于光电传感器和基于摄像头传感器两种方案。路径识别系统作为智能车的“眼睛”,是整个控制算法的基础,具有举足轻重的地位[1]。其设计得好坏与否,直接关系到智能车的整体性能。研究中首先完善了基于光电传感器和基于摄像头传感器两类路径识别系统,然后对这两种方案进行了比较,对每种方案的优缺点进行了总结。在比较过程中,也促进了两种方案的交流,进而互相启发,取长补短,使各自路径识别系统更加完善。完善后的光电传感器路径识别系统采用了激光传感器,如图2所示。
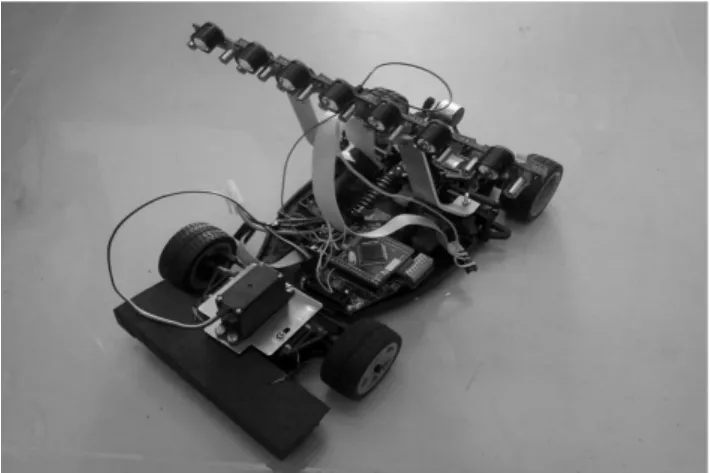
图1 光电传感器智能车Fig.1 Laser sensor-based smart car
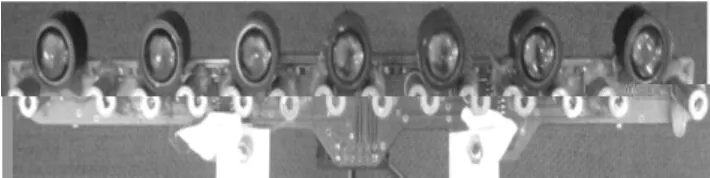
图2 激光传感器路径采集模块Fig.2 Laser sensor-based path identificationmodule
1 基于光电传感器的路径识别系统
光电传感器路径识别系统通常采用红外传感器或者激光传感器,统称光电传感器[2],制作好的光电传感器智能车如图1所示。
针对激光传感器功率高,准直性好、前瞻距离大的特点,
采用收发分离的采集策略,使每一个接收管接收对应两个发射管发出的激光,并采用控制电路对14个发射管进行奇偶分组发光的策略。减轻了传感器电路板的重量,防止了相邻发射管之间的干扰,缩短了路径采样的周期,节省了器件的使用和单片机的资源。在软件算法上将连续若干次一维检测结果记录下来,组合成一幅二维“图像”,实现由一维信息向二维信息的转换,从横向和纵向两个方向共同分析黑线中心位置的特点和相互关系,进而识别赛道模式,获取黑线的变化趋势等赛道信息[3]。
2 基于摄像头传感器的路径识别系统
摄像头传感器路径识别系统通常采用模拟摄像头或者数字摄像头,制作好的摄像头传感器智能车如图3所示。

图3 摄像头传感器智能车Fig.3 Camera sensor-based smart car
由于数字摄像头不需要外部的复合视频信号分离电路和AD模块,输出的数字图像信号直接传送给了单片机[4],大大简化了路径识别系统的硬件电路,因此完善后的摄像头路径识别系统采用数字摄像头,如图4所示。摄像头应放在智能车转心附近,降低智能车转动惯量,使智能车转向更加容易。

图4 数字摄像头路径采集模块Fig.4 Digital camera sensor-based path identificationmodule
由于路径识别系统对实时性的要求很高,所以必须采用简单高效的图像识别算法。此设计采用的是直接边缘检测和跟踪边缘检测相结合的方法。
前10行采用直接边缘检测。在摄像头视野里,前10行背景干扰相对来说不明显,采用直接边缘检测可以提取每行中的所有黑线,有利于识别十字线赛道和起跑线。
中间20行采用跟踪边缘检测。根据前两行黑线的延伸方向和宽度估算当前行黑线的位置和宽度。如果此行存在多段黑线,则取最接近的那段。
最后20行同样采用跟踪边缘检测。因为摄像头采集到的图像远处小近处大,越远的黑线宽度越窄,所以对最后二十行采用跟踪边缘检测的时候搜索的范围更窄。以提高算法的执行效率,节省时间。
3 两类路径识别系统的比较
本文分别在硬件设计和软件算法上分别对完善后的两类路径识别系统进行了比较,分析了各自的优缺点,并在两种方案中取长补短,使各自路径识别系统更加完善。
在计算装机容量时,已知的相关参数有:坝址年平均径流量Wp(亿m3);上游合计有效库容Vs(亿m3);本级有效库容Vb(亿m3);总有效库容Vz(亿m3);多年平均发电量Ep(亿kW·h);可靠电能Ekk(亿kW·h);可靠出力Nk(MW)。
3.1 两类路径识别系统的硬件比较
1)硬件电路设计
基于激光传感器的路径识别系统在硬件电路的设计上主要为单片机决策系统、发射接收电路和选通控制电路。在本次制作的智能车中,采用一个接收管对应两个发射管的方式,大大节省了单片机的端口资源[5]。但需要自主制作主控板和传感器电路板,其中发射接收还需要调整测试每一个发射管的功率和前瞻距离。
基于数字摄像头的路径识别系统在硬件电路的设计上只需要自主制作主控板。由于数字摄像头片内集成了复合视频信号分离电路和AD模块,所以主控板的制作简化了这两部分。
经过比较,基于数字摄像头的路径识别系统在硬件电路的制作上更为简单,从而节省了制作智能车的时间。
2)传感器的布局和安装
基于激光传感器的路径识别系统在传感器的布局和安装上方式比较灵活,经过巧妙地设计,可以增加采集的精度,获取更多的赛道信息。如“W”型布局、多排布局和随动布局,但随着布局方式的升级,其路径采集的算法也随之更加复杂。在安装方式上,为了获得更大的前瞻距离,传感器电路板多安装在车体的前侧,但由于激光管的数量多、重量大,所以传感器电路板的固定需要综合考虑车体重心,转动惯量和前瞻距离的关系。
基于数字摄像头的路径识别系统在传感器的布局和安装方式上比较单一。由于摄像头前瞻距离比较大,其安装位置一般位于车体的转心,采用竖直支撑杆。可以调节其高低自由度、方位自由度和俯仰自由度。由于摄像头的重量比较轻,所以在传感器的安装方式上几乎不需要过多地考虑车体的重心和转动惯量[6]。
经过比较,激光传感器的布局和安装方式比较灵活,多种多样,有较大的设计和创新空间。但在通常的设计中,激光传感器电路板的重量要远大于摄像头的重量,布局和安装都要更多的考虑智能车的重心、转动惯量等其他因素。而且增加了智能车的整体重量,影响了智能车的行驶速度。另外在成本上,虽然单个激光管的成本没有摄像头高,但因为所需激光管数量比较多,且需要自己制作传感器电路板,所以在总成本上要远高于摄像头。
3.2 两类路径识别系统的软件比较
1)图像采集
图像采集是传感器获得赛道信息的初始信息,其主要性能参数是采样速度、采样精度和采样范围。
基于激光传感器的路径识别系统[7]由于采用奇偶分组发光策略,检测周期短,更新速度快,软件处理速度快,实时性好。基于数字摄像头的路径识别系统采集一场图像周期较长,实时性稍差。但摄像头获得的图像信息丰富,连续性好,精度高,其每一场图像可以达到数十行,且每行扫描的点数可以达到数十个,这是激光传感器远远无法完成的。
由于受到器件本身的性能以及安装位置的影响,激光传感器的前瞻距离一般都在四五十厘米左右,而摄像头的前瞻却可以达到一米以上。
2)滤波算法
由于摄像头采集到的路径信息精度高,范围大,所以在数字滤波算法方面具体更大的可执行空间。虽然在设计中两类路径识别系统都用到了基于赛道连续性的中值滤波。但激光传感器主要是对单行信息进行了滤波处理,另外由于激光传感器采集到的行数较少,每一行采集到的点数也较少,所以滤波后的图像连续性较差,不能精确的反映出赛道的信息。而摄像头可以在采集到的一场中对整场图像进行滤波,并且采集到的行数和每行的点数都比较多,滤波后的图像更能反映出赛道的真实特征,从而为下一步赛道识别提供更加精准的信息。
3)赛道识别
基于激光传感器的路径识别系统在赛道识别上,吸收了摄像头路径识别系统中整场处理的思想。根据连续多行中黑色引导线的位置和变化趋势来判断赛道特征,识别赛道模式。但由于采样精度和前瞻距离的影响,实际测试中并不能很好的识别S弯道。尤其在坡道的识别上摄像头的优势更加明显。

表1 两类路径识别系统的优缺点比较Tab.1 Advantages and disadvantages of the two types of path identification system
由表1可知,基于激光传感器的路径识别系统具有较高的可靠性与稳定性,检测周期短,实时性好,且单片机易于处理。经过完善,在一定程度上解决了占用较多单片机端口的问题。但硬件电路的设计较为复杂,需要自主制作的传感器电路板。而且光电传感器本身存在着检测距离近,前瞻性差的问题,获得的赛道信息连续性差,不能对远方的路径进行识别,降低了对环境的适应能力,影响了智能车速度的提升。本设计对激光传感器路径识别系统的识别算法上,吸收了摄像头传感器“场”的思想,把一维信息转化为二维信息,在一定程度上增强了对赛道信息识别的能力。
基于数字摄像头的路径识别系统,获得的赛道信息前瞻距离大,连续性好,精度高,能够精确地感知智能车的位置,尽可能早地对前方的赛道信息进行预判定,有利于特殊赛道的识别。并且硬件安装简单,调试方便。不足之处是采样周期长,实时性稍差,并且软件算法比较复杂。如果摄像头传感器可以与光电传感器配合使用,便可以吸收光电传感器在采样速度和实时性方面的优点,提高系统的稳定性和可靠性。
4 结束语
本文对两类路径识别系统分别在硬件设计和软件算法上进行了完善和比较,分析了各自的优缺点。激光传感器路径识别系统具有更高的采样速度和实时性,且软件算法容易实现。数字摄像头路径识别系统具有更高的采样精度和更大的前瞻距离,对特殊赛道具有更强的识别能力。
[1]卓晴,黄开胜,邵贝贝.学做智能车——挑战“飞思卡尔”杯[M].北京:北京航空航天大学出版社,2007.
[2]邵贝贝.微控制器嵌入式应用的在线开发方法 [M].北京:清华大学出版社,2007.
[3]邵贝贝,龚光华.单片机认识与实践[M].北京:北京航空航天大学出版社,2006.
[4]王名发,江智军,郭鹏.基于OV7620摄像头智能车道路信息视频采集及处理研究 [EB/OL]. (2010-04-04).http://www.docin.com/P-49234997.html.
[5]Barrett SF,Pack D J.《嵌入式系统——使用68HC12和HCS12的设计与应用》[M].郑扣根,等译.北京:电子工业出版社,2006.
[6]臧杰,阎岩.汽车构造[M].北京:机械工业出版社,2005.
[7]李国柱.基于CMOS摄像头的智能车路径跟踪系统设计[J].现代电子技术,2011(18):12-14,17.
LIGuo-zhu.Design of tracing system for intelligent vehicle based CMOS camera[J].Modern Electronic Technique,2011(18):12-14,17.