基于模拟统计法的水声对抗试验航路优化
2012-03-07马国强曹海军
马国强,曹海军
(中国人民解放军91388部队,广东湛江 524022)
0 引言
水声对抗试验是靶场承担的一类重要的试验,由于组织一次水声对抗试验涉及的兵力众多,试验费用昂贵,组织实施复杂,因而不可能进行大量的试验。必须对试验航路的优化问题进行研究,根据研究结果,挑选出具有代表性的优化试验航路进行海上实航试验,使有限航次的海上实航考核更具有典型性、合理性,以有效控制并大幅度降低水声对抗试验的费用。
所谓水声对抗试验航路的优化问题,就是当舰艇发现鱼雷攻击时,舰艇何时发射对抗装置,采用何种方式规避以及如何发射对抗装置,才能使对抗鱼雷更加有效。研究试验航路的优化问题,一种比较传统而又成熟的方法便是采用基于模拟统计方法(Monte_Carlo)的仿真方法,该方法根据不同的试验态姿和条件,结合诱饵对自导鱼雷的声诱骗原理,按时间步长推演舰艇、鱼雷和诱饵三者之间的位置和状态的变化,在多种可穷举的航路中,根据优化航路的评估标准,最后确定一种优化航路。
1 潜艇水声对抗作战的一般过程及优化航路的参数选取
潜艇在进行水声对抗作战时,一般在潜艇鱼雷报警后经过一定的系统反应时间tR即可发射水声对抗器材。这里的系统反应时间包括从鱼雷报警到指挥员作出判断,定下决心,下达进行水声对抗的命令时间tC和下达对抗命令到系统准备好可以发射水声对抗器材的时间tp,因此有tR=tC+tp。
潜艇在受到自导鱼雷攻击时,若潜艇没有装备水声对抗器材,潜艇一般进行战术机动以摆脱鱼雷的攻击;若潜艇装备有水声对抗器材,则潜艇首先发射水声对抗器材,然后进行战术机动。为了取得最佳的水声对抗效果,潜艇进行水声对抗作战,不无例外地把发射水声对抗器材和潜艇本身的机动相结合。因此,在研究航路优化问题时把潜艇发射水声对抗器材和潜艇战术机动作为最基本的水声对抗作战模式。
潜艇规避来袭鱼雷的机动方式主要有3种[1]:变速、变深和旋回及它们的组合。常规动力潜艇水下速度不高,增速由于受到所携带能源的限制不便经常采用;减速往往对规避鱼雷反而不利,变深由于太慢也收不到良好的规避效果,所以旋回机动是最常用和有效的规避方法。因此,本文中选择潜艇旋回机动作为进行航路优化设计的基本模式。
试验航路优化最终是为了确定一种合理的战术态势。根据以上分析,最终把对抗器材的发射时机tF、对抗器材发射方向φ、防御艇规避方向θ这3个参数作为优化航路的参数[2]。
选取不同的tF,φ,θ,构成一种不同的战术态姿,每种试验态姿都可以取得评估指标,最后根据评估标准来确定最优的试验航路。在实际的模型建立中,假定对抗器材发射时机tF和潜艇开始旋回机动的时刻tR相同。
2 水声对抗优化试验方案的评估指标
利用1次仿真试验航路所记录的参数来评定该试验航路的优劣,显然不能用概率统计值来表达。因此,在确定某次水声对抗试验方案的优劣评估体系指标时,立足于在1次仿真对抗试验过程中记录的鱼雷、对抗器材、防御艇的参数来确定试验航路优化的评估体系。
1)有效对抗时间tE
当防御方潜艇发现来袭鱼雷攻击时施放对抗装备,使鱼雷丢失目标、跟踪诱饵或使鱼雷处于迷茫状态,鱼雷丢失目标、跟踪诱饵或使鱼雷处于迷茫状态的时间就是对抗装备的有效对抗时间。用有效对抗时间tE可以表示对抗装备在1次对抗自导鱼雷时的对抗效果。1次对抗试验中,有效对抗时间tE越长,水声对抗试验就越充分。
2)有效对抗距离R
防御艇发射干扰装备后,干扰装备对自导鱼雷实施有效干扰,自导鱼雷首次追上干扰装备时,自导鱼雷与防御艇之间的距离,称之为有效对抗距离,用R表示。

式中:[xT,yT,zT]为对抗过程中自导鱼雷首次追上干扰装备时鱼雷的坐标;[xy,yy,zy]为对抗过程中自导鱼雷首次追上干扰装备时防御艇的坐标。
3)最小雷目距离Rmin
防御艇实施水声对抗时,在发射声诱饵后,马上进行战术规避机动,如果实施对抗有效,则鱼雷总是首先捕获声诱饵并与声诱饵建立应答关系;在防御艇实施水声对抗的整个过程中,把鱼雷与目标之间的距离称之为雷目距离,即

式中:[xT(t),yT(t),zT(t)]为对抗过程中鱼雷的坐标;[xW(t),yW(t),zW(t)]为对抗过程中防御艇的坐标。
显然,雷目距离是时间的函数,把min(R(t))称之为最小雷目距离,并记为Rmin。
海上试验的安全是极其重要的问题,因此在优化航路的选取时,必须考虑到这个因素。
4)鱼雷出水点位置(xTE,yTE)
作为水声对抗试验用的鱼雷一般采用操雷,试验结束后要及时回收,否则很容易造成鱼雷丢失;水声对抗试验方案的仿真,除确保优化试验航路外,另一个重要的作用就是准确地提供水声对抗试验结束后鱼雷的出水位置,以确保在试验开始前捞雷船在预测的鱼雷出水点位置附近就位。
3 试验航路的优化标准
设计水声对抗试验航路的目的是为了充分考核水声对抗器材的对抗效果,因此,从水声对抗器材试验的角度出发,成功的航路设计至少应保证水声对抗器材对抗声自导鱼雷有效,不命中防御方潜艇,否则视为失败的试验航路设计;航路的优化设计建立在成功的航路设计基础之上。
航路的优化设计主要以水声对抗试验方案的评估指标为依据,以上指标对于航路的优化设计的权重不一样,我们把它分为3类,最小雷目距离Rmin为一类指标;有效对抗时间tE及有效对抗距离R为二类指标;鱼雷出水点位置(xTE,yTE)为三类指标。
根据以上分析,航路优化设计建立在成功的航路设计基础之上,因此一类指标最小雷目距离Rmin作为航路优化设计的最基本依据。假设鱼雷的自导作用距离为r,若Rmin<r,则该航次不认作为成功的航路。把Rmin≥r的试验航路称之为成功的试验航路,而最小雷目距离Rmin的数值大小不作为评定航路优化的第一标准,航路优化的第一标准主要由二类指标决定,有效对抗时间tE越大,则说明对抗试验越充分,有理由相信该航路最优。若成功试验航路的所有有效对抗时间tE相同,则把具有最大的有效对抗距离R的航路选定为最优试验航路。三类指标鱼雷出水点位置(xTE,yTE)作为捞雷船就位的依据,不作为评定试验航路优化的依据。
4 基于Monte_Carlo法的水声对抗试验航路优化设计
从理论上讲,利用Monte_Carlo仿真方法设计优化航路,应根据优化航路的参数选取标准,穷举各种对抗器材发射时机tE、对抗器材发射方向φ及防御艇规避方向θ,构成不同的战术态姿,根据每种试验态姿可以取得评估指标,最后根据评估标准来确定最优的试验航路。显然,这种运算量是很大的,为此必须根据水声对抗器材的实际作战使用要求,来选择典型的态姿进行优化。
从作战使用角度看,声诱饵的基本使用原则是作为假目标使用,发射声诱饵的目的是让鱼雷发现它并跟踪它而去,我艇则借声诱饵的掩护迅速规避,本艇规避的原则是尽快地与声诱饵拉开距离。因此,选择声诱饵发射航向的应遵循以下原则[3]:一是保证鱼雷先发现诱饵;二是鱼雷追踪诱饵过程中和追上诱饵进行再搜索时,离本艇越远越好。
利用Monte_Carlo仿真方法设计优化航路需要编制水声对抗作战过程的仿真软件,以某型自导鱼雷和某型悬浮式(自航式)诱饵为例,采用MATLAB语言进行仿真,并作如下约定:
1)攻方和防御方均为水下潜艇。在对抗作战过程中,仅考虑参战双方最简单的一对一的对抗方式,在1次对抗过程中,防御方仅采用单一的对抗器材对抗自导鱼雷,不考虑实际作战过程中的联合对抗方案,并且只交战1个回合;并且假定当鱼雷的航程耗尽或命中目标艇时,对抗过程结束;
2)选择旋回机动作为潜艇进行水声对抗作战仿真的基本规避方法,且不考虑防御艇的加速运动;
3)假定攻方和防御方潜艇均在同一水平面上;
4)用于对抗的自导鱼雷不具备真假目标识别能力;
5)自航式声诱饵的弹道仅考虑直航弹道。
4.1 坐标系的建立及初始参数的确定
要实现鱼雷在水声对抗环境下全弹道的仿真,首先要确定合适的坐标系。在实际仿真计算中,选择以鱼雷发射点为坐标原点,以正东方向为x轴,以正北方向为y轴建立计算坐标系。

图1 基于Monte_Carlo仿真计算的坐标系Fig.1Reference frame for Monte_Carlo simulation
图1中,L为自导鱼雷的射距;α为敌舷角;β为鱼雷射击最优提前角,由下面的公式确定[4]:

式中:λ为鱼雷自导扇面开角的一半;r为自导作用距离。
4.2 鱼雷自导检测模型
本文采用基于主动声呐方程的自导检测模型。噪声掩蔽下的主动声呐方程[5]可表述为

式中:G(α1)和G(α2)分别为发射和接收指向性函数;TS(φ)表示目标反射强度随入射角的变化,但对声诱饵而言,目标反射强度为一固定值,在仿真中设定,其数值要比潜艇目标的反射强度大许多。
在鱼雷弹道仿真的任一节点,当满足式(1),且目标落入鱼雷自导接收扇面λ内时,便认为鱼雷的自导系统检测到一次目标。
4.3 鱼雷的全弹道模型
自导鱼雷的弹道模型,采用数字积分法[6]进行等深水平面准全弹道模拟,每一时刻鱼雷运动方向及位置逐点累加,公式如下:

式中,ΔΨi的正负号决定鱼雷的操舵(正号操右舵,负号操左舵)。

4.4 悬浮式声诱饵对抗环境下的试验航路优化仿真
图2表示自导鱼雷首先捕获并穿过悬浮式声诱饵,进入环行搜索状态后自导鱼雷发现并命中目标的全程对抗图,表明对抗失败。

图2 悬浮式声诱饵对抗声自导鱼雷Fig.2A figure of buoyant decoy antagonizing homing torpedo
图3表示自导鱼雷首先捕获并穿过悬浮式声诱饵,环行搜索后自导鱼雷继续发现声诱饵并环行至航程耗尽,表明对抗成功。
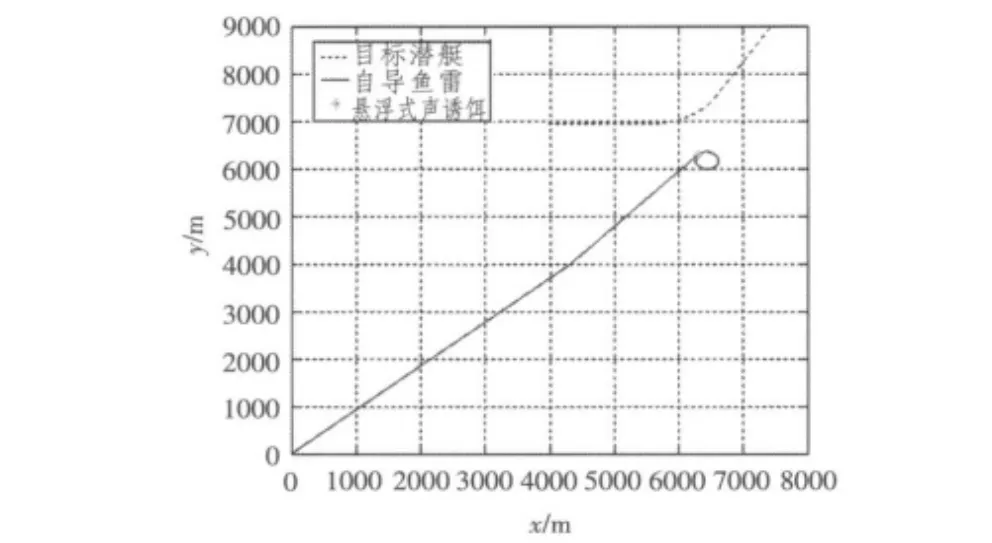
图3 悬浮式声诱饵对抗声自导鱼雷Fig.3A figure of buoyant decoy antagonizing homing torpedo
4.5 自航式声诱饵对抗环境下的试验航路优化仿真
图4表示自导鱼雷首先捕获并穿过自航式声诱饵,环行搜索后自导鱼雷发现并命中目标的全程对抗图,表明对抗失败。

图5表示自导鱼雷首先捕获并穿过自航式声诱饵,环行搜索后自导鱼雷继续发现声诱饵并环行至航程耗尽,表明对抗成功。
4.6 声诱饵对抗环境下的试验航路优化结果
在航路优化的仿真计算中,取目标潜艇的航向为正东方向,即航向角为0°,潜艇规避角定义为潜艇的航向与正东方向的夹角(假定逆时针方向为正);声诱饵发射角定义为声诱饵发射方向与正东方向的夹角,并且假定防御艇在发现鱼雷后经过水声对抗系统的反应时间30 s后,即发射对抗器材,通过比较有效对抗距离的大小,得到试验优化航路的参数见表1和表2。


5 结语
本文利用Monte_Carlo法,在一定的约束条件下,根据所建立的优化航路评估标准,对潜艇对抗自导鱼雷试验航路优化问题进行了探讨,并进行了计算机仿真,从仿真结果可以得出如下结论:
1)无论对于悬浮式声诱饵还是自航式声诱饵,3种不同态姿下的有效对抗时间都一样,表明鱼雷在搜索目标过程中一开始就受到声诱饵的诱骗,直至耗尽鱼雷的全部航程。出现这种情况的主要原因是防御艇的声呐报警距离较鱼雷自导作用距离要大得多,防御艇发现鱼雷后经过系统反应时间发射声诱饵,由于声诱饵的回波反射强度比目标的反射强度设定要大,因此,对于没有目标识别能力的鱼雷来说,是极易受到全程干扰的;
2)潜艇最佳规避角和诱饵最佳发射角之和大约接近180°,体现了声诱饵作为假目标使用的作战原则;
3)自航式声诱饵诱骗鱼雷时的有效对抗距离远大于悬浮式声诱饵诱骗鱼雷时的有效对抗距离。这可进一步确保潜艇的安全性,从而说明只要使用时机得当,自航式声诱饵的对抗效果要明显优于悬浮式声诱饵的对抗效果。
[1]杨日杰,高学强,等.现代水声对抗技术与应用[M].北京:国防工业出版社,2008.
YANG Ri-jie,GAO Xue-qiang,et al.Modern underwater acoustic technology and its application[M].Beijing: National Defense Industry Press,2008.
[2]马国强,刘朝晖,徐德民.潜艇对抗自导鱼雷的试验航路优化模型研究[J].鱼雷技术,2004,12(4):43-46.
MA Guo-qiang,LIU Zhao-hui,XU De-min.A study of trial route optimization model for submarine acoustic warfare[J].Torpedo Technology,2004,12(4):43-46.
[3]侯琳,胡波,章桂永.潜艇自航式声诱饵发射方向的仿真研究[J].计算机仿真,2009,26(6):23-25.
HOU Lin,HUBo,ZHANGGui-yong.Simulationof launching direction of swim-out acoustic decoy for submarine[J].Computer Simulation,2009,26(6):23-250.
[4]孟庆玉,等.鱼雷作战效能分析[M].北京:国防工业出版社,2003.
MENG Qing-yu,et al.Analysis of operational effectiveness for torpedo[M].Beijing:National Defense Industry Press,2003.
[5]刘孟庵.水声工程[M].杭州:浙江科学技术出版社,2002.
LIU Meng-an.Underwater engineering[M].Hangzhou: Zhejiang Science and Technology Press,2002.
[6]于昌荣,苗艳.潜艇使用自航式声诱饵防御声自导鱼雷模型研究[J].指挥控制与仿真,2009,31(3):61-64.
YUChang-rong,MiaoYan.Researchonmodelof defending acoustic homing torpedo using mobile acoustic decoy by submarine[J].Command Control&Simulation,2009,31(3):61-64.