压电机敏结构嵌入式控制器的开发与验证❋
2012-02-19高守玮朱晓锦高志远黄全振
高守玮, 朱晓锦, 赵 苗, 高志远, 黄全振
(上海大学机电工程与自动化学院 上海,200072)
引 言
机敏结构内涵是将分布式传感 /驱动元件紧密集成或融合于基体结构,同时将结构与控制器综合起来,形成兼具控制功能与结构功能的一种主动结构。其主要功能之一是实现结构振动响应的主动监控,在航空航天领域获得了广泛深入的研究[1-2]。就机敏传感和机敏致动材料而言,由于压电 PZT材料存在正逆压电效应,具有低功耗、电操作、频带宽和易布置等特性,是构成压电机敏结构的最具代表性的机敏元件之一[3-4]。作为机敏结构研究核心内容之一的主动控制理论与实现技术,当前研究主要侧重于智能控制方法与策略,而技术实现环节较之于工程实际应用还存在很大差距。从目前机敏结构振动主动控制研究的试验环节和控制系统设计开发来看,试验平台硬件构建中主要使用了基于PC微机为核心的控制器,并辅之于测控板卡、信号放大调理、功率输出、数据分析等诸多仪器构成试验环境,如此众多且体积庞大的控制单元和仪器设备,很难构成实际系统应用于高性能航空航天器。由于测控系统构成机敏结构是具体实现的关键手段之一,因此其嵌入式小型化是其发展的必然趋势[5]。
笔者以压电机敏结构振动主动控制为研究背景,着重进行了一种基于 DSP和 ARM双核处理器的嵌入式控制器的设计与开发。DSP具有强大的数据处理与运算功能,具有速度快、实时性强等特点,而 ARM处理器具有多种类输入输出接口,中断控制能力强[6-7];因此,结合机敏结构测控单元特点并发挥两者特性,从而构建嵌入式控制器具有独特的优势。结合压电机敏柔性试验结构和自适应滤波前馈控制方法,使用所开发的嵌入式控制器进行了结构振动自适应控制验证。试验结果表明,嵌入式控制器相关技术性能和功能指标满足研究工作的需要,取得了良好的模型结构振动响应控制效果,并较好地满足了分布式测控的实时性与高速性要求。
1 设计背景与方案
当前主动减振机敏结构研究尚处于智能结构概念的前期形式,其基本构成原理如图1所示。

图1 具有振动主动控制功能的机敏结构组成
针对本研究所构建的压电机敏试验模型结构,图1中结构基体表面分布粘贴了压电 PZT传感和驱动元件,结构振动信息通过分布式传感 PZT转换为电压信号,经嵌入式控制器多路采集后依据控制算法进行处理并输出控制信号,后经功率放大器激励 PZT驱动网络,最终实现结构振动响应的分布式控制。
针对机敏结构振动主动控制的特点,嵌入式控制器设计过程主要考虑以下几个方面:
1)满足多输入多输出方式的分布测控要求,同时依据结构振动响应范围需要满足多量程输入要求;
2)具有多通道并行采集和 DA输出能力,满足实时测控的快速性要求;
3)具有强大的浮点运算能力,能将复杂的振动控制算法实时实现;
4)控制器能够脱离 PC机独立运行,重量较轻且体积较小;
5)具有良好的人机交互功能和界面;
6)具有海量数据存储能力,能将大量运算和试验结果予以保存;
7)具有高速通信能力和较为丰富的传输接口,以便依据需要将运算数据和试验结果进行传输,并方便试验过程演示和控制算法分析。
嵌入式控制器设计方案如下:系统由 ARM和DSP两个核心单元组成,以形成基于双核处理器的嵌入式测控平台。 ARM单元主要实现系统软硬件资源管理,包括图形化人机界面与参数设置、结构振动信号多路采集、向 DSP单元发送各种控制字、数据传输和实时保存等功能,并负责多种通信接口的操作。为完成上述复杂功能与操作,嵌入了实时操作系统uC/OS-II以实现多任务管理。DSP单元主要实现控制算法运行,包括密集型数据处理和高速性运算等操作,以及控制过程数据返回 ARM单元实现保存,并实时输出多路控制信号于功率放大器,通过激励 PZT驱动网络实现结构振动响应的分布式控制。为保证DSP和ARM单元之间快速数据交换,采用高速同步串行接口SSP作为 ARM与DSP通信接口。嵌入式控制器设计结构见图 2。
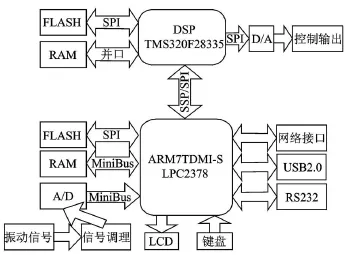
图2 嵌入式控制器结构框图
2 ARM处理器单元设计
ARM处理器单元选用了 NXP公司的 ARM7系列微控制器 LPC2378,它包含 10/100 Ethernet M AC,USB 2.0全速接口、4个 UART、2路 CAN通道、1个 SPI接口、2个同步串行端口(SSP)、3个 I2C接口、1个I2S接口、MiniBus、4个通用定时器、10位A/D转换器、RTC、看门狗和 104个通用 I/O管脚。ARM单元设计按功能主要包括信号调理电路、人机接口界面、数据存储与通信单元等。
2.1 信号调理电路
信号调理电路经电荷放大器实现压电 PZT传感元件多路结构振动信号采集和调理,设计能够实现32通道单端 /16通道差分输入,且满足双极性型±2.5,±5和±10 V的输入量程。考虑到兼容差分和单端输入要求,可以将一路差分信号作为两路单端信号输入,但为避免轮转采样延时造成采集信号差异,则 A/D至少具有两个采样保持器才能确保没有时延。具体选用 ADI公司的 AD7862-10芯片,其拥有两个快速 12bit ADC,输入电压量程为±10 V,且能够同时取样和转化,并具有输入过压保护功能。此外,将 32路采集通道分为 A/B两组,每组负责 16路通道的采集和调理,各组采集信号分别送入十六选一多路模拟开关,模拟开关选用 M AX公司的M AX306芯片,不仅具有通断电阻小和电压范围宽的特点,而且具有控制信号兼容 CMOS电平的优点;因此,选用两片 M AX306就可实现兼容 32路单端 /16路双端的信号采集通道切换。
信号调理电路A组通道设计见图3,信号MUXA首先经过单运放 U4跟随,多量程切换如下:
1)若是-2.5~+2.5 V量程,短接图 3中的VA1和 VB1,而 EA1断开,这样输入电阻为 5 k,反馈电阻为 20 k,实现 4倍放大至-10~+10 V;
2)若是-5~+5 V量程,短接图 3中的 VA1和VB1,同时 EA1也短接,这样输入电阻为 5 k,反馈电阻为 10 k,实现 2倍放大至-10~ +10 V;
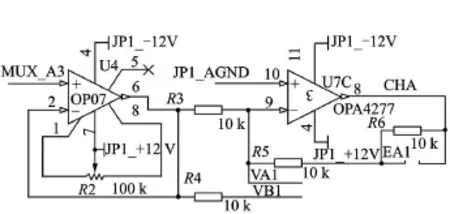
图3 信号调理电路
3)若是-10~+10V量程,断开图 3中的V A1和 VB1,同时 EA1短接,这样输入电阻为 10 k,反馈电阻也为10 k,仅进行反向而不作放大。
调理电路设计上,运算放大器的选择较为关键,单运放选用 OP07,四运放选择 OPA4277,经测试可以满足信号采集与调理需求,且它们还具有较低的输入失调电压、较大的共模抑制比等优点。
2.2 人机接口界面
人机接口界面包括液晶显示输出模块和键盘输入两部分。选用图形点阵式液晶LM320240,可以满足文字、波形、图片等数据信息显示要求,嵌入式控制器液晶显示测试效果如图 4所示。
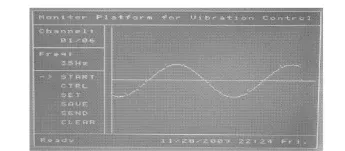
图4 嵌入式控制器液晶显示效果
键盘检测芯片选用 ZLG7289B,不仅具有非常方便的 SPI通信接口,还具备较宽的供电电压范围,很适合 5V/3.3V嵌入式测控单元开发的需要。
2.3 数据存储与通信功能
为存储控制过程的算法数据和试验结果数据,需要设计大容量存储器,具体选用一片串行 SPI接口的大容量 FLASH SST25VF016B芯片,它具有16Mbit的存储容量,能很好满足掉电存储数据的需要,且由于采用SPI接口,芯片只有8个管脚,大大减小了电路设计体积。
所设计的嵌入式控制器在结构振动控制试验完成后,为方便进行试验过程演示和控制算法分析,需要将运算数据和试验结果进行传输,为此设计了多种通信电路和传输方式。具体为:利用 LPC2378的UART控制器扩展了 RS232通信电路;利用一个兼容 USB2.0全速规范,并且支持 DMA传输的 USB设备控制器设计了 USB DEVICE接口电路;结合LPC2378内部集成的以太网媒体访问控制器,外扩的以太网物理层芯片 DM9161,以及网络变压器HR601860设计了以太网接口电路,满足了网络数据传输要求。
3 DSP处理器单元设计
DSP单元设计选用 TI公司 TM S320F28335芯片,其主频为 150M且支持浮点运算,指令周期最小为 6.67ns(150M Hz状态下),能很好满足复杂运算和实时处理的需要。
控制算法由 DSP单元进行运算,并实时产生控制数据经 D/A转换后输出,电路设计上数模转换芯片选用12位SPI接口的D/A转换器DAC7715,它采用±12 V双电源供电,因此不经调理可以直接输出±10 V的电压信号,避免了额外加入调理电路造成的校正问题。该芯片支持4路D/A同时输出,因此仅需4片芯片就可满足控制器16路控制输出端口的技术要求。此外,DAC7715芯片采用双缓存技术,具有LOADREG和 LOADDACS两个控制信号。前者为数据装载 DA的控制信号,后者能够控制模拟信号的输出时间。通过这种方式即可实现串行分时装载DA数据,同时又可无时延实现多路控制信号并行输出。
4 系统软件设计
4.1 ARM单元软件设计
ARM单元软件设计包括嵌入式实时操作系统、底层驱动程序和上层应用程序等。根据功能划分主要包括键盘输入任务、显示输出任务、同 DSP交换数据任务、串口通信任务、USB通信任务和网络通信任务等。总体任务关联图如图 5所示。

图5 ARM单元软件任务关联图
上述任务中,键盘属于事件触发任务,即当有键按下,ZLG7289B会产生一个下降沿中断,此时应将该中断和键盘任务直接关联,在中断服务程序(ISR)中通过信号量触发关联任务,完成发送命令字并将键值读回。对于显示任务,由于液晶属于低速设备,任务优先级设置一般较低,它通常是为多个任务所服务,所以需要为该任务分配一个消息队列来更新显示画面。 ARM单元与 DSP数据交换划分为关键任务,执行过程中必须尽可能与其他功能剥离,通过通信方式完成后续工作。网络和USB功能划分为数据处理任务,优先级一般较低,配合信号量和邮箱,实时完成数据传输。
4.2 DSP单元软件设计
DSP单元软件设计包括硬件系统初始化、控制算法执行程序、D/A控制输出、与 ARM通信接口等,软件设计流程如图 6所示。

图6 DSP软件设计流程图
4.3 通信接口与数据传输
ARM单元与 DSP单元的数据交互功能,是嵌入式控制的重要组成部分,设计上采用 ARM作为控制主机和 DSP充当协处理器的方式。为此,构建协议格式由以下 5部分组成:同步位(0x5A)、通信序列号(用于检测是否出现了丢包)、命令字 (区分不同功能)、数据域(根据命令字不同而不同)和校验(累加和校验)。命令字代码及功能描述如表1所示。
SPI是一个高速同步串行输入输出结构,它允许长度可编程串行位流(1~ 16位),以可编程的位传输速度移入或移出器件,也允许采用不同的时钟相位和极性。由于LPC2378和TMS320F28335均支持多种 SPI格式,只要设计双方通信格式与协议一致,即可完成数据传输功能;因此,设计上双方均采用 SPI CLK下降沿无延时方式,可以确保数据传输的一致性。

表1 命令字代码及描述
5 试验平台与验证
5.1 试验模型与平台
压电机敏试验模型结构基材选择环氧树脂板,主要参数为:弹性模量Ep=22 GPa,泊松比v=0.3,密度d=2 100 kg/m3,尺寸为 950 mm× 120 mm×2 mm。通过分布粘贴 PZT传感 /驱动元件构成,并以悬臂梁方式固定。悬臂梁根部粘贴一排 4片 PZT压电片作为结构激振器,尺寸为 50 mm×16 mm×1 mm;通过优化配置在模型结构上粘贴8个PZT压电片作为振动控制作动器,尺寸为 40 mm×8 mm×1 mm。粘贴2个PZT压电片作为结构振动检测传感器,尺寸为20 mm×6 mm×0.4 mm。构建完成的压电机敏柔性梁的前 4阶模态频率为:FREQ1=1.18 Hz,FREQ2=7.37 Hz,FREQ3=21.20 Hz,FREQ4=39.80 Hz。
试验平台主要由固定支撑架构、试验模型结构、嵌入式控制器、信号发生器、低通滤波器、示波器、功率放大器以及相关测控单元等组成,如图7所示。
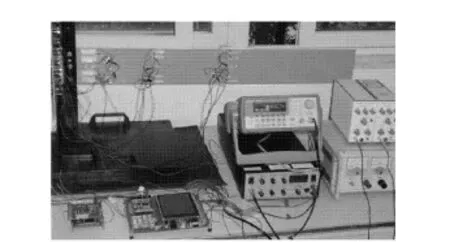
图7 试验模型结构与平台
5.2 试验验证与结果
基于所设计开发的嵌入式控制器,使用文献[8-10]所述的 FXLMS算法,结合试验平台进行了压电机敏柔性结构振动主动控制试验,具体控制过程如下。
采用 33220A信号发生器产生 7.37 Hz的正弦信号,并经宽频压电驱动功率放大器Model 7602放大至±200 V作为激振信号,施加于模型结构激振PZT,使结构持续振动。2路传感PZT感知结构振动信号,并经电荷放大器送入嵌入式控制器采集端口。控制器 ARM单元进行调理并由 SPI接口送入控制器DSP单元,开始进行FXLM S控制算法运算。同时生成控制数据经 DA转化为±10 V量程的控制信号,再经功率放大器成为±300 V激励控制信号,并施加于模型结构的 8路作动 PZT元件,以实现结构振动响应的自适应对消。
图8为未施加控制时,2路传感 PZT所测得的结构振动响应状况图。图9为施加控制作用后,2路传感 PZT所测得的结构振动响应状况图。对比图 8和图 9可见,基于嵌入式控制器施加控制算法取得了良好的结构抑振效果,较好地体现了控制器设计与开发的可行性和有效性。

图9 施加控制后结构振动响应状况
为验证嵌入式控制器能否取代 PC计算机控制系统,在所构建的试验平台上,使用数据采集卡、DA输出卡与高性能 PC计算机,开展对比控制试验,受控结构振动响应如图 10所示。可见,控制效果与使用嵌入式控制器基本相当,故嵌入式控制器可以取代基于PC计算机所构成的控制系统,并在本试验过程中进行压电机敏结构振动的实时主动控制。
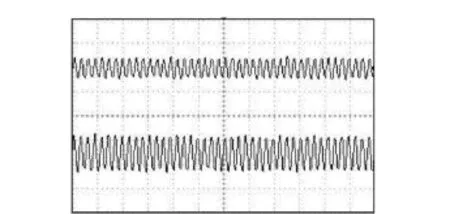
图10 PC计算机控制结构振动响应状况
6 结束语
主动减振机敏结构研究进程中,测控系统是必备的关键实现手段之一,相关测控装置的嵌入式设计与开发,对于该领域研究从基础研究层面向工程应用方向推进具有积极促进作用。笔者通过设计与开发一种基于DSP和 ARM双核处理器的嵌入式控制器,据此进行了积极的探索和有益的尝试,并通过构建试验平台和试验过程,验证了嵌入式控制器相关实现技术的有效性。设计开发的双核嵌入式控制系统由于做到了 DSP芯片算法处理功能的专用,为后续研究实现更复杂控制算法的操作提供了保证,同时针对测控系统的软件功能升级也具有良好的意义。
[1] 牟全臣,黄文虎,郑钢铁,等.航天结构主、被动一体化振动控制技术的研究现状和进展[J].应用力学学报,2001,18(3):1-7.
Mu Quanchen,Huang Wenhu,Zheng Gangtie,et al.Present work and developments of iIntegrated passive and active vibration control of aerospace structures[J].Chinese Journal of Applied Mechanics,2001,18(3):1-7.(in Chinese)
[2] 侯志伟,陈仁文,徐志伟,等.压电纤维复合材料在结构减振中的应用 [J].振动、测试与诊断,2010,30(1):51-54.
Hou Zhiwei,Chen Renwen,Xu Zhiwei,et al.Application of macro-fiber composite to structural vibration suppression[J].Journal of Vibration,Measurement&Diagnosis,2010,30(1):51-54.(in Chinese)
[3] Sethi V,Song G.M ultimodal vibration control of a flexible structure using piezoceramic sensor and actuator[J].Journal of Intelligent Material Systems and Structures,2008,19(5):573-582.
[4] 徐志伟,黄雪峰,沈星.基于 PT和 M FC的飞机垂直尾翼振动主动控制[J].南京航空航天大学学报,2008,40(3):313-318.
Xu Zhiwei,Huang Xuefeng,Shen Xing.Active vibration control of perpendicular empennage based on piezoelectric transformer and micro fiber composites[J].Journal of Nanjing University of Aeronautics&Astronautics,2008,40(3):313-318.(in Chinese)
[5] 朱晓锦,吴小军,李帆,等.基于双核处理器的机敏结构振动主动控制器设计 [J].计算机测量与控制,2010,18(2):366-369.
Zhu Xiaojin,Wu Xiaojun,Li Fan,et al.Design of active vibration controller of smart structures based on dual-core processor[J].Computer Measurement&Control,2010,18(2):366-369.(in Chinese)
[6] 陈亮,杜尚丰,王煦莹.基于 ARM9的数据采集器设计[J].仪器仪表学报,2006,27(6):118-119.
Chen Liang,Du Shangfeng,Wang Xuying.Design of datacollection implementbased on ARM9 [J].Chinese Journal of Scientific Instrument,2006,27(6):118-119.(in Chinese)
[7] 高培生,吴为麟,林震宇.基于 ARM和 DSP的实时谐波源定位仪研制 [J].仪器仪表学报,2007,28(11):2067-2071.
Gao Peisheng,Wu Weilin,Lin Zhenyu.Development of real-time harmonic source detector based on ARM and DSP[J].Chinese Journal of Scientific Instrument,2007,28(11):2067-2071.(in Chinese)
[8] Gupta A,Yandamuri S,Kuo S M.Active vibration control of a structure by implementing filtered-X LM S algorithm [J].Noise Control EngineeringJournal,2005,54(6):396-405.
[9] 邱志成.基于自适应滤波的压电智能挠性悬臂板振动控制研究 [J].系统仿真学报,2006,18(5):1311-1313,1318.
Qiu Zhicheng.Study on adaptive filter control for piezoelectric intelligent plate[J].Journal of System Simulation,2006,18(5): 1311-1313,1318.(in Chinese)
[10]Thomas J K,Lovstedt S P,Blotter J D.Eigenvalue equalization filtered-X algorithm for the multichannel active noise control of stationary and nonstationary signals[J].Acoustical Society of America,2008,123(6):4238-4249.