磁悬浮永磁直线电动机悬浮系统H∞鲁棒控制器的设计*
2012-02-05蓝益鹏张振兴
蓝益鹏,邱 超,张振兴
(沈阳工业大学电气学院,沈阳 110870)
磁悬浮永磁直线电动机悬浮系统H∞鲁棒控制器的设计*
蓝益鹏,邱 超,张振兴
(沈阳工业大学电气学院,沈阳 110870)
为消除直线电动机驱动的数控机床进给系统的摩擦阻力,实现无摩擦进给,采用一种新型的磁悬浮永磁直线同步电动机,将矢量控制分别应用于两套绕组可以实现推力与悬浮力的解耦,进而可以对电动机的悬浮子系统进行独立控制。针对悬浮子系统为非线性被控对象,以及存在不确定性未知扰动的特性,对悬浮系统数学模型进行输入输出解耦线性化,通过设计H∞鲁棒控制器来满足悬浮系统控制高精度,高鲁棒性的要求。仿真结果表明,该控制器能起到良好的抗干扰作用,系统的跟踪误差小,可以保持悬浮系统的稳定性。
磁悬浮永磁直线同步电动机;悬浮子系统;数控机床;输入输出解耦;H∞鲁棒控制器
0 引言
直线伺服进给技术在数控机床中的应用,消除了传统机械传动链带来的一系列不良影响,极大地提高了进给系统的快速反应能力和运动精度,然而数控机床加工中的摩擦阻力,特别是在低速时的非线性摩擦不可避免地影响伺服系统的精度,导致进给系统产生爬行以及造成反向死区。此外摩擦也是引起数控机床热变形的原因之一。因此,如何有效的减小或消除摩擦引起了普遍的关注[1]。
在此采用一种新型磁悬浮永磁直线同步电动机,以消除动子与导轨之间的摩擦,该直线电机在电机动子中放置有两套具有相同极对数的绕组,其中一套用于产生电磁推力;另一套用于产生磁悬浮力。通过控制悬浮绕组的电流,改变原有磁场在气隙中的分布,实现进给平台的稳定悬浮运行[2]。
应用矢量控制方法可以实现推力与悬浮力的解耦[3],从而可以对悬浮子系统进行独立控制,高精度高鲁棒性的悬浮控制是研究应用中需要重点解决的问题。本文在对悬浮系统数学模型进行输入输出解耦线性化后,通过设计H∞鲁棒控制器使悬浮控制系统具有良好的跟随性能和抗干扰性能[4],仿真结果表明该控制方法的有效性。
1 悬浮子系统的反馈线性化
对悬浮子系统采用i2q=0的控制策略,由磁悬浮永磁直线同步电动机电压方程、磁链方程、电磁力方程和动力学方程,可以得到电机磁悬浮子系统的数学模型[5-6]:
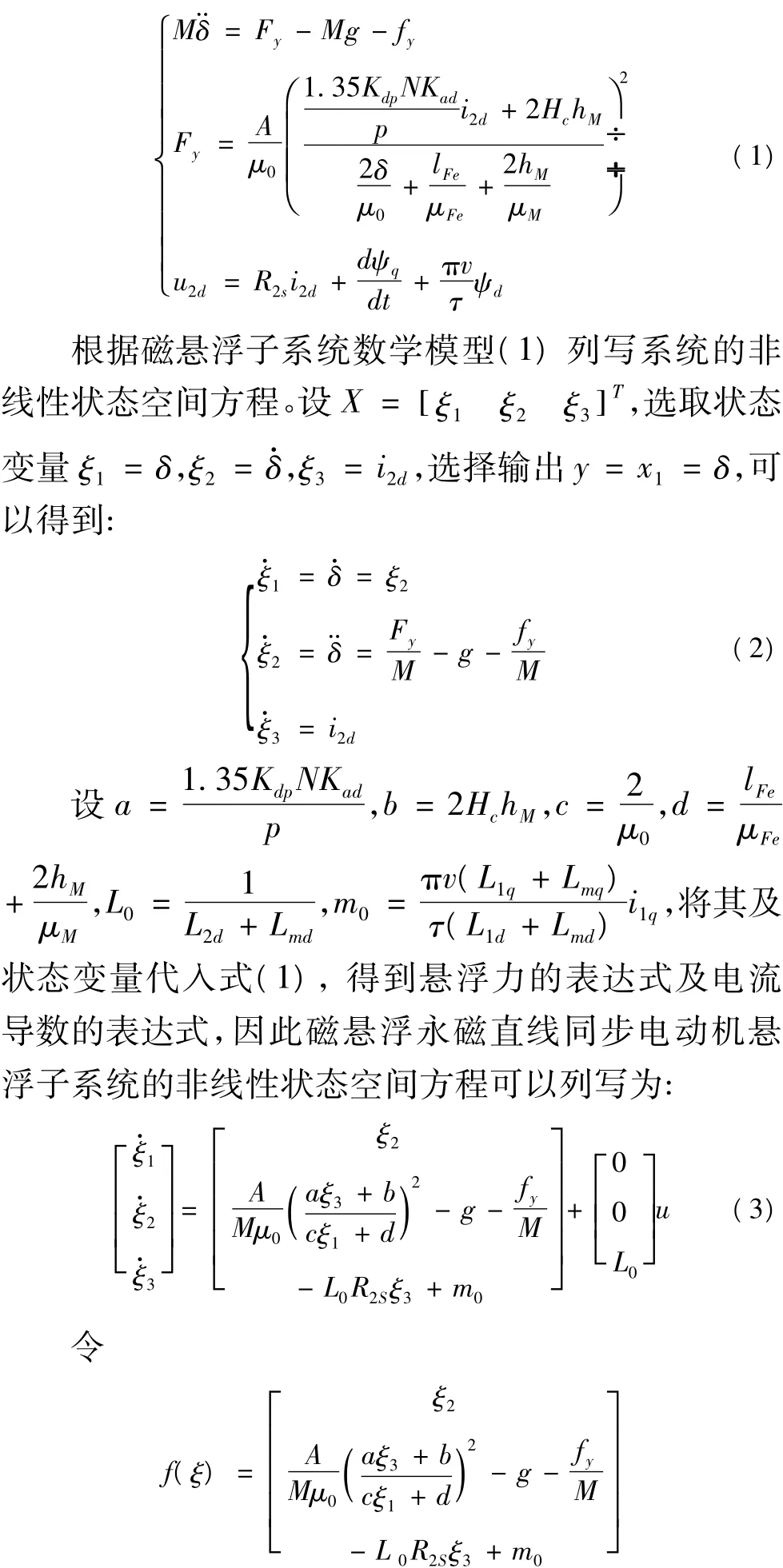
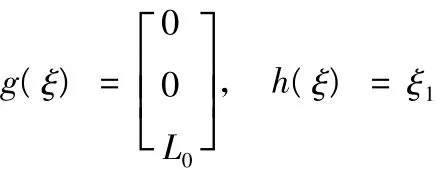
那么非线性状态空间方程(3)可以写成标准仿射非线性系统的形式

显然该系统为单输入、单输出的非线性系统。
对非线性状态空间方程(3)进行李导数计算,可以得到系统的相对阶γ=3,与系统的阶数相同,故可以应用输入输出解耦线性化方法对系统进行线性化处理[7-8]。

2 H∞鲁棒控制器设计
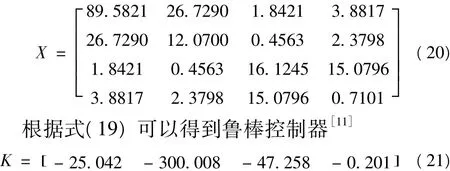
设计鲁棒控制器时,为了使系统对阶跃位置信号的跟踪误差渐进趋于零,引入一个积分环节。设x4为辅助状态变量,δ*为位置给定参考信号,与线性方程的被控对象一起构成增广对象。其为鲁棒H∞控制器[9]。系统的增广状态方程为

3 仿真分析
磁悬浮永磁直线同步电动机主要参数如下:M=50kg,L2d+Lmd=34.81mH,R2s=0.8955Ω,np=3,τ=33mm,fy=100N(在0.4s时加载),位置参考输入δ*=5mm,额定速度v=0.66m/s,推力绕组额定电流i1q=1.76A。
用Matlab对磁悬浮永磁直线同步电动机磁悬浮系统进行仿真,输入信号为5mm的阶跃信号,仿真结果如图 1,2,3 所示。

图1 悬浮高度曲线
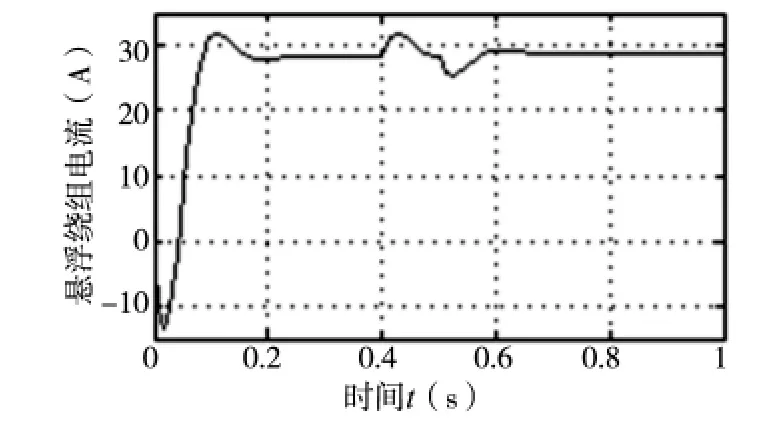
图2 电流曲线

图3 位置误差曲线
由图1悬浮高度曲线可知:悬浮高度迅速收敛于参考输入值δ*=5mm,系统上升时间和调节时间短,超调量小,表明系统具有良好的跟随性能。
在t=0.4s时,突加负载干扰fy=100N,图2,3分别为系统悬浮绕组电流曲线和高度误差曲线,由图可知扰动作用下系统恢复时间短,动态降落小,表明系统有较强的抑制扰动能力。
4 结论
针对数控机床直线电动机驱动系统中动子与静止导轨之间的摩擦问题,采用磁悬浮永磁直线同步电动机来实现无摩擦进给。对悬浮子系统数学模型进行输入输出解耦线性化后,通过设计H∞鲁棒控制器来满足悬浮系统控制高精度,高鲁棒性的要求。仿真结果验证了该控制器起到良好的抗干扰作用,系统的跟踪误差小,可以保持悬浮系统的稳定性。
[1]田录林,张靠社,王德意,等.永磁导轨悬浮和导向磁力研究[J].中国电机工程学报,2008,28(21):135-139.
[2]何凌云,佘龙华,赵春霞.磁浮列车悬浮系统的双环自抗扰控制[J].兵工自动化,2006,25(11):59-61.
[3]李勇,胡育文,黄文新,等.基于空间电压矢量调制的定子双绕组感应发电机系统电压控制技术[J].中国电机工程学报,2008,28(23):112 -118.
[4]黄雷,赵光宙,年珩,等.永磁型无轴承电机悬浮系统的H∞鲁棒控制[J].控制理论与应用,2008,25(4):711-716.
[5]蓝益鹏,赵辉,李成军.进给平台永磁直线磁悬浮电动机的电磁力特性研究[J].组合机床与自动化加工技术,2010(8):27-29.
[6]卢琴芬,叶云岳.混合励磁直线同步电机的磁场与推力[J].中国电机工程学报,2005,25(10):127 -130.
[7]蓝益鹏,杨波,张振兴.基于线性化解耦的永磁直线伺服系统H∞鲁棒控制器的设计[J].组合机床与自动化加工技术,2011(3):27-29.
[8]王丽梅,李兵.基于实时位置补偿直接驱动XY平台轮廓控制[J].沈阳工业大学学报,2011,33(1):9-13.
[9]张国柱,陈杰,李志平.基于复合自适应律的直线电机自适应鲁棒控制[J].控制理论与应用,2009,26(8):833-837.
[10]薛克安.鲁棒最优控制理论与应用[M].北京:科学出版,2008.
[11]Liu ZZ.Robust high speed and high precision linearmotor direct- drive,XY - table motion system[J].IEE Proceedings Control Theory and Applications.2004,151(2):166-173.
(编辑 赵蓉)
Design of H∞Robust Controller for Magnetic Suspension Permanent Magnet Linear Motor Suspension Subsystem
LAN Yi-peng,QIU Chao,ZHANG Zhen-xing
(School of Electrical Engineering,Shenyang University of Technology,Shenyang 110870,China)
In order to eliminate the friction of numerical controlmachine tool feed system driven by linear motor,a new magnetic suspension permanentmagnet linear synchronousmotor(PMLSM)is introduced in this paper.Vector control is applied to two sets of w indings and the thrustand the suspension force can achieve the decoupling.Then,themotor suspension subsystem can be controlled independently.It is difficult to control suspension subsystem of PMLSM because of the nonlinearity of the suspension subsystem model and uncertainty disturbances.In this paper,the nonlinear suspension subsystem is changed into a liner system w ith input-output decupling technique,and then anH∞robust controller is designed to meet high accuracy and high robustness control requirements.The result of simulation indicates that the suspension subsystem w ith this controller has a good performance for restraint disturbance and track of input signal.
magnetic suspension permanentmagnet linear synchronous motor;numerical control machine tool;suspension subsystem;input-output decoupling;H∞robust controller
TM383
A
1001-2265(2012)08-0066-04
2011-12-02
国家自然科学基金项目资助(50975181)
蓝益鹏(1962—),男,陕西华县人,沈阳工业大学电气工程学院副教授,硕士生导师,主要从事数控技术、鲁棒控制的研究,(E-mail)lanyipengg@163.com。