机器人多指手的多目标优化抓取规划
2012-03-13孙志峻
郭 语 孙志峻
(南京航空航天大学机械结构力学及控制国家重点实验室,南京210016)
抓取规划是机器人多指手进行稳定抓取任务的基础,也是灵巧操作的重要前提.一个完整的多指抓取规划包括接触点位置布局、接触模型和多指手位形规划等,涉及到静力平衡、接触约束和运动约束等问题.
当物体接触点布局完成后,首先需要确定合适的接触力,这对多指手稳定抓取非常重要.接触力的解空间可分为相互正交的操作力空间和内力空间,前者起平衡外力作用,后者自成平衡力系,且对接触力具有重要的调整作用,因此如何合理地确定内力是多指手能否稳定抓取物体的重要条件.现有的研究大多通过规划最小或最大内力,实现对抓取力的优化调整[1-4].但是这些研究存在以下问题:①最小内力容易造成抓取力接近摩擦锥约束边界,增大了接触滑移可能性.②最大内力可减少相对滑动的可能性,但当摩擦系数较小时,接触力的微小偏差可能使得内力越大,反而稳定性越差.因此,过大或过小的抓取内力都是不合适的.一些学者在人手两指精度抓取物体实验中发现,手指施加的抓取内力往往比约束物体所需最小内力多出一个安全余量,为保证对物体的稳定抓取,该余量约为最小内力的50%[5],该结论为机器人多指手抓取内力的确定提供了另一种思路.
多指抓取规划还应考虑多指手的自身运动学约束.研究者在确定预抓取位形时一般按运动灵巧性指标或最小关节力矩指标进行规划[6-8],但往往仅考虑某一方面,然而一个好的多指抓取规划需要综合考虑多个抓取性能指标.
基于以上分析,本文借鉴人手抓取经验,提出接触安全裕度的概念并用于内力规划,以获取多指手稳定、安全地抓取物体的接触力.通过将物体相对手掌的位姿参数作为变量,确定了接触力与多指手关节力矩之间的映射关系.综合考虑转角位置度和相对承载能力作为优化指标,最终得到衡量多指手抓取性能的多目标优化模型.利用多目标粒子群优化算法获得了目标函数的非劣解集,从而实现了完整的多指手抓取规划.
1 多指抓取的规划模型
1.1 静力平衡方程
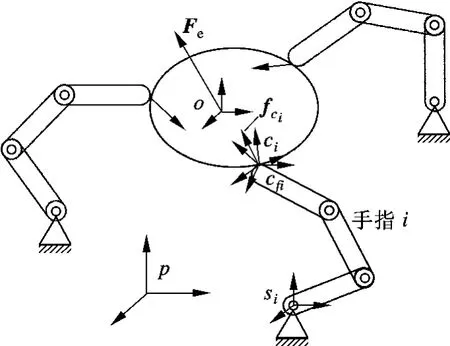
图1 多指抓取物体模型
设有n 个手指抓取一物体,见图1.假设手指i的关节数为mi; θi,τi∈Rmi分别表示手指i 的关节向量和关节力矩向量.并设指尖与物体之间的接触模型为有摩擦点接触.p 为手掌参考坐标系,si为手指i 的基坐标系,o 为与物体固连的坐标系,原点与物体质心重合.在手指i 与物体的接触点处,建立与物体固连的接触坐标系ci,原点与接触点重合,z 轴指向接触点处表面内法矢方向.cfi为手指i的指尖坐标系,若忽略手指指尖轮廓,则cfi的坐标系原点与接触点重合.fci={fcix,fciy,fciz}T∈R3为物体在接触点i 处所受的指尖接触力,其中fcix和fciy为接触力的切向分量,fciz为法向分量.
作用在物体上的任何力系总可以合成为一个作用于某直线的集中力和绕该直线的力矩,这种组合称之为力螺旋,可表示为Fe={fe,τe}T.指尖对物体的作用可以看作是手指施加于接触点的力与物体参考点合力螺旋之间的一种映射[9].若物手系统是静止的或运动速度较慢,则接触力形成的合力螺旋与外力螺旋满足静力平衡方程:

式中,G=[G1,G2,…,Gm]∈R6×3m为抓取矩阵;fc∈R3m为接触力向量.若接触点相对于物体坐标系的位置和姿态由goci=(poci,Roci)∈SE(3)描述,则单接触点的抓取映射矩阵Gi由下式确定:

1.2 摩擦约束条件
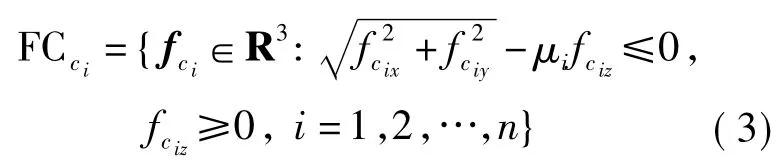
为了保证物体与指尖在接触点处不出现滑动,必须使接触力处于接触点摩擦锥内部,即切向分量小于或等于法向分量fciz与摩擦系数μ 的乘积,同时,接触力的法向分量具有单向性特点,因此满足有摩擦点接触模型的摩擦锥约束条件为
1.3 接触力规划
设接触布局和物体所受外力螺旋已知,由于多指抓取映射矩阵G 一般为非满秩矩阵,则接触力为

式中,G+为G 的M-P 广义逆;fcp=-G+Fe为平衡物体所受外力螺旋的操作力分量;fch=(I-G+G)λ为内力.对于确定的外力螺旋,操作力分量可直接求出,而由于内力具有不确定性,因此如何确定内力对抓取性能具有关键作用.一般规划方法多以能量最小作为优化目标,而某些情况下这种优化得到的接触力正好在摩擦锥边界上,一旦有外扰作用或控制误差,规划的抓取将失效[10].为避免这种情况的出现,发现通过调整摩擦锥约束条件可以保证接触力处于摩擦锥内部.定义ρi∈[0,1]为i 接触点处的接触安全裕度,其意义可由下式表示:

式中,ρi表示接触力偏离约束边界的相对程度,当ρi=0,表明接触点i 处的接触力正处于摩擦锥的边界上,此时接触点处于滑移的临界状态,稍有外扰,接触稳定性即被破坏;当ρi=1,表明接触点i 处没有滑移趋势,此时该接触点最稳定.通过引入接触安全裕度概念,摩擦锥约束条件修正为

则满足式(1)和式(6)的最小内力规划模型可概括为
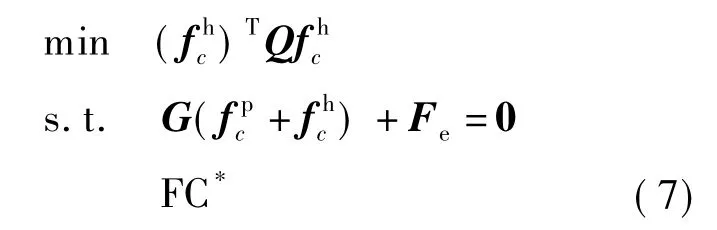
式中,Q 为权重矩阵(一般为对角矩阵),和各手指的指尖抓取能力有关.优化后的内力fch*就是具有接触安全裕度ρ 的最优内力,相应的接触力为

1.4 关节空间性能规划
当被抓取物体的接触点布局及抓取力分配确定后,由于接触点的约束,各手指与物体形成若干运动闭链.当物体在手掌坐标系中的位姿变化时,各手指的抓取位形也相应变化,因而分配到各手指关节上的驱动力矩也将重新分配.因此,可通过物体位姿参数建立接触力到手指关节空间的映射.
设第i 个接触坐标系相对于手指基坐标系的位姿为gsici=(psici,Rsici),fsici为接触力矢量在手指基坐标系中的表示,则有

考虑到刚体变换性质,有

即


式中

设Ji为手指i 的雅可比矩阵.联立式(9)~(12)可得多指手抓取物体时关节空间力矩与接触力的映射关系:
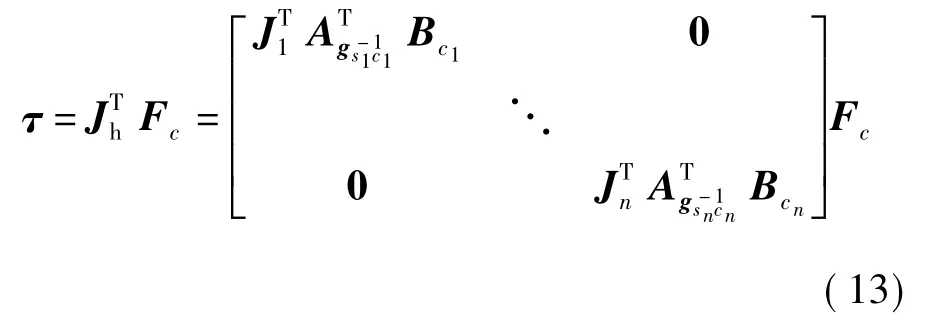
式(12)、(13)描述了多指手关节力矩与物体位姿以及手指位形之间的关系,因此通过对物体位姿的规划可以优化多指手关节空间中的抓取性能.
对于机器人多指手精度抓取而言,首先希望其用最小的关节力矩实现稳定抓取物体,即具有最大的输出潜力,以实现多指手抓取性能的最大化.其次,指尖抓取的突出优点是可对物体进行灵巧操作,因此操作灵活性也是衡量其抓取性能的一个重要指标.本文主要考虑多指预抓取阶段,因此将多指手的转角位置度和相对承载能力作为优化性能指标,分别建立其目标函数[7-8],即
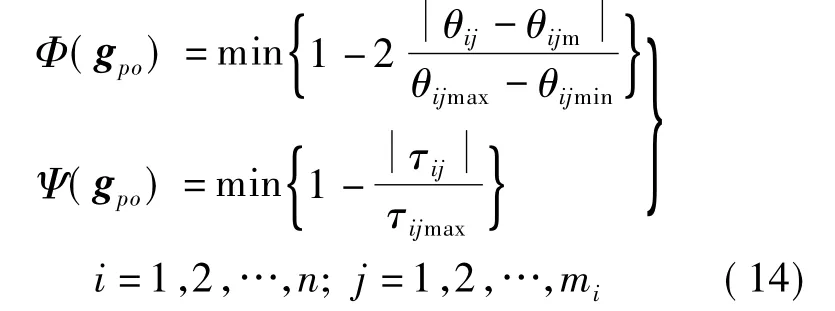
式中,θijmax和θijmin分别为手指i 的关节j 的最大和最小转角;θijm=(θijmin+θijmax)/2 为手指i 的关节j的转动中间位置;τij为手指i 的关节j 的输出力矩,τijmax为其最大输出力矩.
2 多目标粒子群优化算法
2.1 多目标优化模型
式(14)表示的多指抓取规划模型由于性能指标的多样性,其本质上是一个多目标优化问题.各目标之间通常相互制约,所以多目标优化命题一般不存在唯一的全局最优解.实际上多目标优化命题往往是如何寻求非劣解集及其在非劣解前沿的分布过程,最后决策者在其中选取一个最满意解.则多指抓取的多目标优化问题模型可归纳为

式中,x = { xpo,ypo,zpo,α,β,γ}T为决策矢量;Lh(·)为多指手的正运动学; xmin,xmax表示物体位姿参数的变化范围.
2.2 多目标粒子群优化算法
目前有多种不同算法用于求解多目标优化问题,基于种群搜索的粒子群优化算法由于其易实现、计算高效、不要求目标函数可微,以及基于种群的特点,使其非常适用于多目标优化领域.许多研究者成功地将基于粒子群的多目标优化算法应用于各种领域[11-13].本文采用基于拥挤因子和扰动算子的多目标粒子群优化算法[14]来求解多指抓取规划问题,该算法被证明相对其他多目标优化算法,能够更好地逼近非劣解前沿.算法流程如下:
①初始化粒子群.确定种群规模N,随机产生每个粒子的位置xi,初始化粒子速度vi=0,i =1,2,…,N.
②计算初始种群适应度,筛选粒子群中的非劣解放入领导集,将领导集放入ε-支配文档.
③计算领导集中的每个粒子的拥挤因子.
④初始化迭代代数g =0,确定最大迭代次数gmax.
⑤进入迭代循环.
a)从领导集中随机选取一个粒子作为当前全局最优gbest,更新每个粒子的速度,即

式中,w 为惯性权重,取(0.1,0.5)之间的随机数;c1,c2为学习因子,取(1.5,2.0)之间的随机数;r1,r2为(0.0,1.0)之间的随机数.
b)更新每个粒子的位置

c)更新pibest.
d)计算领导集中粒子的拥挤因子,并按降序排列,更新领导集,更新ε-支配文档,g=g+1.
e)若g≤gmax,返回⑤,否则输出ε-支配文档.
⑥结束程序.
3 算例分析
以图2所示的三指手抓取圆球模型为例,每个手指结构相同,各有3 个自由度,其运动学参数如表1所示,手指在手掌中的布局如图3所示,手掌坐标系原点位于三指基座围成的三角形中心处,物体坐标系原点位于球心,圆球半径r =30 mm,指尖与物体之间的摩擦系数μ=0.3.为方便分析,假设物体所受外力螺旋为纯力矢量,且大小不变,为1 N,方向如图2所示,则外力螺旋可表示为

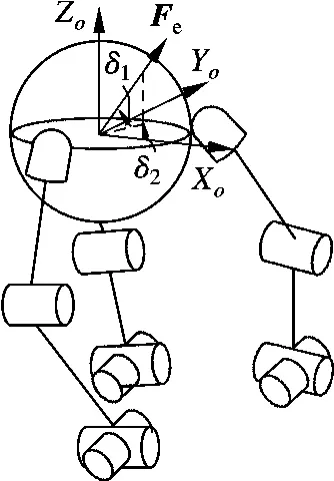
图2 三指手抓取圆球

图3 手指在手掌中的布局

表1 手指D-H 参数
3.1 接触力规划结果与分析
三指指尖接触点在圆球大圆上均匀分布,则抓取矩阵G 为
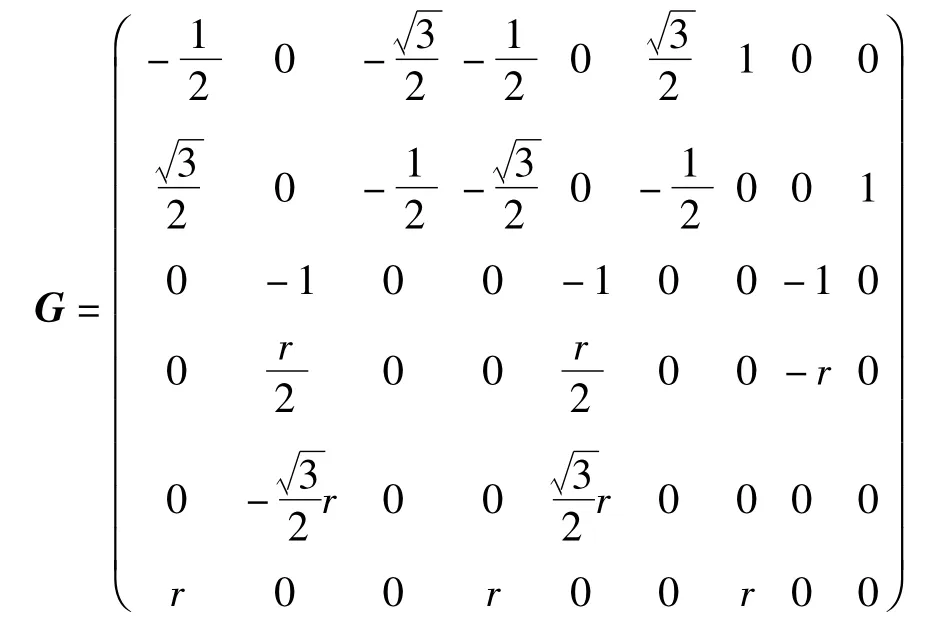
取接触安全裕度ρ1=ρ2=ρ3=0.3,式(7)中的权重矩阵为单位阵.以外力螺旋的方向角δ1,δ2为变量,在Matlab 中编制由式(7)和(8)表示的优化模型,输出为规划后的抓取接触力随外力螺旋方向变化的分布,如图4所示.由于抓取的对称性,仅给出δ2从-90°到90°的变化结果.可看出,若δ2固定,当δ1=0 时,3 个接触力的模都最小,因此在进行具体抓取时,应尽量选择使外力螺旋方向在3 个接触点决定的接触面上.

图4 ρi =0.3 时各指尖接触力大小分布
图5给出了各指尖的接触安全裕度随外力螺旋方向变化的情况.可看出,3 个接触点的接触安全裕度都大于等于0.3,接触力处于摩擦锥内部.进一步计算可知接触力与摩擦锥边界的夹角至少为4.84°,说明内力的规划可以允许一定扰动的发生.若不设置接触安全裕度,则在一些情况下规划后的接触力将处于摩擦锥边界,一旦有外部扰动或控制误差,抓取将变得不稳定甚至失效.
3.2 关节空间内的多目标优化
设物体所受外力螺旋Fe为纯力矢量,方向为δ1=30°,δ2=60°,大小为5 N.利用内力规划模型获得的各接触力如表2所示.

图5 ρi =0.3 时各指尖接触安全裕度分布

表2 接触力规划结果 N
假定手指各关节驱动能力相同,且τmax=0.8 N·m.优化变量为物体位姿参数,优化目标是使多指手的相对承载能力和转角位置度最大.多目标粒子群优化算法的参数设置为:粒子群规模N=100,最大迭代次数gmax=200,ε=0.05.图6为最终得到的非劣解前沿曲线.可看出利用该多目标粒子群优化算法可有效地求得非劣解前沿,且分布较均匀.
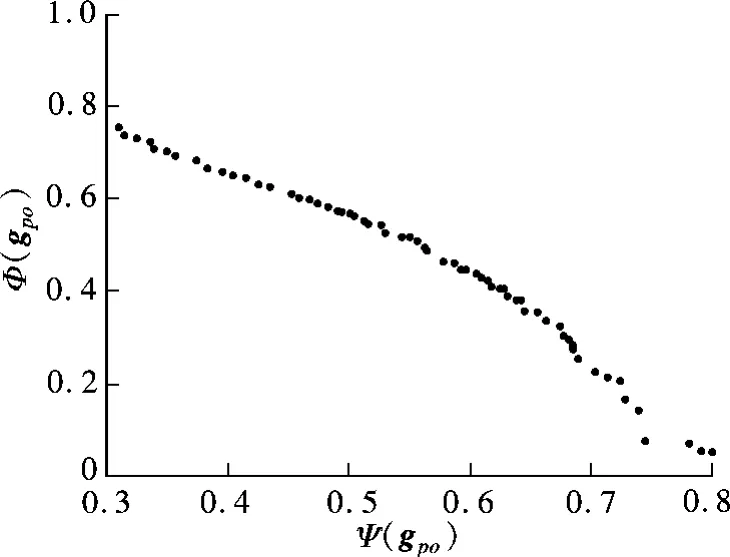
图6 非劣解前沿
此外,相对承载能力与转角位置度互相制约,因此在实际应用时,只能根据抓取任务的要求选取不同的性能指标.通过将非劣解集保存为专家知识库,可方便地获取不同性能指标组合下的最优抓取规划.表3为若干优化结果,可看出,相比初始位姿,优化后的相对承载能力和转角位置度都有明显改善.

表3 位姿优化结果对比
4 结语
本文借鉴人手抓取经验,提出了接触安全裕度的概念,并建立了非线性优化模型以求取最优安全内力以及接触力.以物体位姿参数作为变量,确定了接触力与多指手关节力矩的关系,并将多指手的抓取规划问题归结为由多指手关节空间内的相对承载能力和转角位置度为优化目标的多目标优化问题.以三指手抓取系统为例进行了数值求解,探讨了外力螺旋的方向变化对接触力和接触安全裕度的影响.首次尝试利用多目标粒子群优化算法,对多指抓取进行规划,所求得的非劣解前沿可作为预抓取位形规划依据.
本文所提出的规划方法不受被抓物体轮廓和多指手结构的限制,对于其他多指抓取系统的规划具有一定的参考意义.
References)
[1]Kerr J,Roth B.Analysis of multifingered hands[J].The International Journal of Robotics Research,1986,4(3):3-17.
[2]李家炜,胡海鹰,王滨,等.多指抓取内力的简单算法[J].自然科学进展,2005,15(6):733-738.
Li Jiawei,Hu Haiying,Wang Bin,et al.A simple algorithm for internal force of multi-fingered robot hands grasping [J].Progress in Natural Science,2005,15(6):733-738.(in Chinese)
[3]刘庆运,岑豫皖,谢能刚,等.基于抓取稳定性的手指接触力规划算法[J].机械工程学报,2010,46(7): 57-62.
Liu Qingyun,Cen Yuwan,Xie Nenggang,et al.Optimization algorithm for contact forces based on grasping stability [J].Journal of Mechanical Engineering,2010,46(7): 57-62.(in Chinese)
[4]王滨,李家炜,刘宏.机器人多指手的优化抓取力计算[J].吉林大学学报:工学版,2008,38(1):178-182.
Wang Bin,Li Jiawei,Liu Hong.Optimal grasping force computation for multi-fingered robot hand [J].Journal of Jilin University: Engineering and Technology Edition,2008,38(1):178-182.(in Chinese)
[5]Johansson R S,Riso R,Hager C,et al.Somatosensory control of precision grip during unpredictable pulling loads-Ⅰ.changes in load force amplitude[J].Experimental Brain Research,1992,89(1): 181-191.
[6]Bicchi A.On the closure properties of robotic grasping[J].The International Journal of Robotics Research,1995,14(4): 319-334.
[7]李国顺,张永德.基于抓取接近方向的机器人多指手的优化抓取[J].电机与控制学报,2003,7(1):62-66.
Li Guoshun,Zhang Yongde.Optimal grasp of multifingered robot hands based on approach direction[J].Electric Machines and Control,2003,7(1):62-66.(in Chinese)
[8]李继婷.机器人灵巧手的抓持规划[D].北京: 北京航空航天大学,2004.
[9]理查德·摩雷,李泽湘,夏恩卡·萨恩特里.机器人操作的数学导论[M].徐卫良,等译.北京: 机械工业出版社,1998.
[10]王国庆,张启先,李大寨,等.基于抓持稳定度的多指灵巧手抓持控制[J].航空学报,1997,18(3):294-298.
Wang Guoqing,Zhang Qixian,Li Dazhai,et al.Grasping control of the dexterous hand based on the degree of stability of grasping[J].Acta Aeronautica et Astronautica Sinica,1997,18(3): 294-298.(in Chinese)
[11]Masehian E,Sedighizadeh D.Multi-objective robot motion planning using a particle swarm optimization model[J].Journal of Zhejiang University—Science C: Computers &Electronics,2010,11(8):607-619.
[12]Marinaki M,Marinakis Y,Stavroulakis G E.Fuzzy control optimized by a multi-objective particle swarm optimization algorithm for vibration suppression of smart structures[J].Structural and Multidisciplinary Optimization,2011,43(1): 29-42.
[13]孙光永,李光耀,陈涛,等.多目标粒子群优化算法在薄板冲压成形中的应用[J].机械工程学报,2009,45(5): 153-159.
Sun Guangyong,Li Guangyao,Chen Tao,et al.Application of multi-objective particle swarm optimization in sheet metal forming[J].Journal of Mechanical Engineering,2009,45(5):153-159.(in Chinese)
[14]Reyes-Sierra M,Coello Coello C A.Improving PSObased multi-objective optimization using crowding,mutation and ε-dominance [C]//The Third International Conference on Evolutionary Multi-Criterion Optimization.Guanajuato,Mexico,2005: 505-519.
