DJ型架桥机机臂水平自动检测系统的研究与应用
2012-01-27王增良
王增良
(邯郸中铁桥梁机械有限公司,河北邯郸 056003)
1 概述
DJ型架桥机运输、安装拆卸方便并对其小曲线、大坡度架梁具有良好的适应性,因此受到施工单位青睐,在我国铁路、公路重点建设项目普遍使用。2010年发生了2起架桥机倾覆事故。这2起事故,使用的架桥机结构形式相同、施工工况和事故原因类似,都是在桥面连续出现坡度变化的情况下,作业人员未及时调整0号柱支起的高度,使机臂过度倾斜超出安全范围而造成的责任事故。
截至目前,对架桥机机臂防倾斜问题已有了多项研究,并提出了钟摆式、红外线式、角度检测等方法来实现机臂防倾斜。有些方法应用效果不佳,抗干扰能力差,系统不稳定,人为因素影响大。本文介绍了机臂自动检测采用液位法实时检测,并采用Profibus DP通讯方式与主控可编程序控制器双CPU通信,该系统成功应用于DJ型公铁架桥机,实际应用表明该控制系统具有良好的抗干扰性,检测精度高,且应用性强,易于安装,应用前景广泛。
DJ型架桥机主要由0号柱、1号柱、2号柱、3号柱、机臂、曲梁、吊梁行车、机臂横移机构、1号柱横移轨道、2号柱横移轨道、电气和液压控制系统等组成,如图1所示。架桥机的控制部分采用了可编程序自动控制技术,在施工中各工序动作之间设置了互锁程序,可避免操作不当发生事故。
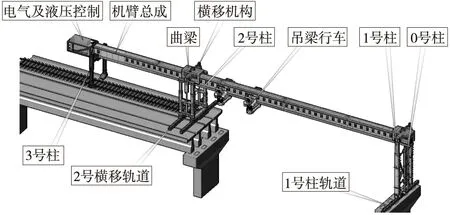
图1 架桥机结构组成
架桥机作业过程可分为吊梁作业和过孔作业。
1.1 吊梁作业
吊梁行车上的走行电机驱动齿轮与固定在机臂上的齿条啮合传动,实现吊梁行车沿机臂前后走行。1号柱和2号柱的走行机构可以实现桥梁全断面整机横向行走架梁。横移机构可以通过自身的横移油缸来实现机臂左右横移,满足边梁的安装就位。
1.2 过孔作业
吊梁完毕,2台吊梁行车分别与1号柱、2号柱曲梁销接。取消机臂与1号柱、2号柱曲梁销接,使吊梁行车与机臂能够做相对运动。1号柱、2号柱走行梁与各自横移轨道联接。主要过孔步骤如图2所示。

图2 过孔作业步骤
第一步:机臂和0号柱、3号柱前移。
收3号柱,用2个吊梁行车驱动系统驱动机臂前行7 m,支起3号柱。
第二步:2号柱前移。
收2号柱,后吊梁行车带2号柱连同横移轨道前行19 m支起。
第三步:机臂和0号柱、3号柱再次前移。
收3号柱,驱动机臂前行18.5 m,0号柱至前桥台,支起0号柱、3号柱。此时4个支柱全部支起,使整个机臂处于水平状态。
第四步:2号柱再次前移就位。
收2号柱,用后吊梁行车带动2号柱连同其横移轨道,前行21 m至已架梁末端支起。
第五步:1号柱前移就位。
收1号柱,用前吊梁行车带动1号柱连同其横移轨道,前行至前桥台支起。使整个机臂处于水平状态。机臂与1号柱、2号柱的曲梁销接,使架桥机构成稳定结构。取消2个吊梁行车与1号柱、2号柱销接后,将2个行车退至机臂后端;取消1号柱、2号柱与其横移轨道联接,使整机可以沿其横移轨道横向移动。过孔工序完成,架桥机处于待架梁状态。
过孔作业的第四步,即2号柱再次前移就位接近1号柱时,该作业状态是0号柱已经到达前桥台支起,应该说在0号柱即将达到前桥台时,悬臂最大,属于过孔工序中最危险状态。
1.3 机臂倾斜分析
2号柱移动前,结构受力及变形情况:2号柱收起悬空,此时0号柱、1号柱和3号柱起支撑作用。如果0号柱与1号柱高差较大,1号柱至0号柱之间的机臂呈倾斜状态,由此产生了较大的水平分力。此时,2号柱重力较大且靠近3号柱, 3号柱承受的压力较大。3号柱与桥面接触产生的摩擦阻力大于水平向前的作用力,此时架桥机结构保持稳定状态,随着2号柱前移,在接近1号柱时,稳定力矩逐渐减小,如果小于了倾覆力矩,重心移至倾覆区域;随着2号柱前移,3号柱承受的压力逐渐减小,即摩擦阻力逐渐减小。当摩擦阻力减至不能抵抗水平向前的作用力时,整机突然产生了纵向移动,0号柱和1号柱发生倾斜,结构支撑失稳,架桥机向前倾覆。
2 自动检测系统构成
为了避免由于机臂过度倾斜造成架桥机倾覆,本文讲述了一种架桥机机臂水平自动检测装置,它由信号发生及采集装置、信号检测和转换单元、可编程序控制器、显示报警装置组成。系统结构框图如图3所示。
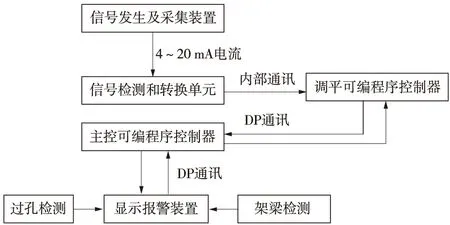
图3 系统结构框图
2.1 信号发生及采集装置
在架桥机机臂内设置3个检测点,分别在架桥机机臂前端、中部和尾部,每个检测点安装1个在机臂顶部吊挂的圆柱形水管,水管底部用塑料软管相连,当机臂倾斜时各点形成水平液位差,在每个圆柱型水管上方中心位置加装一超声波传感器检测液位变化。超声波传感器采用P+F UB1000型,其具有测量窗口可调,声锥宽度可调,同步功能和温度补偿等特性,精度值1 mm,2种不同声锥形状可选:宽声锥和窄声锥,响应特性曲线如图4所示,系统采用窄声锥以缩小圆柱型水管的直径。超声波传感器的检测液位值输出信号为模拟量信号,通过屏蔽双绞线传输到信号和接收转换单元内。
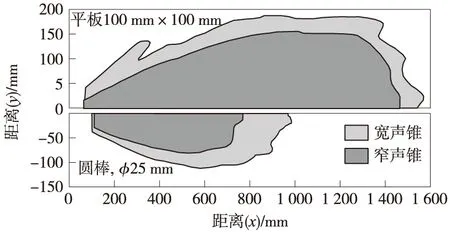
图4 响应特性
2.2 信号接收和转换单元
超声波传感器根据液位变化输出4~20 mA电流,可编程序控制器模拟量转换模块G7F-AD2A采集超声波传感器信号,将模拟量转换成数字量的I/O特性,如图5所示,转换成数字信号存储在可编程序控制器数字存储区,3个存储数值分别存储在3个数据单元内。
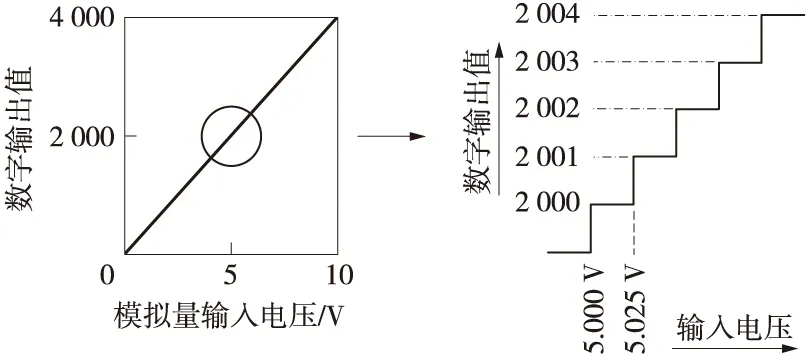
图5 I/O特性
2.3 可编程序控制器
其采用LS系列,将数字转换值进行差值运算,分别为0号柱相对1号柱高差,3号柱相对1号柱高差,将高差值进行存储。机臂水平自动检测系统可编程序控制器与架桥机主系统可编程序控制器采用用Profibus DP通讯方式,数字量点对点连接方式,以及双CPU通信方式,其中双CPU通信速度最快最可靠,但要求设备主系统与机臂调平系统采用同型号CPU。DP通讯和点对点方式可以和使用任何控制系统的设备相连,大大增强了本系统的适用性。
2.4 显示报警装置

图6 显示界面
显示报警装置选用台达AS38系列人机界面,其可与可编程序控制器进行读取并存储数据,可连接打印机将机臂水平差值打印出来,显示界面如图6所示,当水平差值超过危险值后人机界面发出音频警报,可编程序控制器停止行车移动命令输出直至将机臂水平值调整到安全范围。
3 系统功能
架桥机机臂水平报警分为2个工作状态,架梁工作状态和过孔工作状态;在架梁工作状态时,检测前端、中部和尾部的竖管液位差,当差值超过安全范围±70 mm,人机界面发出音频警报,当差值超过安全范围±100 mm,架桥行车走行动作不允许执行。过孔工作状态时,当0号柱在下一墩台支好,根据前端水柱、中部水柱、尾部水柱之间液位差进行调整,0号柱处与1号柱处机臂高差范围-50~+150 mm,即0号柱可比1号柱低50 mm或高150 mm,3号柱与1号柱处机臂高差范围0~+100 mm,即3号柱可比1号柱高100 mm时人机界面发出音频警报,架桥动作不允许执行过孔作业,只有调整0号柱、3号柱的高度,将液位差调整到安全范围以内才可以进行过孔动作。机臂调平系统误差为≤10 mm。
4 数据通讯
在该系统中,人机界面、调平可编程序控制器和主控可编程序控制器之间数据传输采用基于PROFIBUS-DP现场总线技术,利用其开放性,可方便快捷地进行自动化系统通讯,PROFIBUS-DP现场总线通讯速率为19.2 K~12 Mbp/s,通讯数据包为244字节,故其传输速度快、数据量大等优点,极大地满足了现场需要。
在该系统的数据传输中,主控可编程序控制器利用PROFIBUS-DP现场总线通讯采集调平可编程序控制器的数据,人机界面利用PROFIBUS-DP现场总线通讯采集主控可编程序控制器的数据,准确无误的显示机臂水平差值,系统反映速度快。在架梁过孔时,操作人员选择人机界面上的过孔检测或架梁检测按钮即可控制当水平差值超限时,人机界面利用PROFIBUS-DP现场总线通讯迅速向主控可编程序控制器发送禁止行车动作命令,主控可编程序控制器停止行车动作命令输出。
5 结语
本文对DJ型架桥机机臂水平自动检测进行了研究,通过采用液位法和可编程序控制器通讯控制开发了DJ型架桥机机臂水平自动检测系统,实现了架桥机架梁和过孔自动检测机臂水平差值并具有报警和禁止动作功能。架桥机在遇到高桥台、坡度连续变化架梁时,人工检测机臂水平及其不便且测量精度易受干扰,架桥机架梁过孔时容易发生倾斜造成事故。通过在多套该机型架桥机中的实践应用证明,该系统为操作人员提供了精确可靠的数据且系统具有超出安全值报警和禁止动作的功能,提高了架梁过孔效率,减轻了操作人员劳动强度,系统配置灵活,可靠,安装方便,有效地防止了架桥机安全事故的发生。
[1] 裘为章.实用起重机电气技术手册[M].北京: 机械工业出版社,2002.
[2] 中国国家标准化委员会.GB6067—2010 起重机械安全规程[S].北京:机械工业出版社,2010.
[3] 中华人民共和国铁道部.TB10213—99 铁路架桥机架梁规程[S].北京:中国铁道出版社,1999.
[4] 邯郸中铁桥梁机械制造有限公司.DJ型168公铁两用架桥机使用、维护及保养手册[Z].邯郸:邯郸中铁桥梁机械制造有限公司,2011.
[5] 刘振廷.传感器原理及应用[M].西安:西安电子科技大学出版社,2011.
[6] 廖常初PLC的编程方法与工业应用[M]. 重庆:重庆大学出版社,2001.
[7] 廖常初.PLC编程及应用[M].北京:机械工业出版社,2002.
[8] 徐世许.可编程序控制器原理和应用网络[M].2版.合肥:中国科学技术大学出版社,2008.
[9] 钟肇新.可编程序控制器原理及应用[M].广州:华南理工大学出版社,1992.
