数字全电式坦克炮控系统研究现状与发展
2012-02-22马晓军袁东臧克茂李长兵闫之峰
马晓军,袁东,臧克茂,李长兵,闫之峰
(装甲兵工程学院控制工程系,北京100072)
0 引言
炮控系统是坦克火力控制主线末端的执行系统,承担着驱动和稳定坦克火炮/炮塔的作用,是充分发挥火控系统性能,实现“先敌开火、首发命中”的重要保证。随着战场需求的不断变化,坦克机动性能大幅提高,火炮口径不断增大,炮塔重量也随之不断增加,且需要在高机动复杂条件下对远程目标实施快速精确打击,这对坦克炮控系统的战技性能、可靠性和信息化水平等提出了更高的要求和新的技术挑战。
为适应武器装备的发展要求,20世纪90年代以来,各种高新技术不断应用于炮控系统,使其结构模式与控制方式发生了根本性的变化,呈现出全电化、数字化的发展趋势,即发展为数字全电式坦克炮控系统。全电式炮控系统是指水平向和高低向分系统都采用电机通过动力传动装置驱动炮塔和火炮的系统结构模式[1]。较之传统的电液式/全液式炮控系统,具有结构简单、性能优良、效率高等特点,且不存在“二次效应”的危害,因此成为世界各国努力发展的方向,如法国的“勒克莱尔”坦克、英国的“挑战者”系列坦克、德国的“豹”2A5/A6 坦克、以色列的“梅卡瓦”4坦克等均已安装了全电式炮控系统[2-3]。
图1为全电式炮控系统的一般结构。按照功能,可将炮控系统划分为动力系统和控制系统2 部分。动力系统主要由供电装置、功率放大装置、驱动电机、动力传动装置等构成;控制系统主要由炮控系统控制箱和驱动控制箱(有的炮控系统2 者合在一起),辅以相应的操纵装置(操纵台)和信号检测装置(陀螺仪、测速电机和LEM 模块等)构成,为了提高系统的性能,较新型的炮控系统还增加了前馈装置,构成复合控制结构。
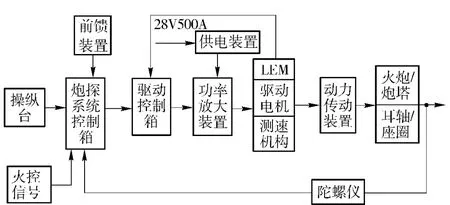
图1 全电式炮控系统结构Fig.1 Structure of all-electrical tank gun control system
按照系统结构划分,以下从动力系统和控制系统2 个方面论述近年来国内外在炮控系统全电化及其数字控制方面的研究进展,探讨未来数字全电式炮控系统的发展趋势及其技术途径。
1 动力系统研究
1.1 电机及其驱动装置
为了实现炮控系统在发现目标时以最大速度转向目标,且在接近目标时迅速停下来,然后以较低的速度精确跟踪目标运动,要求电机及其驱动装置具有优良的调速性能,如调速范围宽、起/制动时间短、超低速运行时转矩脉动量小等。
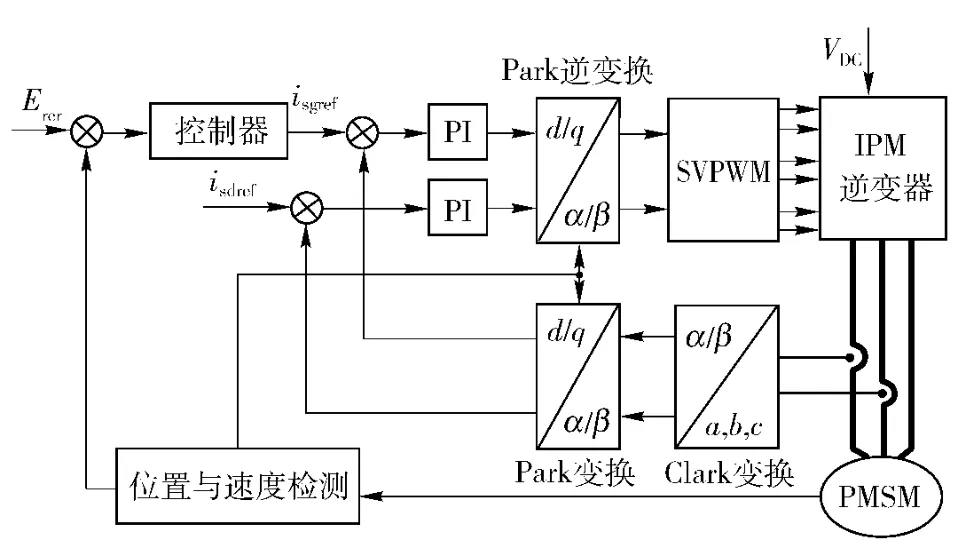
图2 永磁同步电机的SVPWM 控制结构图Fig.2 SVPWM control structure of permanent magnetic synchronous motor
文献[4]采用“永磁同步电机+逆变器+SVPWM 控制”结构模式,将交流调速技术用于全电炮控系统,研制出我国第一套交流全电式坦克炮控系统,其驱动控制结构如图2所示。该系统克服了传统直流全电炮控系统由于存在电刷和机械式换向装置,导致的功率密度受限、维护保养烦琐,且调速范围难以提高等问题,系统最低瞄准速度达到0.021°/s,且质量和体积大幅减小,系统效率提高了35%.为了改善炮控系统的低速性能,文献[5]在分析逆变器死区时间作用原理的基础上,提出了一种基于DSP 的SVPWM 死区时间补偿方法,有效抑制了低速运行时死区时间引起的电机转矩脉动,改善了系统低速运动的平稳性;文献[6]设计了永磁同步电动机定子磁链全维状态观测器,实现系统在低速区对定子磁链的准确观测,从而提高系统低速运动性能。文献[7]针对永磁同步电机运行过程中参数变化造成的控制性能下降,在图2所示的矢量控制结构中,利用d/q 轴的电压、电流及其偏差,借助Popov 超稳定理论建立了对电阻、电感和永磁磁链等参数的辨识模型并推导出待辨识参数的自适应律,保证了特定条件下系统的稳定性和参数的收敛性。
1.2 高压供电及其功率变换技术
随着坦克火炮打击距离的增加和炮塔防护能力的提高,火炮口径增大,身管增长,炮塔重量增加,使炮控系统的需求功率随之增大。此外,为了实现高机动复杂条件下对远程目标的快速精确打击,要求火炮/炮塔具有高动态、大扭矩输出响应等动态特性,这也致使炮控系统驱动功率的大幅增加,如“勒克莱尔”坦克的驱动功率达到了30 kW 以上。
为克服系统功率大幅增加给逆变器和驱动电机带来的设计制造难度,文献[8]提出了炮控系统高压供电方案,并设计了基于推挽变换拓扑结构的升压变换装置,将车辆28 V 低压电源转换为270 V 高压直流电源供系统使用,其主电路拓扑如图3所示。装置采用特殊的变压器绕制工艺和拓扑电路布局,解决了变换器存在的偏磁和主功率管关断尖峰大等问题,具有稳压精度高、动态响应快等特点。
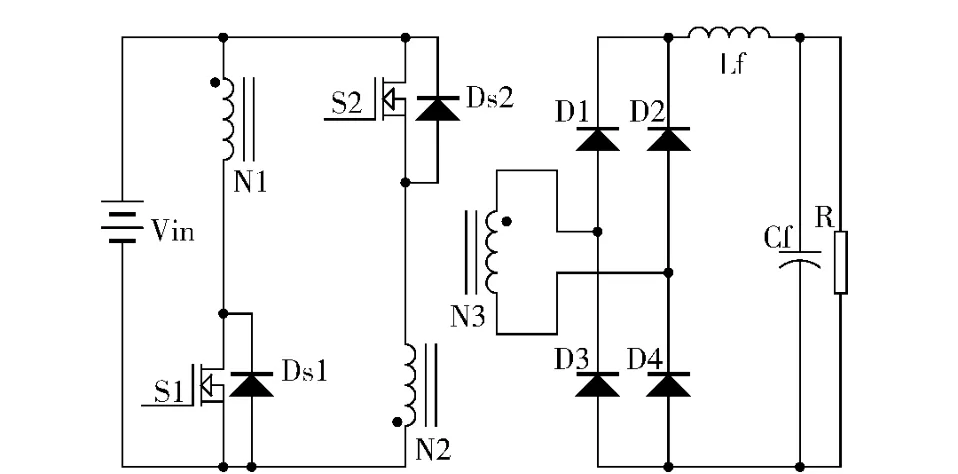
图3 升压装置推挽变换拓扑结构Fig.3 Boost inverter device adopted push-pull topology
为适应系统高动态、大扭矩输出响应等要求,新型坦克炮控系统在升压装置输出直流母线侧增加了超级电容器(如图4所示),用于提供较大的瞬时功率,提高系统的加速性能;同时超级电容器还作为馈能装置,吸收系统制动过程产生的电能,抑制母线泵升电压,从而进一步改善系统的动态特性[3]。
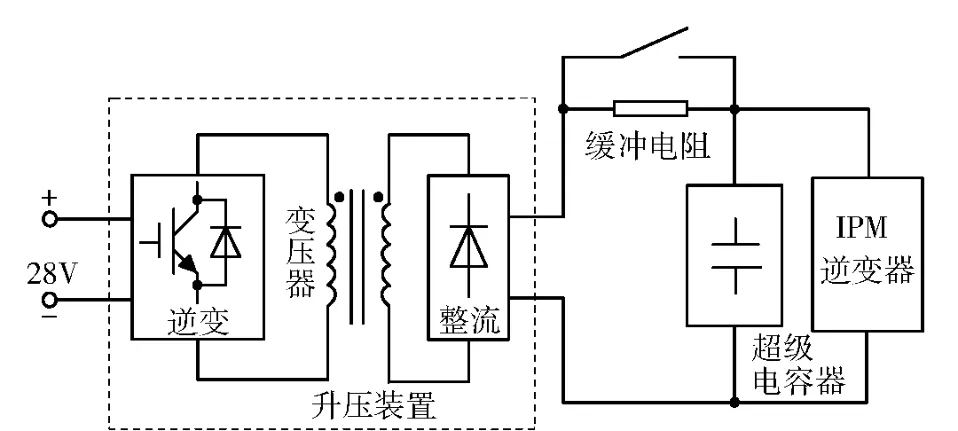
图4 带超级电容器的系统供电体系Fig.4 Power supply structure included ultracapacitor
随着装甲车辆供电体制的变化,采用双稳压发电系统为炮控系统提供高压直流电源的研究也逐渐深入。目前装甲车辆中研究较多的是双绕组永磁同步机发电系统,但由于永磁机不能通过调节激磁电流实现稳压控制,因此低压28 V 和高压270 V 双路输出都需要额外增加DC/DC 变换器,实现稳压输出。针对上述问题,文献[9-10]研究了一种采用PWM-VSI 逆变器控制的独立定子双绕组(分别为功率绕组和控制绕组)鼠笼型感应发电机,文献[11]提出将其控制绕组改进为高压功率绕组,并采用瞬时无功理论对两路稳压策略进行解耦控制,从而实现了发电系统高低压(270 V/28 V)双路稳压输出,且不再需要DC/DC 变换器,系统体积和效率均得到了明显的改善。
1.3 动力传动装置研究
全电炮控系统水平向和高低向分系统均采用电力传动方式。为了减小体积和质量,提高驱动电机功率密度,电机转速一般设计为每分钟几千转,因此需要采用由多级齿轮组成的动力传动装置(如水平向采用方向机,高低向采用齿弧等)将其速度降到驱动火炮/炮塔运动所需要的速度。由于齿轮啮合必须满足一定的最小间距才能保证不发生滞塞,因此这种传动方式不可避免的存在齿圈间隙[12-13],其模型如图5所示。

图5 齿隙模型Fig.5 Model of backlash
文献[14]对齿轮传动机构中的间隙、刚性等非线性特性进行了分析。文献[15]建立了包含齿隙等非线性因素的炮控系统数学模型,并开展系统运动性能分析,研究结果表明,齿隙的存在会对炮控系统产生如下2 个方面的影响:1)由于齿隙期间相对运动造成的驱动延时;2)相对运动结束时由于速度差异造成的冲击振荡。这些影响会造成炮控系统输出误差,甚至会使得系统因极限环振荡或冲击而降低性能或失稳[13]。因此如何提高系统的传动精度,减小齿隙影响成为近年来动力传动装置研究的一个重要课题。
在水平向传动装置研究方面,文献[16]在分析方向机中各传动级间隙对系统整体传动性能的影响的此基础上,提出了“同力面混合少齿差行星传动”方式,使多齿同时啮合,相互补偿,使方向机整体间隙减小了1/2,有效地提高了方向机的传动精度和传动效率。文献[17]提出采用多电机驱动方式,即通过2 个驱动电机对同一从动轴的施加大小相等,方向相反的偏置力矩抑制齿隙的影响。这种驱动模式克服了传统单电机驱动时齿隙期间存在的不可控性,但系统运行过程中,实际参与的驱动轴数目往往呈现出波动状态,致使其难以完全消除齿隙影响。针对上述问题,文献[18]应用Backstepping 方法,设计了双电机驱动系统状态反馈自适应控制器,有效地抑制了齿隙影响,同时保证了系统的渐进稳定。
对于高低向动力传动,早期的全电炮控系统采用齿弧作为传动装置,如英国的“奇伏坦”、“挑战者”1 和“挑战者”2 坦克。这种传动方式的降速比小,空回误差大,定位精度差,难以满足系统高精度瞄准与稳定要求。
随着螺旋传动制造技术的发展,德国“豹”2A5等坦克采用ESW 公司研制的滚珠丝杠作为高低向传动装置提高传动精度。丝杠采用行星传动方式,安装于火炮下方,当驱动电机旋转时带动行星丝杠螺母旋转,推动丝杠运动,实现火炮的瞄准与稳定[3]。文献[4]将滚珠丝杠、驱动电机和电磁制动器等机构巧妙的安装结合在一起,构成高低向电动动力缸,具有结构紧凑,安装方便,传动精度高等特点,其装配结构如图6所示。

图6 永磁同步电机和丝杠副的装配结构图Fig.6 Assembly of PMSM and ball guide screw set
文献[19]在滚珠丝杠副中滚珠的螺旋运动与受力分析的基础上,探讨了影响丝杠空回程角的主要因素,并进一步研究了减小空回程角,提高滚珠丝杠传动精度的几种措施。
除了传动精度,强度和“回传”能力设计也是传动装置研究要解决的一个重要问题。由于坦克火炮轴线与火炮旋转耳轴中心线往往不重合,火炮射击过程中存在明显的翻转力矩,会对高低向传动机构形成强烈的短时冲击[1,5],不论是高低齿弧传动装置,还是滚珠丝杠传动装置,研制过程中均有被这种冲击力损坏的实例。为避免冲击对传动机构的损害,一方面要提高传动机构本身强度,如选用滚柱丝杠替代滚珠丝杠,增大齿轮-齿弧接触面和强度;另一方面要使传动机构具有良好的“回传”能力,使其能够通过摩擦制动器的“打滑”吸收冲击能量,或者在传动机构中设计缓冲环节,减小冲击力。
2 控制系统研究
2.1 信息检测与状态估计
状态信息检测是实现系统控制的基础,因此,信息检测与处理是控制系统设计面临的首要问题。为了提高检测的精度和实时性,各种新型检测装置不断应用于炮控系统,以陀螺仪为例,早期的坦克炮控系统中应用的是框架陀螺,其检测精度较低。随着科技的不断发展,液浮陀螺逐渐应用于炮控系统,基本原理是将陀螺悬浮于浮液内,利用所排开的液体的浮力协助支承陀螺框架,减小框架轴承的负荷和摩擦力矩,从而获得较高的检测精度。文献[4]中应用挠性陀螺仪,采用挠性支承技术替代液浮技术,从而取消了液浮陀螺中的浮液加温装置,具有体积小、耗电低、工作准备时间短等优点。
除了提高检测装置本身的性能外,采用各种先进算法对测量噪声进行滤波,并利用测量信息估计系统中其他难以测量或不可测状态信息也是控制系统研究的重要内容。文献[20]针对永磁同步电机中安装速度传感器会增加转轴惯量,影响系统动静态性能的问题,提出了采用高频注入速度辨识方法实现无速度传感器调速,即通过给电机注入高频电压,并检测相应的电流值来估计电机转子的位置和转速,该方法适用的速度范围较宽,且在低速时也可得到较好的估算结果。文献[21]设计了基于串联ESO 的炮控系统非线性状态估计器,利用陀螺仪等少数测量信息实现对系统各状态变量的实时估计,并采用条件限制动态补偿方法,有效地提高了状态变量的估计精度。
2.2 系统控制策略与控制结构研究
炮控系统是一个强本质非线性系统。如前所述,系统中的动力传动装置存在齿圈间隙、弹性形变等,炮塔/火炮和座圈/耳轴之间存在摩擦力矩,火炮本身还有参数漂移等非线性因素,此外,在车辆运动过程中火炮还会受到车体振动的影响[22]。传统的PID 控制方法难以补偿各种非线性因素的影响,因此只能以牺牲响应频带,降低开环放大倍数获取系统的稳定性,从而造成系统动态响应慢,低速稳定性能差等问题,已成为了制约系统性能进一步提升的瓶颈之一。
随着现代控制理论的发展和装备研究的不断深入,近年来,鲁棒控制、自抗扰控制、滑模变结构控制、自适应控制等一些现代控制方法不断应用于炮控系统的非线性补偿控制中,为炮控系统的性能提高进行了有益的理论探索。如文献[23]从静态解耦和动态解耦2 个方面研究了交流全电炮控系统中的多种鲁棒控制方法,使炮控系统对参数变化和负载扰动具有较强的鲁棒性,并表现出良好的跟踪性能;文献[24]在分析炮控系统的各种非线性特性及其影响的基础上,借助“系统总扰动”的思想,引入自抗扰控制技术,采用“跨阶控制”方案,实现了系统的非线性补偿控制;文献[25]采用模型预测控制抑制炮控系统扰动影响,获得了良好的控制性能;文献[26-27]根据扩张状态观测器和Popov 超稳定理论,提出了一种基于ESO 滤波的模型参考自适应控制方法,增强炮控系统的快速性,并克服了低速“爬行”问题。
在控制结构上,早期的炮控系统一般采用双闭环控制结构。为进一步提高系统的稳定精度和反应速度,较新型炮控系统采用复合控制结构,即在传统闭环控制的基础上增加了采用按扰动控制的前馈通道,扰动信号由车体陀螺和线加速度计测量。但在实际系统中,由于各种不可测扰动的影响,复合控制难以做到完全补偿。
文献[28]提出“双模双环”控制结构(如图7所示),通过逻辑切换的方式,实现炮控系统变结构控制。瞄准工作模式时由电流环和速度环组成双闭环速度控制系统;稳定工作模式时由电流环和位置环组成双闭环位置控制系统。“双模双环”控制结构克服了三环系统中位置环响应速度慢的固有缺点,试验证明具有很好的瞄准和稳定性能。

图7 “双模双环”炮控系统结构图Fig.7 Structure of double-mode and double-loopgun control system
2.3 数字化与网络化控制系统
传统的炮控系统采用基于分立元件的模拟/继电控制方式,存在器件离散性大、温漂严重、信息传输困难等问题。此外,模拟控制方式难以实现较为复杂的控制算法,2.1 节和2.2 节中的各种状态估计算法和现代控制方法的工程应用也依赖于炮控系统数字控制的实现,因此,数字控制是提高炮控系统性能和信息化程度的重要基础,也是控制系统的重要发展方向。
某新型数字全电式炮控系统结构如图8所示,系统在将各部件数字化的基础上,构建高速总线网络,完成部件之间的信息传输,实现实时网络控制,克服了传统炮控系统内部各部件之间由于信息传递关系复杂,造成线缆繁杂,易受电磁干扰等问题。此外,该系统还通过总线实现与电子综合系统的信息交互与信息共享,从而进一步提高火炮的反应速度、打击精度和信息化程度[1-5]。

图8 数字式炮控系统结构Fig.8 Structure of digital tank gun control system
但整体来看,目前炮控系统数字化控制的研究还主要集中在硬件设计与实现方面[29],数字控制系统中的许多理论研究和工程实践问题尚有待进一步深入。如控制算法与数字控制器及其外围部件的匹配性设计;现代控制策略在数字控制器中的一体化集成开发研究;控制系统的可测试性设计等。此外,系统网络中的总线结构缺乏统一的标准,总线网络的实时性、可靠性和冗余设计等研究也有待于进一步深入。
3 未来炮控系统发展趋势与技术途径
目前,炮控系统的研究背景一般是:敌我坦克的运动速度都在20~25 km/h 以内,且均为匀速运动。随着机动性能要求的提高和战斗激烈程度的增加,未来战场上敌我双方或一方的运动速度可能大于25 km/h,并且可能是非匀速运动,称之为高机动条件[30]。为了提高高机动条件下炮控系统的动态响应速度,实现快速随动和稳定,提高命中率,需要进一步改善动力系统的性能(如驱动功率、动力传动精度、功率变换效率等),同时开展炮控系统控制策略与智能化技术研究,促进炮控系统性能和智能化程度的进一步提升。
3.1 采用新型电机实现高精度无间隙传动
在目前的炮控系统中,动力传动机构存在着齿圈间隙等非线性因素,制约了炮控系统的性能提升。因此,需要研究高精度传动或无间隙传动的新型炮控系统,消除由机械传动装置带来的技术瓶颈问题。为此,可采用特种结构的新型电机,如水平向分系统采用大座圈多极对数空心永磁同步电机(如图9所示),其定子与车体固定,转子与炮塔固定,高低向采用直线电机(如图10 所示)直接驱动炮塔/火炮运动,从而取消以往炮控系统中的动力传动机构,可有效的抑制齿圈间隙的影响,使系统的性能,特别是低速运动性能有望得到大幅度提高。这种高精度无间隙传动方式还可推广应用到遥控武器站等系统中。

图9 座圈电机外形图Fig.9 Circle motor shape

图10 直线电机外形图Fig.10 Linear motor shape
3.2 采用软开关技术提高功率变换效率和电磁兼容性
随着车辆机动性能的提高和火炮口径与长度的增加,炮控系统处理、变换和控制的功率也越来越大,特别是在全电炮控系统中包含了多种大功率变换装置,如升压变换装置、逆变器等,这些装置普遍存在着功率变换效率低等问题,且对车内其它电气电子装置构成了潜在的电磁干扰威胁,影响了其功能的正常发挥。
采用“软开关”技术实现功率变换和控制,可以提高系统效率,并消除大功率变换过程中的电磁干扰。图11 为采用“软开关”技术的升压装置推挽正激电路拓扑结构,该拓扑在图3中推挽变压器副边增加辅助谐振电路,实现主开关管零电流关断。同时,该拓扑还在原边绕组的同名端之间增加钳位电容,实现开关管关断尖峰电压的无损吸收,具有抑制推挽变压器偏磁、减小输入电流波动等优点。
此外,针对图2中的SVPWM 驱动控制结构,采用最大零矢量脉宽调制(MPWZV-SVPWM)等技术,也可有效提高系统驱动效率和电磁兼容性。
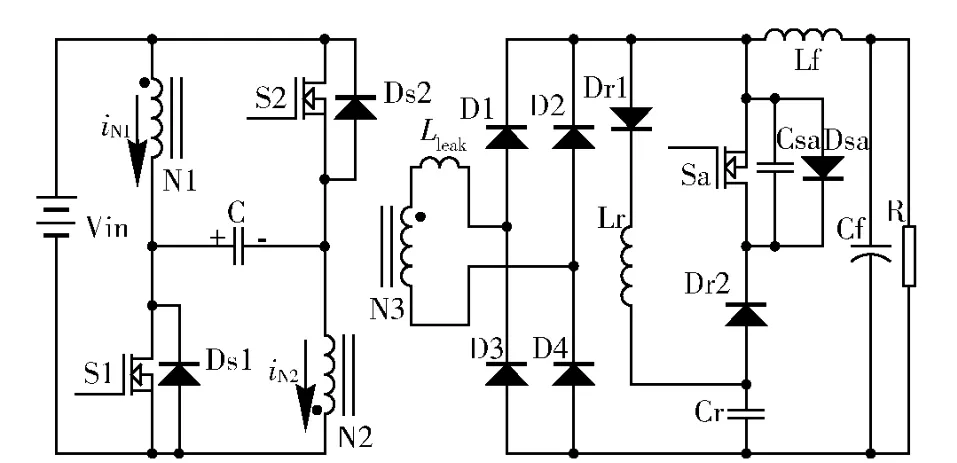
图11 基于“软开关”的推挽变换拓扑结构Fig.11 Topology of push-pull forward device based on soft-switching technique
3.3 炮控系统控制策略与智能化技术研究
随着未来战场需求的不断变化,坦克炮控系统需要具有在各种复杂路面、高机动条件下对远程目标实施快速打击的能力。这就对系统的稳定精度、反应速度和抗扰能力等指标提出了更高的要求。针对炮控系统强非线性、快时变性和高性能要求等特点,应用现代先进的控制理论、方法和手段进一步开展炮控系统控制策略与智能化技术研究,实现炮控系统自动测试、辨识、调整与智能化控制,提高炮控系统性能和智能化程度。其研究内容包括:
1)炮控系统非线性建模与扰动谱分析。分析路面振动干扰力矩谱,建立包含路面扰动和系统内部各种非线性因素的炮控系统模型,分析系统运行过程中各部件和环节因环境变化、磨损和非确定因素作用造成系统参数变化。分析和确定系统性能指标,建立模型控制结构和参数与性能指标之间的关系,为控制策略研究提供理论依据。
2)控制结构和控制算法研究。综合运用状态估计、参数辨识等理论和方法手段,实时获取系统的状态变量和参数,并在此基础上开展非线性控制方法研究,实现对各种非线性因素影响的补偿与根据环境变化的控制结构自动调整。
3)炮控系统智能化技术研究。开展智能化炮控系统的体系结构、系统模式、模型辨识、信号处理、控制与优化、实现手段等方面的研究,进一步提高炮控系统的性能,推进装备的智能化进程。
3.4 炮控系统实体建模、联合仿真与半实物仿真技术研究
全电式炮控系统是一个复杂的机—电混合系统,采用传统的纯数值仿真难以精确的反映系统工作过程中内部各环节的运行情况及其对系统性能的影响,制约了炮控系统研制前期的分析论证(特别是性能指标分解)、动力传动装置设计和系统非线性控制策略的研究。
为了更精确、有效的反映炮控系统的运行状态,可采用多体系统动力学仿真软件RecurDyn(Recursive Dynamic)对炮控系统进行实体建模,建立车体、炮塔/火炮和传动装置(如方向机、丝杠等)的三维实体模型,并与MATLAB/Simulink 协同仿真,精确、形象的反映炮控系统的工作过程和性能指标。同时,针对影响炮控系统性能的关键因素,如路面对火炮/炮塔的干扰力矩谱、齿圈间隙、摩擦力矩等开展系统运动学和动力学仿真研究,为炮控系统分析、设计与控制算法研究提供可靠的平台。
此外,针对数值仿真实时性差,可信度较低等问题,建立基于dSPACE 的系统硬件仿真平台,并将其与RecurDyn 连接,构建半实物联合实时仿真平台,开展炮控系统体系结构和控制算法研究也是炮控系统研究的一个重要趋势。
4 结论
综上所述,本文从动力系统和控制系统两个方面综述近年来国内外数字全电式炮控系统的研究进展,包括:电机及其驱动装置、高压供电及其功率变换技术、动力传动装置、信息检测与状态估计、数字化与控制策略等。在此基础上,探讨了未来坦克炮控系统的发展趋势以及几种可行的技术途径,为新型炮控系统论证分析、研制设计以及现炮控系统改造升级等研究提供理论借鉴和技术参考。
在工程实践中,上述各部分研究是相互关联和影响的,因此在研究过程中,还需要加强系统的顶层设计,使各种技术协调发展,从而有效的提升炮控系统的整体性能。
References)
[1] 臧克茂,马晓军,李长兵.现代坦克炮控系统[M].北京:国防工业出版社,2007.ZANG Ke-mao,MA Xiao-jun,LI Chang-bing.Modern tank gun control system[M].Beijing:National Defense Industry Press,2007.(in Chinese)
[2] Jane's Information Group.MBTs and medium tanks(Jane's armour and artillery 2008—2009)[EB/OL].(2008-03-20)[2009-05-17].http:∥21.156.81.54.12800/info/index/tank.jsp.
[3] Jane's Information Group.Weapon and stabilization systems(Jane's armour and artillery upgrades 2005—2006)[EB/OL].(2005-07- 04)[2010- 04- 22].http:∥21.156.81.54.12800/info/index/weapon.jsp.
[4] 臧克茂,李立宇,李匡成.坦克炮采用全电交流控制系统的研究[J].兵工学报,2006,27(3):549-552.ZANG Ke-mao,LI Li-yu,LI Kuang-cheng.A study on A.C.allelectric tank gun control system[J].Acta Armamentarii,2006,27(3):549-552.(in Chinese)
[5] 朱志昆.坦克交流全电式炮控系统研究[D].北京:装甲兵工程学院,2006.ZHU Zhi-kun.Research on alternating current all-electrical tank gun control system[D].Beijing:Academy of Armored Force Engineering,2006.(in Chinese)
[6] XU Jun-feng,XU Ying-lei,XU Jian-ping,et al.A new control method for permanent magnet synchronous machines with observer[C]∥35th IEEE Power Electronics Specialists Conference.Aachen:2004.
[7] AN Qun-tao,SUN Li,ZHAO Ke.Adaptive on-line identification method for the parameters of permanent magnet synchronous motor[J].Transactions of China Electrotechnical Society,2008,23(6):31-36.
[8] 马晓军,闫之峰,魏曙光.一种特种车辆用升压电源的研制[J].电气自动化,2007,29(3):33-35.MA Xiao-jun,YAN Zhi-feng,WEI Shu-guang.Development of boosting inverter used in special vehicle[J].Electrical Automation,2007,29(3):33-35.(in Chinese)
[9] Olorunfemi Ojo,Innocet Ewean Davidson.PWM-VSI inverter-assisted stand-alone dual stator winding induction generator[J].IEEE Transactions on Industry Applications,2000,36(6):1604-1611.
[10] WANG Shan-ming,WANG Xiang-heng,Li Yi-xiang,et a1.Steady-state performance of synchronous generators with ac and dc stator connections considering saturation[J].IEEE Trans.Energy Conversion,2002,17(2):176-182.
[11] 可荣硕.装甲车辆双稳压异步发电系统研究[D].北京:装甲兵工程学院,2009.KE Rong-shuo.Research on dual voltage stabilized induction generator system for armored vehicle[D].Beijing:Academy of Armored Force Engineering,2009.(in Chinese)
[12] Nordin M,Gutman P O.A survey controlling mechanical system with backlash[J].Automatica,2002,38(10):1633-1649.
[13] Gebler D,Holtz J.Identification and compensation of gear backlash without output position sensor in high-precision servo system[C]∥Proceedings of the 24th Annual Conference of the IEEE.IEEE:1998.
[14] Theodossiades S,Natsiavas S.Non-linear dynamics of gear-pair systems with periodic stiffness and backlash[J].Journal of Sound and Vibration,2000,229(2):287-310.
[15] 袁东,马晓军,魏曙光,等.坦克炮控系统非线性建模与运动性能分析(Ⅱ)[J].火炮发射与控制学报,2011,31(2):30-34.YUAN Dong,MA Xiao-jun,WEI Shu-guang,et al.Modeling of nonlinearity and analysis on run performance for tank gun control system(Ⅱ)[J].Journal of Gun Launch & Control,2011,31(2):30-34.(in Chinese)
[16] 张金忠,王国辉,杨振军.基于少齿差传动的高精度方向机研究[J].装甲兵工程学院学报,2000,14(9):80-82.ZHANG Jin-zhong,WANG Guo-hui,YANG Zhen-jun.Study of high precision traversing mechanism under the condition of small teeth difference transmission[J].Journal of Academy of Armored Force Engineering,2000,14(9):80-82.(in Chinese)
[17] Gawronski W,Beech-Brandt J J,Ahlstrom H G,et al.Torquebias profile for improved tracking of the deep space network antennas[J].IEEE on Antennas & Propagation,2000,42(6):35-45.
[18] 赵国峰,陈庆伟,胡维礼.双电机驱动伺服系统齿隙非线性自适应控制[J].南京理工大学学报,2007,31(2):187-192.ZHAO Guo-feng,CHEN Qing-wei,HU Wei-li.Adaptive control of dual-motors driving servo system with backlash nonlinearity[J].Journal of Nanjing University of Science and Technology,2007,31(2):187-192.(in Chinese)
[19] 刘建佐,张成义,王向东.滚珠丝杠副空回程角研究[J].组合机床与自动化加工技术,2010,12(12):1-4.LIU Jian-zuo,ZHANG Cheng-yi,WANG Xiang-dong.Study on ball screws empty rotating angle[J].Modular Machine Tool &Automatic Manufacturing Technique,2010,12(12):1- 4.(in Chinese)
[20] Wang Limei,Lorenz R D.Rotor position estimation for permanent magnet synchronous motor using saliency-tracking self-sensing method[C]∥IEEE IAS Annual Meeting.Rome:IEEE,2000.
[21] 袁东,马晓军.坦克炮控系统非线性状态估计与参数辨识研究[J].兵工学报,2010,31(8):1020-1025.YUAN Dong,MA Xiao-jin.Research on nonlinearity state estimation and parameter identification of tank gun control system[J].Acta Armamentarii,2010,31(8):1020-1025.(in Chinese)
[22] 史力晨,王良曦,张兵志.坦克-火炮系统行驶间振动建模与仿真[J].兵工学报,2003,24(4):442-446.SHI Li-chen,WANG Liang-xi,ZHANG Bing-zhi.Modeling and simulation of a moving tank-gun system in vibration[J].Acta Armamentarii,2003,24(4):442-446.(in Chinese)
[23] 王红艳.坦克交流全电炮控系统鲁棒控制方法研究[D].北京:北京理工大学,2008.WANG Hong-yan.Research on robust control method for AC allelectrical tank gun control system[D].Beijing:Beijing Institute of Technology,2008.(in Chinese)
[24] 袁东,马晓军,冯亮.坦克炮控系统非线性补偿控制研究[J].系统仿真学报,2009,21(23):7564-7568.YUAN Dong,MA Xiao-jun,FENG Liang.Research on compensation control of nonlinearity in gun control system of tank[J].Journal of System Simulation,2009,21(23):7564-7568.(in Chinese)
[25] Gautam Kumar,Pradeep Y Tiwari,Vincent Marcopoli,et al.A study of a gun-turret assembly in an armored tank using model predictive control[C]∥Proceedings of 2009 American Control Conference.St.Louis:2009.
[26] MA Xiao-jun,FENG Liang,ZANG Ke-mao,et al.Model reference adaptive control for permanent magnet synchronous motor servo system[C]∥Proceedings of the 11th international conference on electrical machines and systems.Wuhan:2008.
[27] 冯亮,马晓军,李华.基于扩张状态观测器滤波的坦克炮控系统模型参考自适应控制[J].兵工学报,2009,30(10):1375-1381.FENG Liang,MA Xiao-jun,LI Hua.Method of model reference adaptive control for tank gun control system based on ESO filter[J].Acta Armamentarii,2009,30(10):1375- 1381.(in Chinese)
[28] 马晓军,李长兵,颜南明,等.双模炮控系统研究[J].火炮发射与控制学报,2003,23(3):25-28.MA Xiao-jun,LI Chang-bing,YAN Nan-ming,et al.Study on novel double mode gun control system[J].Journal of Gun Launch& Control,2003,23(3):25-28.(in Chinese)
[29] 廖自力,马晓军,臧克茂,等.坦克火炮控制技术发展概述[J].火炮发射与控制学报,2006,26(增刊):1-3.LIAO Zi-li,MA Xiao-jun,ZANG Ke-mao,et al.Summary of tank gun control technology development[J].Journal of Gun Launch & Control,2006,26(S):1-3.(in Chinese)
[30] 臧克茂.陆战平台全电化技术研究综述[J].装甲兵工程学院学报,2011,25(1):1-7.ZANG Ke-mao.Study on the all-electric technology of land warfare platform[J].Journal of Academy of Armored Force Engineering,2011,25(1):1-7.(in Chinese)