并联式混合动力汽车再生制动控制策略仿真研究
2012-02-26商高高欧昌杰孙钦云
商高高, 欧昌杰, 孙钦云
(江苏大学汽车与交通工程学院,镇江 212013)
再生制动是将汽车制动时车辆的部分动能转化为电能,存储在电池或电容中,可以再次使用,因而在混合动力汽车的研发中,再生制动成为一个重要的方向.
研究表明:影响混合动力汽车的再生制动的主要因素有制动控制策略、储能装置的性能、再生制动系统的工作效率和使用环境等.其中,制动控制策略具有决定性的意义[1-2].
文中以某前轮驱动的并联式混合动力汽车为例,结合相关工程经验和逻辑控制方法,制定再生制动能量管理策略,运用Cruise和Simulink软件对并联式混合动力汽车再生制动控制策略建立模型,进行仿真研究.
仿真结果表明,该控制策略在选定的工况,保证安全性的前提下,能较多地回收制动能量,可为进一步实车研究提供指导和借鉴.
1 PHEV仿真平台建立
首先利用Cruise建立PHEV整车模型,然后在Simulink下建立控制器模型.
1.1 Cruise整车模型
利用Cruise建立如图1所示的双轴并联式混合动力汽车仿真模型.
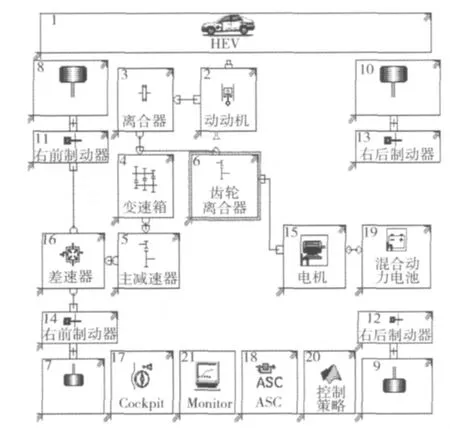
图1 整车仿真模型
AVL公司开发的Cruise是用来进行车辆仿真和传动模拟的软件,可以研究汽车动力性、燃油经济性、排放性及制动性.灵活的模块化理念使得Cruise可以进行任意结构形式的建模和仿真,同时完善的算法程序以及与Matlab/Simulink良好的接口功能使其在车辆建模和仿真中具有非常大的优势[3-4].
1.2 Simulink控制模型
Simulink是MATLAB中的一种可视化仿真工具,可以方便地建立框图式动态系统模型,具有直观、方便、灵活的特点.对于控制算法的开发和策略研究,Simulink能够非常直观和方便地进行模拟和分析.根据设计的控制策略,利用Simulink建立如图2所示的控制模型.

图2 制动力分配控制模型
该模型输入信号为制动强度、车速、电池SOC和电机所能提供的最大扭矩,输出信号为制动信号、前轮液压制动力、后轮液压制动力和电机需求制动力.模型中ideal distribution子模块为理想制动力分配模块,modify子模块为制动力修正模块.
1.3 Cruise与Simulink的信号连接
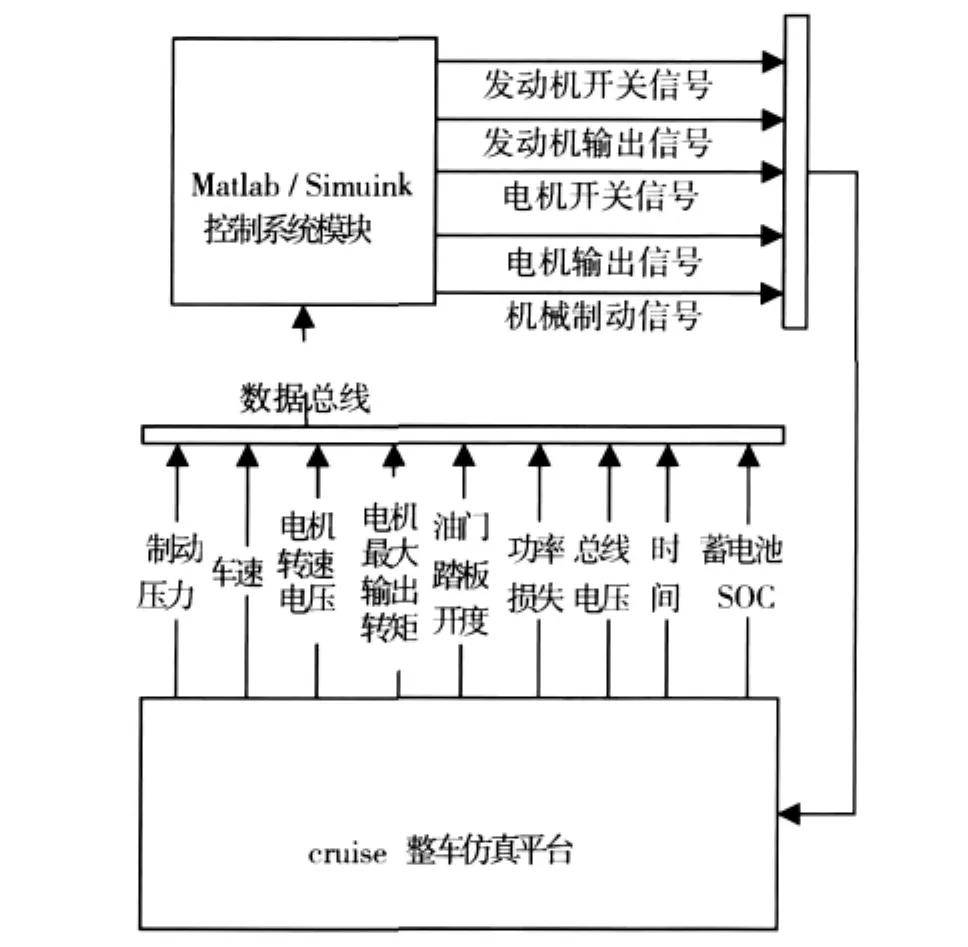
图3 Cruise与Matlab/Simulink信号通信
Cruise与Matlab/Simulink之间的信号通信是通过Cruiese软件的Matlab API或是Matlab DLL接口,文中采用Matlab DLL接口.在定义好Simulink控制模型的输入、输出向量后,设置系统环境变量,运行AvlRtwDll_*.exe,在Matlab的命令窗口中运行Install.m,在RTW下生成DLL动态链接库文件.Cruise中的各个模块之间的信号是通过数据总线 Data-Bus传递的.图 3为 Cruise与 Matlab/Simulink的信号通信.(Z≤0.1)、中等强度制动 (0.1≤Z≤0.7)和紧急制动 (0.7≤Z).如图4所示,小强度制动工况时,全部制动力由前轴提供,后轴制动力为0,而前轴上制动力全部由电机提供,以便能尽量多的回收能量.中等强度制动工况时,制动力由前后轴共同提供.在满足法规界限的前提下,优先使用电机制动,在A点前,前轴制动力全部由电机提供,后轴制动力由液压摩擦制动提供;在A点电机达到最大制动扭矩后,前轴制动力由电机和液压摩擦制动共同提供,后轴制动力由液压摩擦制动提供.紧急制动工况时,由于液压系统可靠性高,制动力将全部由液压摩擦制动提供以保证紧急制动时的安全性,整车制动模式为液压摩擦制动模式.

图4 制动力分配控制策略曲线
2 控制策略设计
为了充分利用电机的制动能力,尽量多的回收制动能量,制定了在一定范围内提高前轴制动力,并且满足ECE制动法规的制动力分配策略.该策略能在保证制动稳定性和兼顾驾驶员制动感觉的前提下,充分利用电机的制动能力,最大限度的回收制动能量.
首先根据制动踏板开度信号、电池SOC信号以及车速信号判定是否采用电机制动,如符合设定的条件再根据制动强度对制动力进行分配.
将制动强度分为以下3种形式:小强度制动
为了优化制动感觉,减少制动模式切换时电机扭矩突变给整车带来的冲击,使制动更加平稳,在控制策略中,加入了制动力修正模块.当SOC达到0.8时,给予电机的转矩会随着SOC值的增加而递减,减少的部分由液压摩擦制动提供.图5为制动力分配控制策略的流程图,其中,Tm为电机扭矩,Thyd为液压摩擦制动力,Treq为需求制动力,Tf为前轴制动力,Tr为后轴制动力.
电机制动力修正控制函数如下
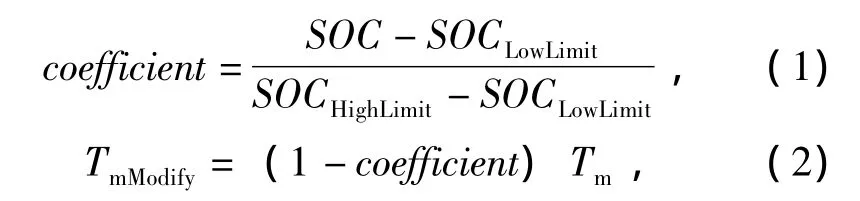
式中:SOCLowLimit值为 0.8;SOCHighLimit值为 0.9;TmModify为修正电机转矩.
再生制动时,电机可提供的最大再生制动转矩是根据电机转速信号,结合电机特性信号,通过查表获得.

图5 制动力分配控制策略流程图
3 仿真及结果分析
在Cruise的Matlab DLL模块中指定前面所生成的DLL文件的位置后,可以进行整车仿真计算,并对控制策略进行验证和评价.
整车主要参数见表1.
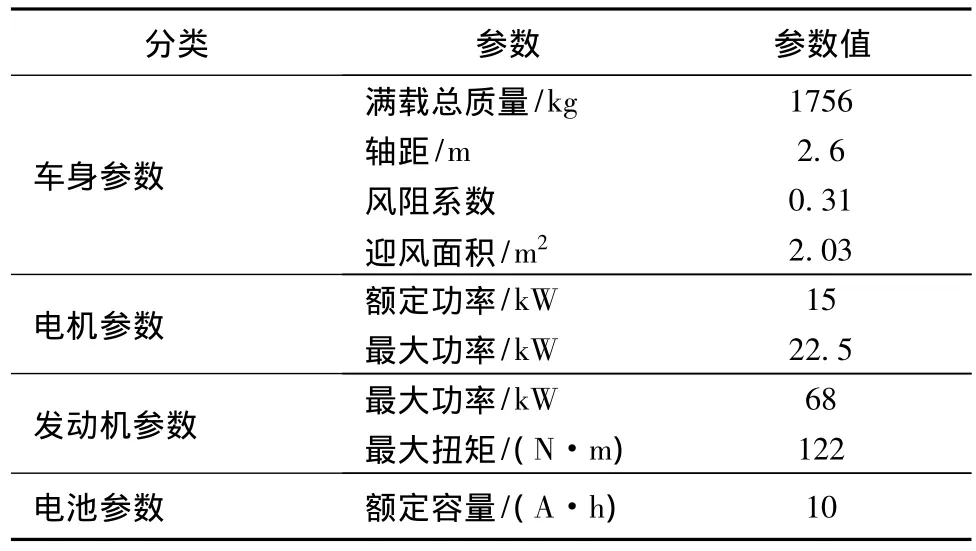
表1 整车仿真参数表
电池初始SOC取0.7和0.8,SOC取0.8时用以验证优化制动感觉的控制策略能否实现.所选取的起止车速如表2所示,同时,由于我们的控制策略中分为不同的制动模式,为了验证控制策略的可行性,在良好平直路面,不同的起止车速条件下,选取小强度、中等制动强度、紧急制动3种典型制动工况对整车再生制动系统进行仿真.

式中:V0为初始SOC对应的充电电压;V1为结束时SOC对应的充电电压;C为电池容量.
仿真结果统计如表2所示.

表2 Cruise制动仿真统计表
通过上表可以看出,回收能量的多少与起止车速、制动强度、制动时间、电机均有关.文中设计的再生制动控制策略在各种制动工况下都能满足法规要求,总体能量回收效率比较高.
轻度制动时,能量回收率在30%左右,因为此时制动力矩主要由电机施加,制动时间比较长,能量回收充分.当车速从30 km/h降低到0时制动效率较低,这是由于制动初始车速低,而电机低转速时无法提供高的充电电压造成的[5].
中度制动时,能量回收率较低,因为制动时间较短,而且液压制动也占一定比例的缘故.同时发现,轻度制动和中度制动中,起止车速为50-30 km/h和80-50 km/h时,能量回收率高于对应的其它项目,这是因为电机在低转速时,无法提供高的充电电压,在较高转速时,转矩降低,此起止车速范围内电机提供的转矩较高,能量回收率较高.
紧急制动时,能量回收率为0,说明电机没有参加制动,符合设计目标.
初始SOC为0.8时,轻度制动的能量回收率比初始SOC为0.7时均低,说明电机施加的力矩减少,符合设计的控制策略,使制动感觉得以优化.
5 结论
在Cruise和Simulink联合仿真平台上,实现了根据制动踏板位置、SOC以及车速,动态控制再生制动转矩控制策略的仿真.从仿真结果可以看出,提出的并联制动控制策略可在保证安全和兼顾驾驶员的制动感觉的前提下较多的回收制动能量.
[1] GAO Wenzhong, Sachin Kumar Porandla. Design Optimization of a Parallel Hybrid Electric Powertrain[C]. IEEE conference on vheicle power and propulsion,2005:530-535.
[2] 舒 红,秦大同,胡明辉,等.轻度混合动力汽车再生制动能量管理策略 [J].机械工程学报,2009,45(1):167-173.
[3] 喻 皓.基于Cruise的增程式纯电动汽车仿真匹配分析 [J].机电工程技术,2010,39(8):28-30.
[4] 于永涛,曾小华,王庆年,等.混合动力汽车性能仿真软件的可用性仿真验证 [J].系统仿真学报,2009,21(2):380-384.
[5] Cikanek Susan R.Bailey Kathleen E.Energy recovery comparison between series and parallel braking system for electric vehicle using various drive cycles[C].Advanced Automotive Technologies(DSC),1995,56:17-31.
