模糊自适应PID控制在耙吸式挖泥船主动耙头的应用
2012-03-12王培胜胡知斌
王培胜,胡知斌
(上海达华测绘有限公司,上海 200136)
0 引言
随着人们对耙头挖泥机理的深入研究以及世界先进新技术的发展对疏浚技术发展强有力的推动。上世纪末荷兰IHC、德国LMG、比利时JDL等著名国际疏浚船制造商、工程承包商相继推出了新型高效的主动耙头。它是由液压油缸主动调节耙唇,确保在不同深度下耙吸管角度变化时耙头始终紧贴泥面,耙齿深入泥中[1]。但是耙唇的调节完全依靠人工按不同挖深加以手动调整,因而操作人员劳动强度大,水深变化适应性差,经常反应滞后。
为了使现有耙头具有更高的主动性和智能性,使耙吸挖泥船在施工过程中针对不同的挖深和土质具有自动调节耙唇角度,保持耙唇与泥面的紧密贴合,提高施工效率,而不需要再进行人为干预,本文引入模糊自适应PID控制的方法对主动耙头进行自动控制,通过模糊推理对PID参数的自适应整定,使其既具有模糊控制灵活、适应性强的优点,又具有PID控制精度高的特点[2]。
1 主动耙头结构及工作原理
耙头是耙吸挖泥船主要疏浚设备之一,它安装在耙吸管最下端,挖泥作业时耙头紧贴水底泥面,在船的拖曳下松土挖泥,再由泥泵将泥水混合物一起吸人并排入泥舱,最终运至指定抛泥区域,达到清淤、疏浚、工程开挖之目的。
1.1 主动耙头的结构
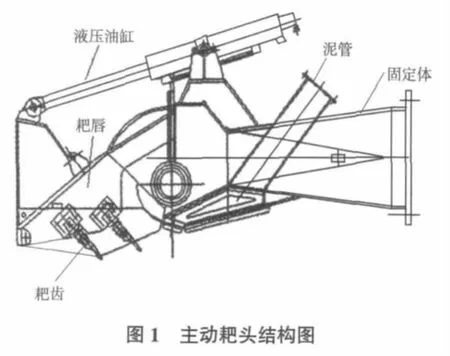
主动耙头的基本结构由固定体、耙唇、挡板、耙齿、连杆插销等组成,如图1所示[3]。耙吸船在挖泥过程中,是通过由泥泵提供动力,泥泵在运转时使耙头吸口内外产生压差,耙头周围的水以高速从缝隙中进入耙头内,运动的水流带动泥砂形成冲刷。同时,耙唇在液压油缸的伸缩作用下,安装在活动罩上的耙齿可以以不同的角度深入土中,利用机械方式破土切削,使泥砂松散,与水混成泥浆被吸入泥泵。
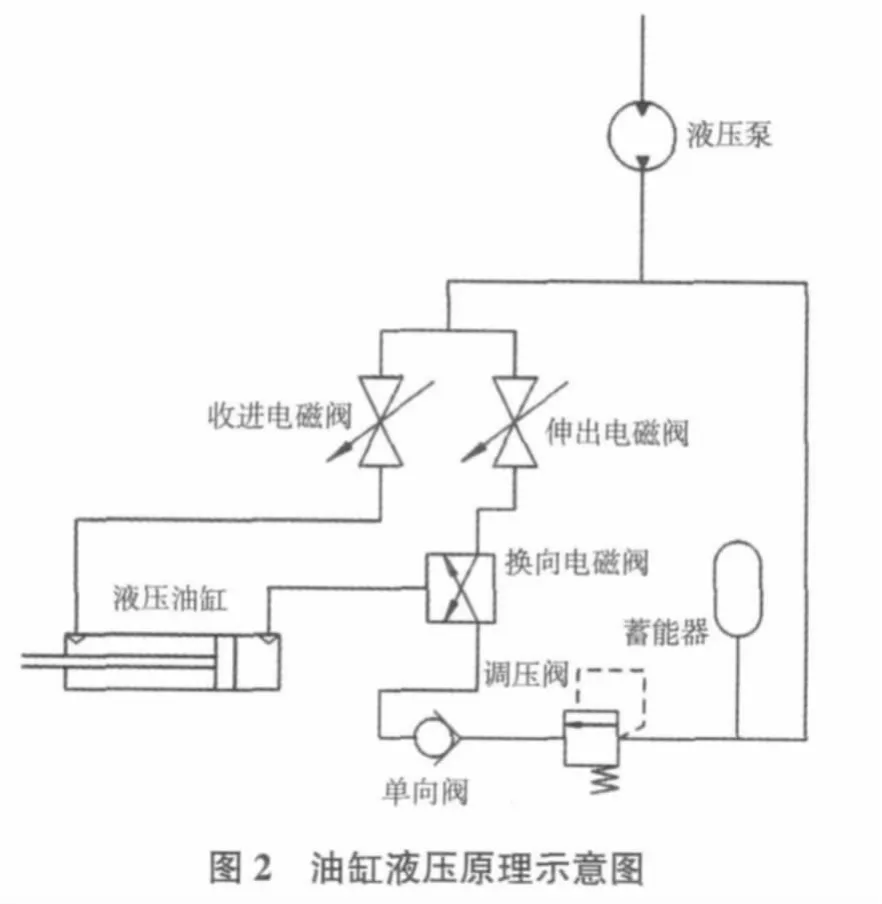
液压油缸的伸缩移动是通过控制电磁阀的动作来实现的,液压系统提供了两种不同的移动方式,一种是使控制伸出或缩进电磁阀得电,完全由液压泵直接推油缸移动。另一种是可以调节压力比例阀,使液压油缸无杆腔所受的背压不同,由耙齿所受外力和液压动力共同作用使油缸进行移动,如图2所示。第一种方式能够快速的移动油缸,到达指定的耙唇入土角度,但若频繁动作,会引起过大的液压冲击。第二种方式能够对不同土质,液压油缸所受压力不同时,仍然维持恒定的耙齿入土角度。在实际过程中,通过两种方式的结合,来实现液压油缸的行程控制。
1.2 主动耙头的运动学模型
在建立主动耙头运动模型前,先做以下假设:
1)主动耙头是一个刚体,形变可以忽略。
2)耙唇有一个入土角度,可以使挖泥效率最高。
3)认为液压油缸的固定端固定在耙管上,活动端固定在耙唇上,忽略相对固定的安装位置。
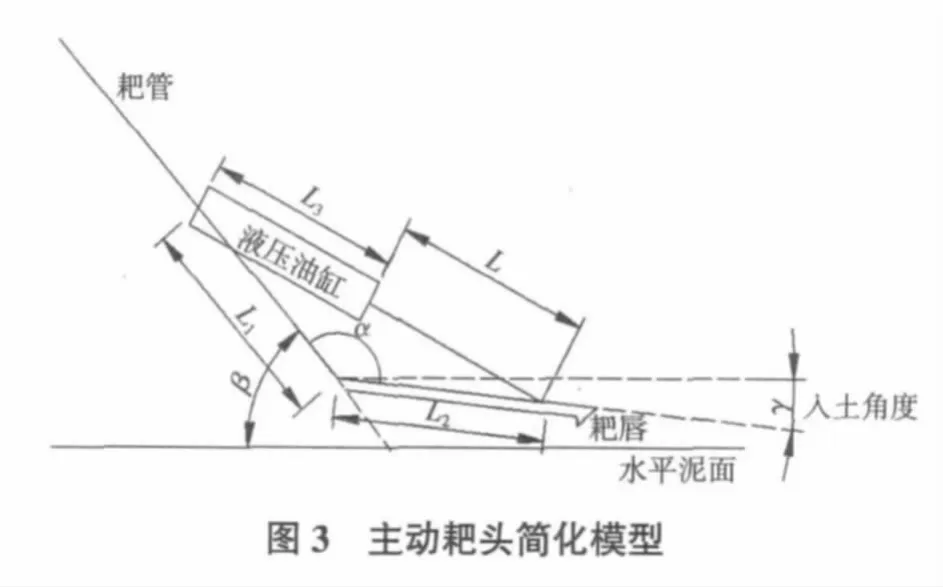
主动耙头简化模型如图3所示。L1为油缸固定体靠近耙管端到连杆插销的距离;L2为液压油缸活动杆端到连杆插销的距离;L3为液压油缸固定体的长度;L为液压油缸活动杆的长度;α为耙唇与耙管的夹角;β为耙管与水底泥面的夹角;γ为耙唇入土角度。
根据余弦定理可以求α与L的关系,可表示为:

式中:L1,L2,L3是固定值;L可以通过行程传感器测量获得;α,β与γ之间的关系表示为:

式中:β可以通过安装在耙管上的垂直传感器测量获得,这样就可以将期望的γ值,转化为期望的油缸行程L,输入到控制器中,可以完成对应液压油缸的伸缩控制。
2 模糊自适应PID控制器的设计
目前,常规PID控制器已被广泛应用于自动化领域,但常规PID控制器不具备在线整定控制参数KP,KI,KD的功能,不能满足系统的不同偏差e和偏差值变化率ec对PID参数的自整定要求,因而不适用于非线性系统控制[4]。
结合该控制系统的实际运行条件,设计采用模糊PID控制方法来实现主动耙头液压油缸的行程误差调节,将模糊控制和PID控制结合起来构成参数模糊自整定PID算法,用于伺服液压阀的控制,使控制器既具有模糊控制灵活而适应性强的优点,又具有PID控制精度高的特点,使控制系统兼顾了实时性高,鲁棒性强及稳定性等设计要点,还可以通过模糊控制规则库的改变,适应不同土质的控制要求。
2.1 参数模糊自整定PID控制器的结构
模糊PID控制系统结构框图如图4所示。系统输入为油缸给定行程L′,反馈值为通过行程传感器测量的油缸实际行程L,系统输出变量为液压压力调节阀变量u。控制器的输入为实际液压油缸的行程与给定行程之差e及其变化率 Δe,ΔKP,ΔKI,ΔKD为修正参数。

图4 模糊PID控制器结构图
PID 控制器的参数 KP,KI,KD由式(3)得到(KP′,KI′,KD′为 PID 参数初值):
2.2 行程控制输入输出变量模糊化
该行程控制器的输入为实际行程与设定行程的偏差值e,以及偏差值的变化率ec;输出量为PID参数的修正量ΔKP,ΔKI,ΔKD。它们的语言变量、基本论域、模糊子集、模糊论域及量化因子如表1所示。

表1 输入输出变量的模糊化
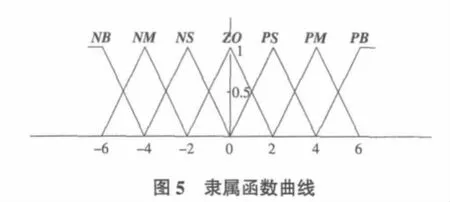
在模糊变量e和ec以及输出量ΔKP,ΔKI,ΔKD的语言变量和论域确定后,首先必须确定模糊语言变量的隶属度。常用的隶属函数有B样条基函数、高斯隶属函数、三角隶属函数等,考虑到设计简便及实时性的要求,采用了三角隶属函数,如图5所示。
2.3 参数自整定规则
模糊控制设计的核心是总结工程设计人员的技术知识和实际操作经验,建立合适的模糊规则表,得到针对ΔKP,ΔKI,ΔKD三个参数分别整定的模糊控制表。根据KP,KI,KD三个参数各自的作用,可制定模糊控制规则如表2、表3、表4。

表2 ΔKP的模糊控制规则

表3 ΔKI的模糊控制规则

表4 ΔKD的模糊控制规则
3 应用实例
实现模糊PID控制器算法的途径有很多种,如DCS、计算机或PLC等,目前,在耙吸式挖泥船中,应用最为广泛的是PLC控制系统。就上海航道局有限公司而言,基本上所用的耙吸式挖泥船的疏浚控制系统均采用SIEMENS系列S7-300或400PLC,而现在几乎所有PLC均提供自己的PID算法,因此只需实现应用模糊规则对PID参数进行自适应整定即可,以SIEMENS系列S7-400PLC作为实现模糊PID控制器算法的平台,对实现流程进行说明为例。S7-400PLC内部本身提供一种PID功能块(FB41)[5],该PID算法是一种位置算法,其表达式可简化为:
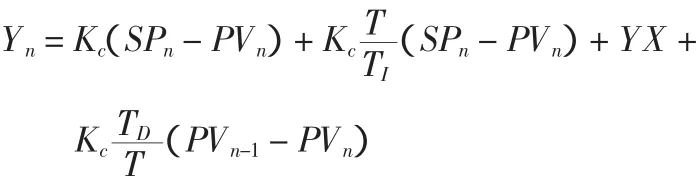
式中:Yn为采样时刻n计算出的回路控制输出值;Kc是回路增益;SPn是在采样时刻n的给定值;PVn是在采样时刻n的过程变量值;PVn-1是在采样时刻n-1的过程变量值;T是采样周期;TD是微分时间常数;TI是积分时间常数;YX是在采样时刻n-1的积分项。
在代码实现过程中,先在离线状态下将模糊规则表以二维数组的形式存储在PLC中,每次进入时间服务中断程序时,先读取存放在DB块中KC′,TI′,TD′,然后以PVn-SNn和(PVn-SNn)-(PVn-1-SNn-1)对应的模糊子集作为输入进行查表指令调用,经模糊控制器运算后输出了3个修正量(ΔKC、ΔTI、ΔTD),计算KC=ΔKC+KC′,TI=ΔTI+TI′,TD= ΔTD+TD′,将校正后的 KC、TI、TD作为执行 PID功能块的参数,同时将3个值送回到存放KC′、TI′、TD′地址块内,作为下次时间中断的初始值,就完成一次模糊PID控制过程。
主动耙头控制系统最终电气控制对象是电磁阀的动作,在误差比较大时,采用使控制伸出或缩进电磁阀得电的方式,为了减少响应时间,在这种方式下采用开环控制,使液压油缸快速接近期望的行程,当进入误差比较小的区间内,采用调节压力比例阀方式,采用模糊PID调节。SIEMENSS7-400 PLC中提供了模拟量的PID功能块,输出为0~100%的工程量,将此工程量进行量程转换化为4~20mA输出到比例阀。
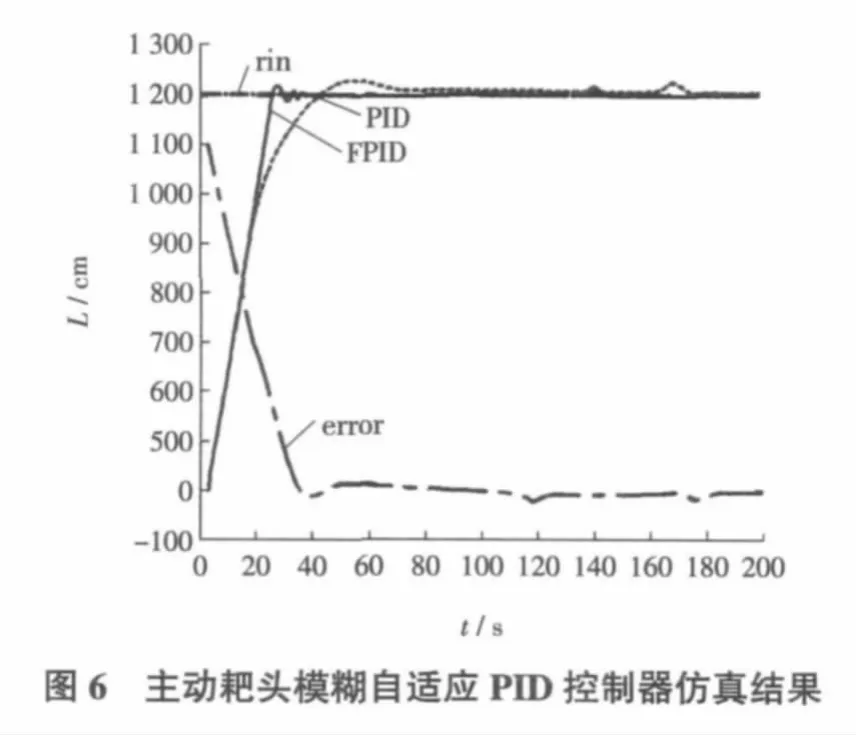
4 仿真及结果分析
为了验证该模糊自适应PID控制算法的合理性以及优越性,对模糊自适应PID控制系统进行仿真分析,通过MATLAB/SIMULINK对进行系统进行仿真,为了使模糊自适应PID控制的系统响应达到最佳的状态,经过反复地调试,运行仿真程序,得到主动耙头行程L响应曲线。同时,为了能够更加直观地看到模糊自适应PID(FPID)控制与常规PID控制各自的特点,将两种控制方法的响应曲线、给定输入(rin)和输入输出间误差(error)绘制在同一个图形中,如图6所示,可以看出,该模糊自适应PID行程控制系统具有更好的快速性,鲁棒性和稳定性。
5 结语
本文介绍了耙吸式挖泥船主动耙头的原理及其结构,并建立了主动耙头的运动学模型,并且将模糊自适应PID控制引入到主动耙头的控制中,以试图减轻操作人员的工作量,提高施工效率和精确度,同时,结合现有耙吸式挖泥船船控制系统的硬件环境,设计了基于PLC实现模糊自适应PID控制器的流程,并应用在中港疏浚有限公司11888方耙吸挖泥船“新海虎4号”轮,取得了一定的实际效果。
[1] 洪国军,王健,林风.自航耙吸挖泥船耙头模型试验研究[J].中国港湾建设,2008(4):19-22.
[2] James Carvajal,Guanrong Chen.Fuzzy PID Controller:Design,Performance Evaluation,and Stability Analysis[J].Information Science,2000,123:249-270.
[3] 丁勇,王忠贤.新型主动耙头的开发和应用[J].船舶,2005(1):52-55.
[4] 田琦,张国良,刘岩.全方位移动机器人模糊PID运动控制研究[J].现代电子技术,2009,32(5):131-133.
[5] SIEMENS.用于S7-300和S7-400系统和标准功能的系统软件参考手册[M].北京:Siements AG,2004:25-(1-3).
