燃料电池建模与仿真
2012-03-05王伏龙肖铎
王伏龙,肖铎
(浙江大学城市学院,浙江杭州325000)
目前国内许多燃料电池的控制手段多半靠人工操作的方法进行,没有实现自动调节。H2和O2的流量都是按最大量进行,没有根据输出功率的要求适时适当的调节流量,造成了浪费,缩短了燃料电池的工作寿命,提高了成本。质子交换膜燃料电池是一个复杂三维的、多物理场、多相、多尺度、动态的,多输入单输出的多变量非线性变参数纯滞后的复杂系统[2]。因此,燃料电池的输出功率与许多因素有关,对于这样的系统建立数学模型十分困难。为此采用模糊控制算法进行自动调节是十分适宜的。而采用模糊控制算法对燃料电池进行建模,为燃料电池的正常、高效运作奠定了基础。
模糊控制的特点就是不需要对被控对象进行数学建模,它是根据专家总结的经验和专家知识的基础上实现自动控制的一种手段。本文利用模糊控制算法适时调节燃料电池的H2和O2流量和工作温度,从而改善燃料电池的输出性能,提高输出功率。
1 模糊控制算法
1.1 模糊集合与隶属度
模糊控制器1:将电功率误差e1和氧气流量O2作为两个输入,控制氢气流量H2的阀门的控制电压U1作为输出。模糊化输入量O2的变化范围为0~+3。模糊语言值为:

模糊控制器2:将电功率误差e1和氢气流量H2作为两个输入,控制氢气流量O2的阀门的控制电压U2作为输出。模糊化输入量H2的变化范围为0~+3。模糊语言值为:

模糊控制器3:将温度变化率e2和温度变化量T作为两个输入,控制风扇转速的控制电压U3作为输出。模糊语言值为:

隶属度采用三角形函数。隶属度函数依照的规则有:(1)隶属函数要遵从语意顺序,避免不恰当的重叠;(2)对同一个点没有两个隶属函数会同时有最大隶属度;(3)当两个隶属函数重叠时,重叠部分的任何点的隶属函数的和应该小于等于1。图1,2,3,4,5,6为各变量的隶属函数。O2和H2的隶属度函数相同,U1和U2的隶属度函数相同。

1.2 模糊规则
表1,表2,表3分别是模糊控制器1,2,3的主要的模糊控制规则表。图7为温度控制的模糊规则演示,图8为温度控制的输入输出变量特性。

选择控制量变化的原则是,当误差大或较大时,选择控制量以尽快消除误差为主。误差小时,选择控制量要防止超调。模糊推理的形式为:“if……and……then……”条件语句。
1.3 模糊判决
采用重心法进行模糊规则判决,所谓重心法就是取模糊隶属函数曲线与横坐标轴围成面积的重心作为代表点。在实际应用中一般计算输出范围内整个采样点(即若干离散值)的重心。这样在不花太多时间的情况下,用足够小的采样间隔来提供所需要的精度[3]。公式为:

2 燃料电池系统仿真
在系统设计过程中检验其能否达到预期目的是很重要的,但由于检验实际系统需要花费大量的资金和时间,所以往往利用计算机仿真系统替代实际系统,模拟实际运行情况,从而检验其有效性。Matlab中的Simulink环境可以直观明了地观察所设计模糊系统是否符合需要,也可以帮助分析和解决问题,指导系统的设计、修改以及完善系统。
利用仿真模型窗口建立仿真模型[3],模型如图9。

图9 仿真模型
质子交换膜燃料电池的最佳工作温度在75~85℃,由于热反应,电池内部温度将持续上升,导致燃料电池不能正常工作,所以我们用以上的模型模拟一个燃料电池的内部温度,Signal Builer器件为波形输入,我们将一个快速上升的波形并且使它稳定在100℃,输入控制器中。Gain K1为温度变化量的模糊化值等于量化论域除以实际论域,经过计算该值为0.015。温度变化率为温度变化量经过Derivative器件取导数得到,Gain1 K2为温度变化率的模糊化值等于量化论域除以实际论域,经过计算该值为0.09。2个输入量进出设计完成的模糊控制器输出一个模糊量经过解模糊,Gain2 K3风扇控制电压变化量的解模糊化值等于实际论域除以量化论域,经过计算得到该值为450。经过延时器反馈到最初输入波形。将原输入信号和处理输出信号通过Scope器件显示出来。
3 结论
仿真结果如图10所示。上面的线为设定温度曲线,实现为仿真温度曲线。如图所示,控制温度从0℃以一定速度上升到100℃,在80℃仿真曲线紧随设定曲线变化,当设定温度超过了质子交换膜燃料电池的最佳温度时,无论设定温度多高,仿真的温度依然保持在80℃左右。从图可知模糊控制器能很快响应设定温度的变化,控制温度在最佳工作温度范围内波动,并趋于稳定。
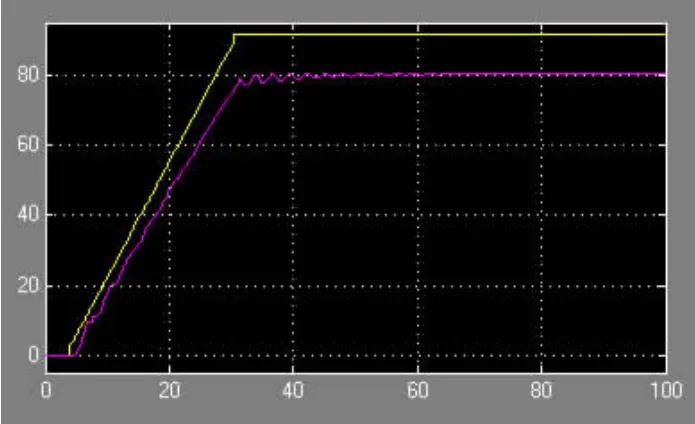
图10 仿真曲线
[1] 周未,王金全,仲未秧.PEM燃料电池的应用前景[J].电池工业,2004,9(4):208-212.
[2] 涂曙光,张禾,杜传进,等.PEM燃料电池动态特征的仿真分析[J].电源技术,2009(11):997-1000.
[3] 张德丰.MATLAB模糊系统设计[M].北京:国防工业出版社,2009.
