基于模糊逻辑的冷、热交替治疗仪控制方法设计
2012-01-26宋明扬蔡张浩白景峰孙建奇
【作 者】宋明扬,蔡张浩,白景峰,孙建奇*
上海交通大学生物医学工程学院和MED-X研究院,上海,200030
0 引言
热或冷可以作为一种肿瘤治疗的辅助方法,也可以作为单独的肿瘤的疗法。冷冻疗法是利用液氮或氩作为冷冻剂,通常直接用于肿瘤的治疗,可以造成肿瘤细胞损伤和血管损伤,并且可能激发机体的免疫响应[1]。热疗同样在临床上用于肿瘤治疗,高温可以通过改变细胞膜的流动性、细胞骨架、膜蛋白的结构、细胞核的结构以及阻断DNA的复制来起到对肿瘤细胞的破坏作用[2]。然而,单冷和单热治疗存在潜在的问题:(1) 如果对肿瘤的杀伤不够彻底,肿瘤容易复发;(2) 治疗时可能会破坏肿瘤外围的正常组织。近年来的研究表明,冷热结合的治疗方法可以显著地提高对肿瘤组织的破坏作用,并且能防止肿瘤外围的正常组织被破坏。1982年,Gage首先发现相对于单冷和单热治疗,冷热结合的方法可以造成更大的破坏作用[3]。2004年,Hines-Peralta证实,相对于单独使用射频消融和冷冻治疗,同时使用两者可以产生更大的治疗作用[4]。最近,Takahashi研究发现,冷疗复温后立即施加以高温治疗,可以增强对肿瘤组织的杀伤效果[5],而单独的冷、热治疗的杀伤效果欠佳[6]。此外,冷热交替疗法可以激发机体的抗肿瘤免疫,从而阻止肿瘤的复发和转移。Dong和其他人的研究表明,冷热治疗后的肿瘤组织可以吸引更多的免疫细胞,如CD4+和CD8+T 细胞等[7]、[1]。
为了使冷热疗法实用化,本实验室设计了一套冷热治疗系统。它利用液氮和射频达到快速制冷和升温的效果[8]。然而,该设备需要有一套合理的控制系统,以达到良好的治疗效果。控制系统的主要功能是:快速升、降温,抑制温度过冲,有较高的稳态精度。
本文提出的一套用于冷热治疗系统,基于模糊控制器和模糊逻辑PID控制器,实现冷、热疗过程的精确控温。离体组织实验证明,所提出的方法能实现冷热治疗过程的控制。
1 冷热治疗系统介绍
冷热治疗系统的结构图如图1所示,由控制模块,数据采集模块,射频发生器和冷疗模块4部分构成。治疗参数如温度、射频功率、组织阻抗、液氮的流通情况(电磁阀的开闭状态)等,由数据采集模块实时监控。冷疗和热疗由同一根探针完成,治疗中不需要更换探针。
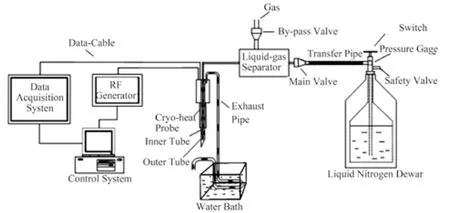
图1 冷热治疗系统结构图Fig.1 Sketch of the new thermal treatment system
2 冷热治疗系统的控制方法
该冷热治疗系统可以同时或者交替的进行冷热治疗,但冷、热疗的结合加大了对其控制的难度。单独使用射频经常使针壁周围的组织失水碳化,抑制射频电流向远端分布,从而导致消融范围小。此外,碳化导致的组织高阻抗可能会造成射频发射器硬件设备的损坏。为了解决这个问题,可以往探针管道内通以冰水,以冷却探针及其周围组织[9]。在冷热治疗系统中,低温的气、液两相氮被用来冷却探针。此外,治疗过程中,该系统必须提供良好的温度控制性能。
在治疗过程中,冷热探针插入肿瘤内部,肿瘤边缘插入一个热电偶,以检测边缘温度。利用通液氮的探针实现快速降温,待肿瘤边缘到达目标温度0oC后,保持10 min左右。冷疗结束后,让肿瘤自然复温至10oC以上,然后利用射频加热模块使肿瘤组织升温,直到肿瘤边缘温度到达目标温度42oC,在此温度保持约20 min。最后,在拔出探针前加大射频功率,以对针道周围组织进行灼伤,防止针道感染。
为了实现精确控温,在下文中分别介绍了冷疗的模糊逻辑控制器和热疗的模糊逻辑PID控制器的设计。
2.1 冷疗的模糊逻辑控制器设计
冷疗时,肿瘤边缘的温度变化,受液氮流速、肿瘤大小和肿瘤位置等多个因素共同影响。因为这些因素对温度的影响是复杂且非线性的,传统的阈值法或线性法不能实现消融过程中温度的精确控制[10-11]。而模糊逻辑控制法设计简单,自适应能力强,具有良好的鲁棒性[12-13],被广泛的应用于工业领域[14-15],在这里,我们将其用于冷治疗系统的控制。
温度参数由插在肿瘤边缘的热电偶测得。治疗过程中液氮罐压力保持不变,即可忽略液氮流速的影响,故模糊控制器的输入参数为:肿瘤类型、肿瘤大小、温度误差e(t)和误差变化Δe(t)。其中,温度误差e(t)为肿瘤边缘的当前温度和目标温度之间的差值。输出变量为主、旁通电磁阀的开闭状态。
为了简化设计,“肿瘤类型”分肝脏、乳房;“肿瘤大小”分:very small、 small、 middle、 big和 very big五个等级。“肿瘤大小”的隶属函数如图2所示,故所设计的控制方法目前适用于直径小于3.5 cm的肿瘤。
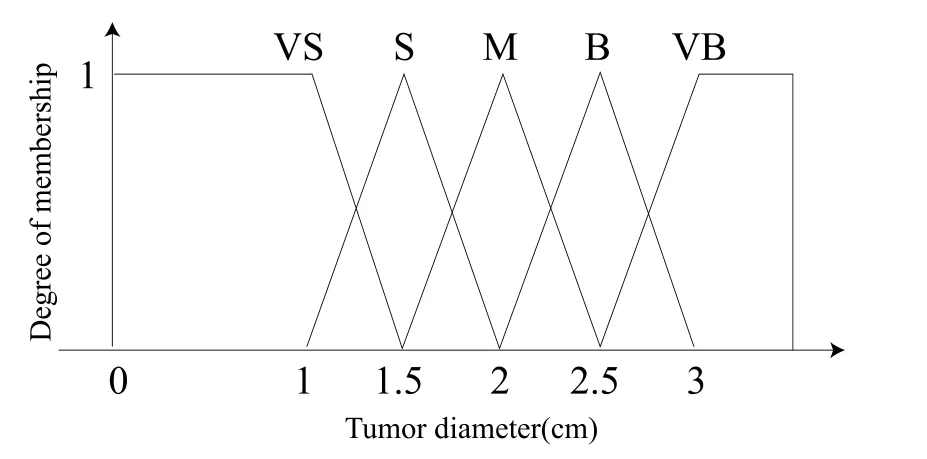
图2 “肿瘤大小”的隶属函数Fig.2 Membership function for the “tumor size”
e(t)和Δe(t)的隶属函数分别如图3和图4所示。在冷疗时,e(t)的隶属函数是非对称的,因为冷疗时射频发射器并不工作,冷疗后肿瘤组织通过与周围环境的热交换自然复温。
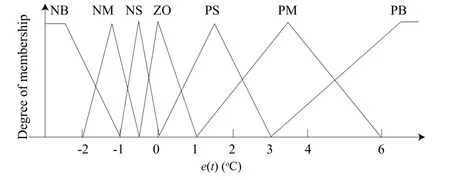
图3 冷疗时e (t) 的隶属函数Fig.3 Membership function for the e(t) in cryosurgery
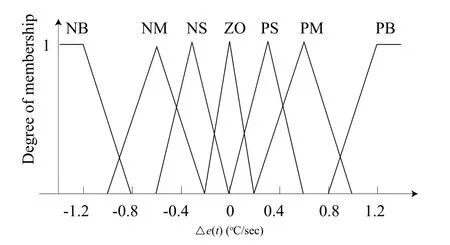
图4 冷疗时Δe (t)的隶属函数Fig.4 Membership function for Δe(t)in cryosurgery
在本文中,用到了12个模糊参数[12]:
NB: Negative Big
NM: Negative Medium
NS: Negative Small
ZO: Approximately Zero
PS: Positive Small
PM: Positive Medium
PB: Positive Big
VS: Very Small
S: Small
M: Medium
B: Big VB: Very Big
当需要快速降温时,如冷疗的初始阶段,同时打开主、旁通电磁阀。当肿瘤边缘温度接近目标温度是,降温速率应该减小,这时可以只打开主通电磁阀。
模糊规则中,“肿瘤类型”有2个变量,“肿瘤大小”有5个变量,e(t)和Δe(t)分别有7个变量,故模糊规则集中一共有490条,其中的一些规则如表1中所示。如Rule 66,当“Tumor type”为Liver和“Tumor size”为S,且e(t)和Δe(t)为 NS时,则关闭“Main valve”,且也关闭“By-pass valve”。
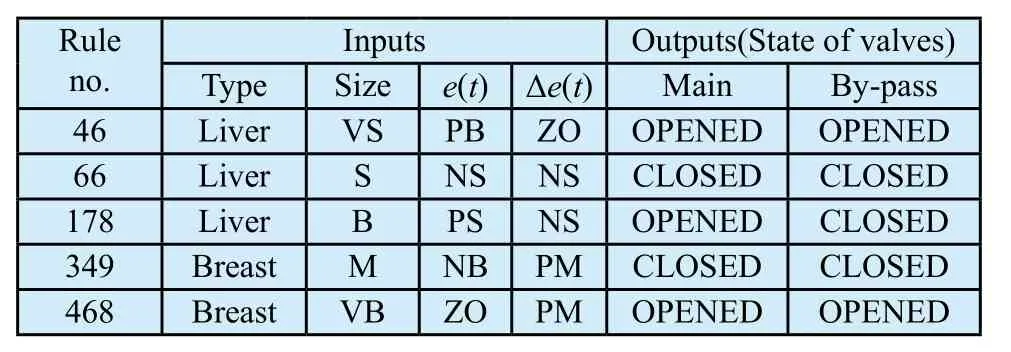
表1 冷疗温度控制的一些模糊规则Tab.1 Some fuzzy rules in cryosurgery treatment
2.2 热疗的模糊逻辑PID控制器设计
射频热疗时,影响肿瘤边缘温度的因素有:肿瘤类型、肿瘤大小、射频功率。由于PID控制器原理简单,便于理解和设计,同时具有良好的鲁棒性,故目前仍然应用于工业控制领域[16-17]。PID控制器中有三个关键参数:比例系数、积分系数和微分系数[18]。在模糊逻辑PID控制器中,用模糊逻辑的方法确定这三个参数。
本文为热疗过程的温度控制设计了模糊逻辑PID控制器(FLPID)。PID控制器的一个经典表达式为[19]:

其中,Kp、Ki,和Kd分别为比例系数、积分系数和微分系数;u(k)为占空比的变化量,用来调节射频发生器的输出功率;Ts为取样周期;e(k)为目标温度和当前温度的差值;Δe(t)为e(t)的变化率。
如图5所示,FLPID共包括两部分[20][21]。其中一个单元为模糊规则和推理模块,另外一个单元为PID控制器。在热疗过程中,输入为目标温度,输出为肿瘤边缘的实际温度。
“肿瘤大小”的隶属函数如图2所示,而热疗e(t)和Δe(t)的隶属函数分别如图6和图7所示。当肿瘤边缘的温度接近目标温度时,图6所示隶属函数的m4要“瘦”一些。关于Kp,Ki和Kd的隶属函数如图8所示。所有的隶属的函数都是根据经验设计并优化的,以求得到优异的性能[22-23]。
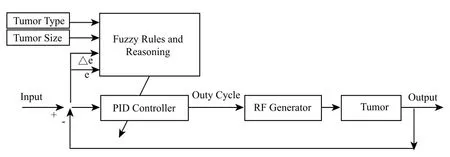
图5 用于热疗的模糊逻辑PID控制器的原理图Fig.5 Structure of fuzzy logic PID controller for hyperthermia treatment
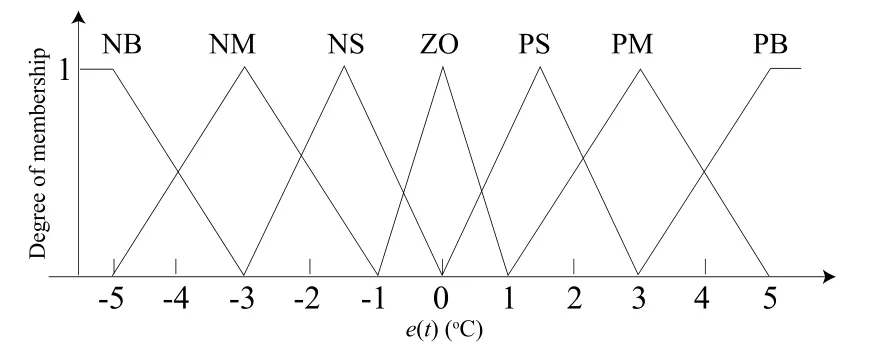
图6 热疗时e(t)的隶属函数Fig.6 Membership function for e(t) in hyperthermia treatment
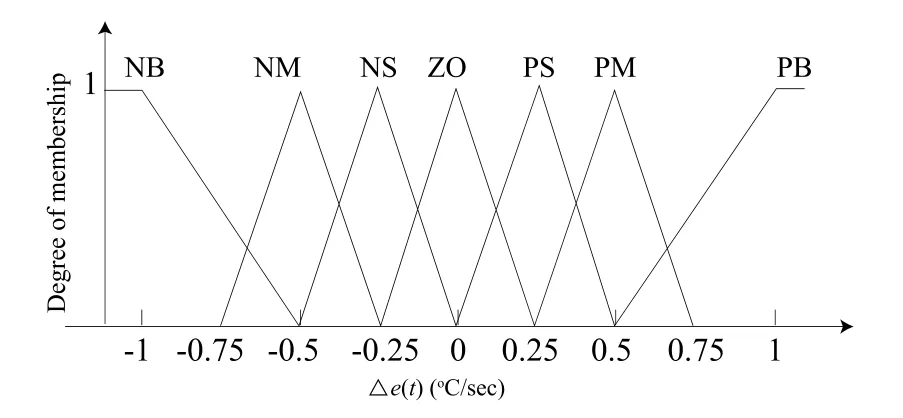
图7 热疗时Δe(t)的隶属函数Fig.7 Membership function forΔe(t)in hyperthermia treatment
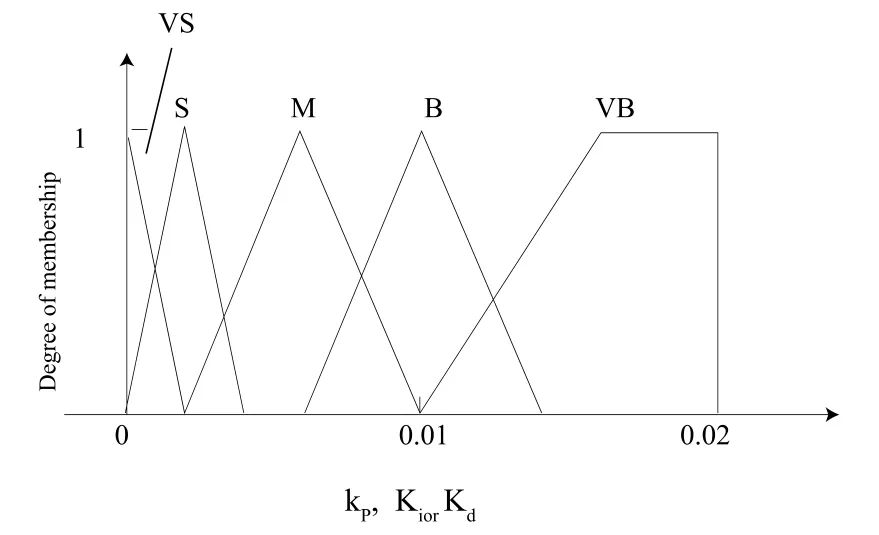
图8 热疗时Kp、Ki 和Kd 的隶属函数Fig.8 Membership function for Kp , Ki , and Kd in hyperthermia treatment
由于Kp、Ki和Kd对PID的控制起决定作用,而治疗不同阶段对控制的要求不同,故应该根据系统的反馈参数实时调整Kp、Ki和Kd的值,来得到满意的控制效果[24]。
一共有490条控制规则用于热疗。这些规则的制定基于以下原则:当肿瘤边缘温度远低于目标温度时,Kp的比重应该高于Ki和Kd,以得到较快的响应速度;当肿瘤边缘温度接近目标温度时,应该提高Kd的比重,降低Kp的比重,以使温度曲线平滑进入稳态,抑制超调量;当进入稳态后,应该调整Ki的比重,来消除或减小误差[25]。490条规则中的一些规则如表2所示。
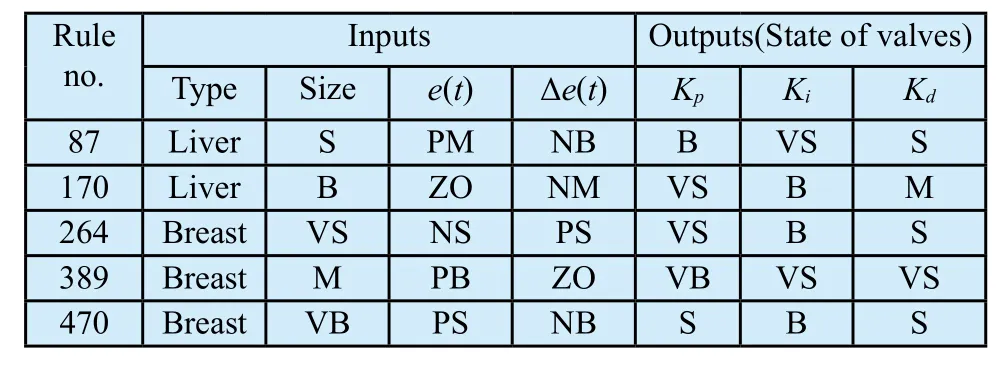
表2 热疗温度控制的一些模糊规则Tab.2 Some rules in hyperthermia treatment
尽管冷疗和热疗过程的温度控制方法是单独设计的,但是所设计的控制方法能够连续的用于整个冷热交替治疗过程中。
3 实验结果
为了检验所设计的控制方法是否可行,我们分别做了6次冷疗实验和9次热疗实验。实验材料为离体猪肝,治疗区域假设为肿瘤。这15次实验根据肿瘤的直径实验分为15 mm、20 mm和25 mm三组。实验中冷、热疗时肿瘤边缘的目标温度分别为0oC和42oC(这两个温度能够激发免疫响应),从而可抑制肿瘤的转移和复发[7]。初始温度为室温,室温在冷疗和热疗时分别保持恒定。每次实验中,当肿瘤边缘温度到达目标温度后,保持约10 min。实验结果如图9-11所示。
图9所示是冷疗过程中肿瘤边缘温度的变化曲线。实线、虚线和点划线分别表示15 mm、20 mm和25 mm直径大小肿瘤的温度曲线。随着肿瘤直径的增大,到达目标温度所经历的时间逐渐增大,而“最大偏移量” (到达目标温度后偏离目标温度的最大差值)则没有明显变化。造成这种现象的原因有两个:一是大肿瘤需要更多的冷剂量才能使温度下降同样的幅度;二是因为在稳态时只需要较少的冷剂量,就可以使温度维持在目标温度附近。因此,在稳态时不同大小的肿瘤温度变化情况差别不大。
图10表示的热疗过程中肿瘤边缘温度的变化曲线。总体而言,所提出的控制方法可以实现较小的超调量和较快的响应速度。“超调量”和“调整时间”(指从“初始时刻”到“误差开始小于1的时刻”的时间间隔)将会随着肿瘤直径的增大而增大,而到达目标温度的时间有可能随肿瘤直径的增大而减小,这是因为对于较大的肿瘤,治疗的初始阶段采用更大的射频功率,从而得到了比较小的肿瘤更快的响应速度(见图10中虚线)。在大部分实验中,肿瘤边缘的温度可以在3 min内由室温到达目标温度。如果室温改变,可以通过调整射频功率使到达目标温度所经历的时间保持在合理的范围内。此外,超调量的最大值约为2,且超调后误差逐渐减小。因此,可以证明所设计的控制方法具有良好的控制效果。
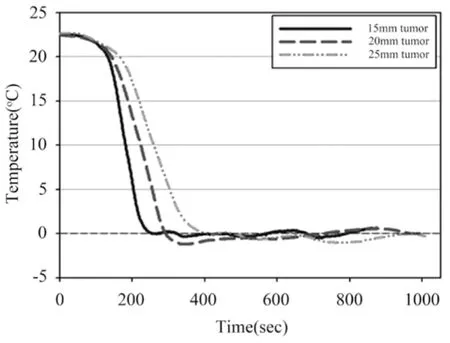
图9 冷疗时不同直径的肿瘤边缘温度情况Fig.9 Temperature of the edge of ablation region in cryosurgery treatment, the diameters of tumor are 15 mm, 20 mm, 25 mm
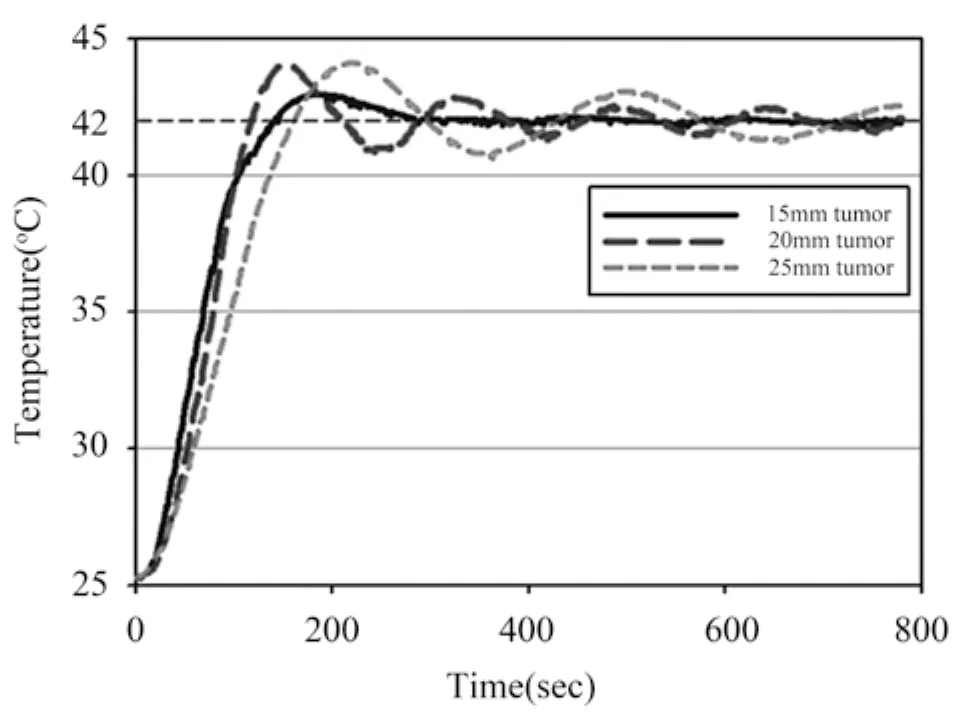
图10 热疗时不同直径的肿瘤边缘温度情况Fig.10 Temperature of the edge of ablation region in hyperthermia treatment, the diameters of tumor are 15 mm, 20 mm, 25 mm
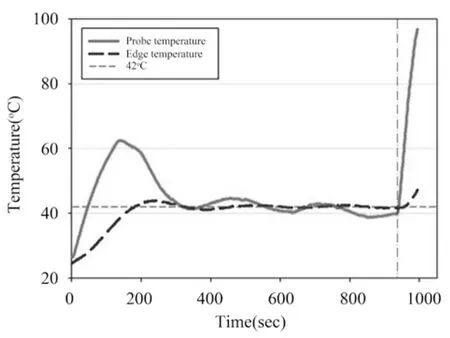
图11 热疗时针壁温度和肿瘤边缘温度Fig.11 Temperatures of the probe wall and the edge of ablation region in hyperthermia treatment
图11展示的是热疗时的针壁温度和肿瘤边缘温度,当边缘温度上升时,针壁温度也迅速上升;当边缘温度进入稳态时,针壁温度也趋于平稳。在治疗的最后阶段(竖虚线后),关闭探针保护功能,即同时关闭主、旁通电磁阀,可见针壁温度迅速上升,这说明所设计的探针冷却方法效果显著。
4 结果和讨论
本文为冷热治疗系统设计了一套温度控制方法。通过离体组织实验可以得出结论,所设计的控制方法在冷、热疗过程中均有良好的效果。
目前冷疗时的温度振荡的幅度较大,在接下来的研究中应该对此作进一步优化,如可以通过改进液氮输送装置或者精细化控制步长来实现。另外,不同大小和位置的肿瘤的传热性能不同,应通过不断优化控制参数,来进一步提高温度控制的精度。还可通过对冷、热疗时肿瘤的温度分布情况进行数模转换,实现治疗过程中的温度可视化。
[1] Ablin R J. An appreciation and realization of the concept of cryoimmunology[M]. Ablin RJPercutaneous prostate cryoablation,1st ed. St. Louis: Quality Medical Publishing, 1995, 136-154.
[2] Takahashi A, T ONISHI. The scientific aspects of hyperthermic cancer therapy[J]. biotherapy-tokyo, 2006, 20(6): 515-520.
[3] Gage A M, M Montes, et al. Destruction of hepatic and splenic tissue by freezing and heating[J]. Cryobiology, 1982, 19(2): 172-179.
[4] Hines-Peralta A, C Y Hollander, et al. Hybrid radiofrequency and cryoablation device: preliminary results in an animal model[J].Journal of vascular and interventional radiology, 2004, 15(10):1111-1120.
[5] Takahashi D, T Takahashi, et al. A Study for Cryosurgery-Hyperthermia Treatment System[J]. Journal of Power and Energy Systems, 2008, 2(5): 1294-1303.
[6] Rabin, Y., T. B. Julian, et al. Long-term follow-up post-cryosurgery in a sheep breast model[J]. Cryobiology, 1999, 39(1): 29-46.
[7] Dong, J, P. Liu. Immunological response induced by alternated cooling and heating of breast tumor[J]. Engineering in Medicine and Biology Society, 2007, 1491 – 1494.
[8] Sun, J., A. Zhang. Evaluation of alternate cooling and heating for tumor treatment. international[J]. Journal of Heat and Mass Transfer, 2008, 51(23-24): 5478-5485.
[9] Bai J, X Fu. Power controlling strategy for cryosurgery & RF alternating thermal therapy system[J]. Information Technology and Applications in Biomedicine, 2008, 600–602.
[10] Ustun S V, M Demirtas. Optimal tuning of PI coef fi cients by using fuzzy-genetic for V/f controlled induction motor[J]. Expert Systems with Applications, 2008, 34(4): 2714-2720.
[11] Zhao Y, E. G. Collins Jr. Fuzzy PI control design for an industrial weigh belt feeder[J]. Fuzzy Systems, IEEE Transactions on 2003,11(3): 311-319.
[12] Li W, X Chang. Application of hybrid fuzzy logic proportional plus conventional integral-derivative controller to combustion control of stoker- fi red boilers[J]. Fuzzy sets and systems, 2000, 111(2): 267-284.
[13] Mirza M, H GholamHosseini, et al. A fuzzy logic-based system for anaesthesia monitoring[J]. Engineering in Medicine and Biology Society, 2010, 3974-3977.
[14] Mizumoto M. Realization of PID controls by fuzzy control methods[J]. Fuzzy sets and systems, 1995, 70(2-3): 171-182.
[15] Toscano R. A simple robust PI/PID controller design via numerical optimization approach[J]. Journal of Process Control, 2005, 15(1):81-88.
[16] Chopra S, R Mitra, et al. Auto tuning of fuzzy PI type controller using fuzzy logic[J]. International journal of computational cognition (http://www. ijcc. us), 2008, 6(1): 12-18.
[17] Lelic M, Z Gajic. A reference guide to PID controllers in the nineties[J]. Proc. IFAC Digital Control: Past, Present and Future,2000, 69-78.
[18] Zhao Z Y, M Tomizuka, et al. Fuzzy gain scheduling of PID controllers[J]. Systems, Man and Cybernetics, IEEE Transactions on, 1993 23(5): 1392-1398.
[19] Anderson K L, G L Blankenship, et al. A rule-based adaptive PID controller[J]. Decision and Control, 1988, 564-569
[20] Raju G, J Zhou. Adaptive hierarchical fuzzy controller[J]. Systems,Man and Cybernetics, IEEE Transactions on, 1993, 23(4): 973-980.[21] Zhao Y, E G Collins Jr. Fuzzy PI control design for an industrial weigh belt feeder[J]. Fuzzy Systems, IEEE Transactions on 2003,11(3): 311-319.
[22] Isik H, S. Arslan. The design of ultrasonic theraphy device via fuzzy logic[J]. Expert Systems with Applications. 2010, 38(6):7342-7348.
[23] Mirza M. H Gholam Hosseini, et al. A fuzzy logic-based system for anaesthesia monitoring[J]. Engineering in Medicine and Biology Society, 2010, 3974-3977.
[24] Zhuang M, D Atherton. Automatic tuning of optimum PID controllers[J]. Control Theory and Applications, IEE Proceedings D,1993, 216-224.
[25] Zheng L. A practical guide to tune of proportional and integral (PI)like fuzzy controllers[J]. Fuzzy Systems, 1992, 633–640.