角跟踪信号的动态模拟
2012-03-06兰宏志
兰宏志
(中国西南电子技术研究所,成都 610036)
在测控系统的研制和应用中,总希望有一套动态模拟[1]设备来验证天伺馈[2-3]系统的性能和状态,特别是对目标进入天线波束主瓣或者旁瓣时角跟踪[4]系统的状态参数的特征,需要在非任务状态下高度逼真地模拟出来,对操作人员进行训练的同时也检验了系统的状态。角度动态模拟要求数据处理的实时性好,以避免误差积累引起天线飞车。
1 角跟踪信号动态模拟的原理
角跟踪系统提取角误差信号的过程如图1所示,在接收单频信号时,以天线口径面为XOY平面建立正交坐标系[5]。

图1 角误差信号示意图Fig.1 Angle error signal diagram
当θ很小时,则和路信号 s∑(t)表示为

差路信号sΔ(t)表示为

式中,ωc为单频信号频率,A1为和路信号幅度,A2为差路信号幅度,μ为天线差斜率,θ为入射电波与天线电轴线的夹角,φ为入射电波在XOY平面的投影与X轴的夹角。
和差信号相乘:

和信号移相90°与差信号相乘:
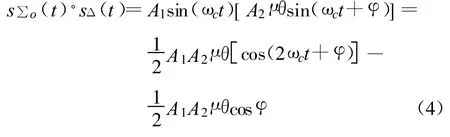
由上式可知,和差信号相乘,进行相干鉴相,通过低通滤波可以提取角误差信号。
方位误差电压UA和俯仰误差电压UE分别为
通过以上推导可以看出,方位、俯仰角误差信号与目标偏离天线电轴的角度 θ成正比。天线馈源输出的和差信号幅度差反应了天线指向与目标之间的角度差,于是可以通过控制和差信号的输出幅度来模拟天线指向与目标之间的角度差。
2 角度模拟实现
由于天线馈源输出的和差信号幅度差反映了天线指向与目标之间的偏移角,跟踪接收机提取角误差信号控制天线指向,可以建立和差幅度、角度偏移、角误差信号之间的对应关系,通过数控衰减器控制和差信号的幅度差,来模拟天线指向与目标之间的角度差,实现角度模拟。
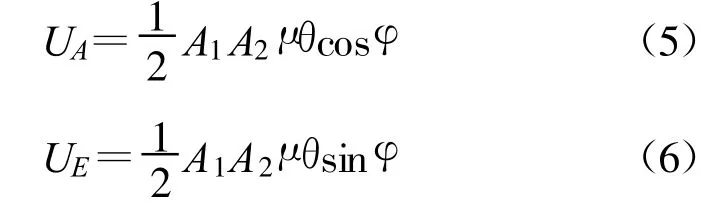
动态模拟角度特性时,根据和差归一化后的天线方向图计算出方位角度差、俯仰角度差对应的和差路幅度差,进而由和差路幅度差推算出对应的数控衰减器衰减量,将这种对应关系存入查找表中,模拟器接收轨道软件的角度信息和天伺馈的实时角度信息,求出两者之间的差值,根据角度差值,在查找表中查对应的衰减量,通过控制模拟器中的数控衰减器的衰减量就可以模拟角度变化时和差信号的幅度变化,实现角度模拟。角度模拟信号通过跟踪接收机提取角误差电压控制天线,按轨道软件提供的角度变化特性运动,实现角跟踪闭环。其实现框图如图2所示。在完成信号幅度随距离远近变化模拟后,射频信号一分为二,一路作为和路信号经和路衰减器输出,另一路作为差路信号再一分为二作为方位、俯仰差路信号,分别经方位、俯仰衰减及0/π控制后进行正交合成为幅度受控的角度模拟差路信号,和差衰减器的范围和角度可以根据角度模拟的范围和角度设计。
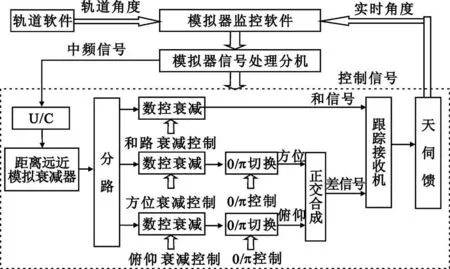
图2 角度模拟原理框图Fig.2 Angle dynamic simulation schematic diagram
2.1 主瓣模拟
当天线指向与目标之间的偏移角较小时,即目标在天线主波束内,和差归一化后的天线方向图可以简化为图3所示的模型。

图3 偏角较小时天线和差方向图Fig.3 Antenna sum and difference direction diagram in smaller slanting angle
和路信号衰减器根据差斜率指标置固定值,差路信号衰减器的衰减量,根据轨道参数中的角度数据与当前天线的实际角度差由方向图中角度偏移与和差幅度之间的对应关系推算出,跟踪接收机提取角误差信号,对天线进行控制,实现角度模拟功能。
2.2 旁瓣模拟
当天线指向与目标之间的偏移角较大时,即目标已到天线副瓣内,可采用图4所示方向图模型。和路信号衰减器及差路信号衰减器的衰减量,都要根据轨道参数中的角度数据与当前天线的实际角度差,由方向图中角度偏移与和差幅度之间的对应关系推算出,跟踪接收机提取角误差信号,对天线进行控制,实现角度模拟功能。

图4 偏角较大时天线和差方向图Fig.4 Antenna sum and difference direction diagram in large slanting angle
3 角度模拟精度分析
角度模拟的实现主要由和差信号衰减器实现,衰减器的量程、控制精度以及幅相一致性都会影响角度模拟的精度。角度模拟的和差方向图一般为近似模型,且实际模拟时都是把方向图模型离散化,取一些离散点来建立偏移角与和差衰减量对照表,把轨道参数中的角度作为目标位置,天线当前的角度作为实际角度,两者之差就是本次需要控制的角度,通过对照表查找到和差路的衰减量进行控制,整个过程中模型的构建、轨道参数控制点的疏密、控制的实时性都会影响角度模拟的角度,特别是控制的实时性不好造成误差积累可能导致跟踪曲线无法收敛。
对于入射电波与天线电轴线的夹角 θ的模拟,主要通过控制衰减器的衰减量实现,其控制精度与数控衰减器的精度有关。假设在 A及μ不变的情况下 ,θ1对应幅值 A1,θ2=θ1+Δθ对应幅值 A2,即A1=Aμ θ1,A2=Aμ θ2=Aμ θ1+Aμ Δθ,则有衰减值

如果将θ1理解为需要模拟的角度,θ2理解为实际控出的角度,则上式说明夹角θ的模拟精度不仅与衰减器的角度有关,也和模拟角度的大小有关。
如果目标位置与天线轴之间既有方位又有俯仰偏角时,θE与θA并不相等,需要进行正割补偿,满足θA=θE·sec ,其示意图如图5所示。
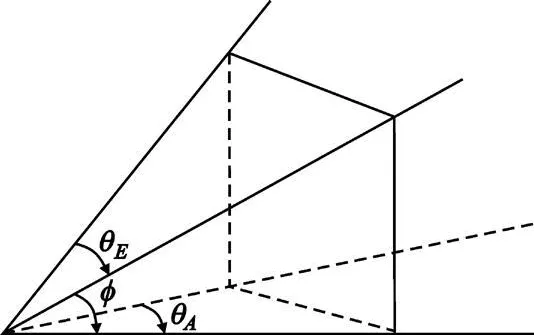
图5 正割补偿示意图Fig.5 Sec compensation diagram
4 结束语
本文阐述了角度模拟的原理以及主瓣和旁瓣模拟在工程中的实现方法,并对引起角度模拟误差的因素进行了分析,通过在陆基和海基测控系统中应用角度动态模拟设备,验证了根据天线方向图中角度偏移与和差信号幅度的对应关系进行角跟踪信号动态模拟的设想,处理的实时性和跟踪精度能够满足角跟踪系统要求,达到了验证系统功能检验设备状态和训练操作人员的目的。随着电子技术的不断发展,能否用全数字方法进行角跟踪信号动态模拟有待进一步研究。
[1]刘嘉兴.飞行器测控通信过程[M].北京:国防工业出版社,2010.LIU Jia-xing.Spacecraft TT&C and Communication Engineering[M].Beijing:National Defense Industry Press,2010.(in Chinese)
[2]赵业夫.无线电跟踪测量系统[M].北京:国防工业出版社,2001.ZHAO Ye-fu.Wireless Measure and Track System[M].Beijing:National Defense Industry Press,2001.(in Chinese)
[3]电子工业部第十研究所.统一载波测控讲义[M].成都:《电讯技术》编辑部,1977.The 10th Institute of Ministry of Electronic Industry.The Teaching Materials of Unified Carrier TT&C[M].Chengdu:Telecommunication Engineering Agency,1997.(in Chinese)
[4]兰宏志.测控信号的动态模拟[J].电讯技术,2012,52(6):902-905.LAN Hong-zhi.Dynamic simulation of TT&C signal[J].Telecommunication Engineering,2012,52(6):902-905.(in Chinese)
[5]苏勋,席文君.双通道跟踪接收机对地校相技术[J].电讯技术,2012,52(3):268-272.SU Xun,XI Wen-jun.Phase CalibrationTechnology of Dual channel Tracking Receiver with Ground Beacon[J].TelecommunicationEngineering,2012,52(3):268-272.(in Chinese)
