神经外科手术导航系统中SW图谱的可视化研究
2012-01-26李星顾力栩
【作 者】李星,顾力栩*
上海交通大学生命科学与技术学院,上海,200240
上海交通大学生物医学工程学院,上海,200030
纸质脑图谱一直都是医生学习人体大脑内部组织结构和功能的重要工具,可以帮助认清大脑内部各个组织结构的位置以及相互间的毗邻关系,特别是那些不容易被直接看到的大脑内部的组织结构。近年来,人们开始在原有纸质图谱的基础上研究可视化脑图谱,已成为国内外脑神经科学研究的一个热点。脑图谱的可视化正成为神经外科手术导航系统中一项关键技术,在对病灶的定位和手术计划上有着重要的作用。
目前对脑图谱的可视化研究大部分都是Talairach-Tournoux图谱[1]。国内首都医科大学的罗述谦教授[2]对脑图谱作了一些基础性的研究工作,基本上都是基于MRI图像和Talairach -Tournoux脑图谱的。上海交通大学的裴巍在神经外科解剖图谱的可视化应用[3]研究中用的也是Talairach –Tournoux图谱。国内研究Schaltenbrand-Wahren图谱的不多,将二维SW图谱立体彩色显示的成果更少。基于以上研究的背景需求,本文分析并实现了神经外科手术导航系统中SW解剖图谱的三维可视化,并能够在系统中实时显示感兴趣解剖结构的名称。
1 背景知识
1.1 SW图谱
Schaltenbrand-Wahren脑图谱[4]通常简称为SW图谱(图1所示),是关于两个白种人人脑标本三个半球的丘脑基底神经节部分的图谱,源于分别在横断面、冠状面和矢状面3个不同方向上做连续切片分割后数据采集的结果,切片厚度范围在1 mm-4 mm之间不等。其中,矢状面和横断面方向的图谱来源于同一个脑标本的左右半球,而冠状面方向的图谱来源于另一个脑标本半球[5]。
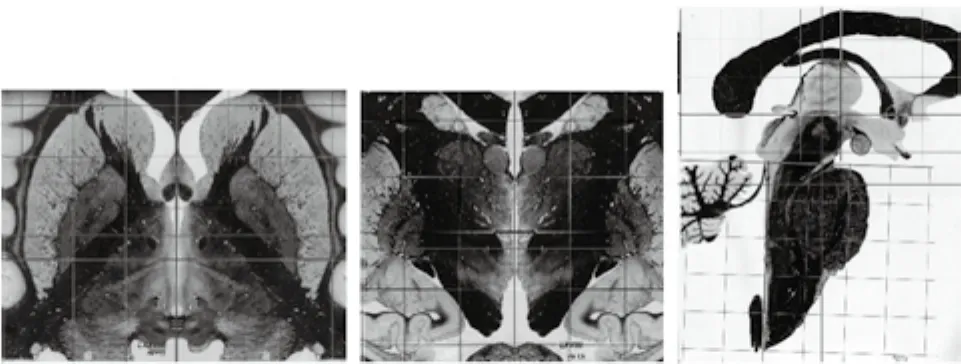
图 1 Schaltenbrand-Wahren脑图谱在轴状面、冠状面和矢状面三个方向的截面图Fig.1 three directions - Axial, Coronal, Sagittal view of Schaltenbrand-Wahren brain atlas
该图谱由于采用了两个人脑标本的三个半球来做切片,而在冠状面方向的图谱准确可靠,在横断面和矢状面方向的图谱定位准确性较差,所以将三个方向的图谱进行三维可视化后会发现在个别地方三者的重合有些出入。但是SW图谱是基于丘脑基底节神经部位的功能性图谱,图谱中的结构均位于大脑的中心部位,与人体的各种机制休戚相关,起着十分重要的作用。
1.2 神经外科手术导航
神经外科手术导航是将大脑的图像信息可视化后,与手术中病人的解剖结构进行对应,手术中跟踪手术器械的路径,将手术器械的运动在病人影像上以虚拟手术器械的形式实时显示,使医生能对手术器械相对病人解剖结构的位置一目了然,从而达到缩短手术时间和提高手术质量目的的一种新技术手段。不仅如此,由于可以事先在术前可视化的图像上依照确定的病灶位置计划好手术路径,做好熟前计划、术中导航和术后评价[6],所以,图像引导下的神经外科手术极大地减小了手术的创伤面,最大限度地减轻了病人的痛苦。
大脑图像信息可以是术前或术中CT、MRI等医学影像设备提供的CT、MRI影像信息,也可以是电子化的脑图谱,如TT图谱和SW图谱。本文中将SW图谱在神经外科手术导航系统中可视化显示并能实时进行解剖结构的标识,这不仅是医疗领域脑科学教学的需要,也是脑外科手术中提高成功率和缩短手术时间的迫切要求。
2 研究方法
2.1 图谱数字化
我们用来作为本研究的标准图谱是纸质SW图谱,通过扫描、数字化和进行最近邻插值后生成立体的标准SW图谱(见表1)。
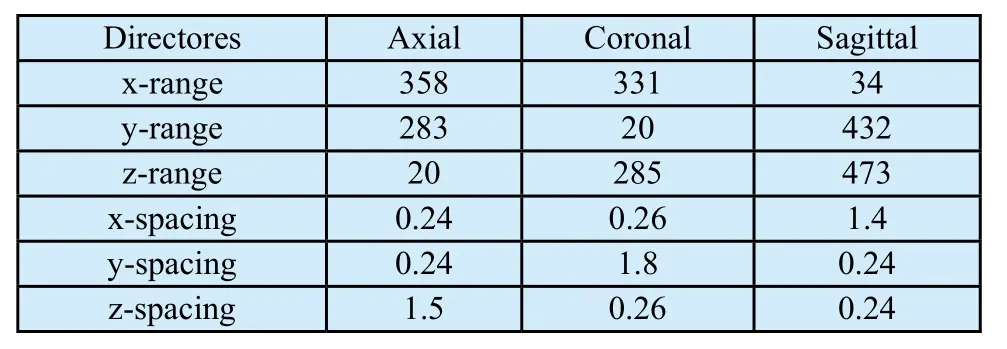
表1 标准SW图谱Tab.1 Standard SW atlas
在纸质标准SW图谱的基础上,我们通过医生将横断面、冠状面和矢状面三个方向上的近600个结构手动分割出来,采样获取每个结构在不同层上的多个轮廓坐标点信息,记录下解剖名称。这些不同结构在不同方向不同层上的多个轮廓坐标点信息,构成了我们原始的点数据。
由于SW脑图谱的原始点数据是通过采集标准SW脑图谱内组织结构的轮廓而得到的点数据,零散且不连续,因此我们需要利用样条插值的方法将原始点数据连成轮廓曲线。样条插值是医学图像处理中常用的一种插值方法。
本文采取Cardinal样条插值。Cardinal样条曲线是插值分段样条三次曲线的一种,并且每条曲线的端点位置均指定切线。一个Cardinal样条完全由四个连续的控制点Pk-1PkPk+1Pk+2给出。P(u)设是两控制点Pk和 Pk+1间的参数3次函数式,则从Pk-1到Pk+1间的四个控制点用于建立Cardinal样条段的边界条件(1):
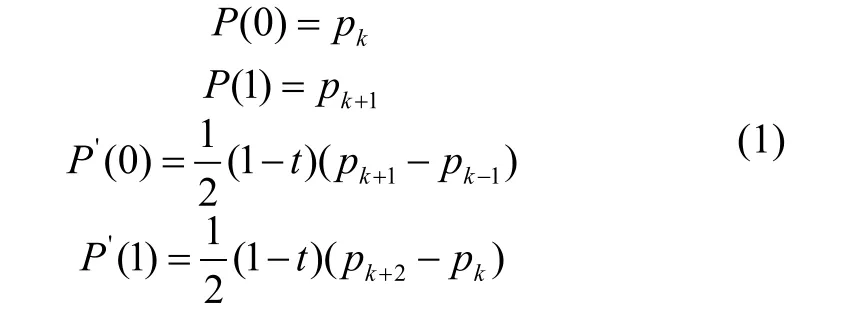
控制点Pk和Pk+1处的斜率分别与弦Pk-1Pk+1和PkPk+2成正比。参数t称为张量参数(tension parameter),用来控制Cardinal样条与输入控制点间的松紧程度。
我们可以将边界条件(1)转换成矩阵的形式:
其中Cardinal矩阵是:
将矩阵方程(2)展开成多项式表达式形式,为

2.2 区域填充
将原始数据进行样条插值连成区域后,需要对SW图谱的近600个结构进行区域填充。区域填充是以某种属性对整个区域进行设置,将图形有界区域的边界表示转换为区域内部像素表示的过程。即指定一个区域的边界,要求将有界区域中的一点(常称为种子点)赋予不同的颜色、灰度、线条或符号,然后将这种赋予形式填充扩展到整个有界区域内。
逐点判断填充算法是区域填充的基本方法,基于区域内的所有像素点,其原理是逐点判断图像中的每一个像素点,若在要填充的区域内部,则用指定的属性设置该点像素,否则不予处理。点P在简单多边形G的内外的判别为此法的重要内容,经典的方法为角度累加法和射线法。
本文采取基于左边的点在简单多边形内的判别算法,对射线法进行了改进,将点在简单多边形内外的判别转化为点在边的关系的判别。简单多边形曲线L左边即在有向曲线L的任一点A(x(t), y(t)))从右侧的正方向到左侧的负方向,沿逆时针所包含的扇形区域,如图2所示,所包含扇形区域的夹角为π。在平面上任一点P,过P作一条射线,若射线与边界曲线无交点,则P在简单多边形外;若有交点,且P在曲线左边的个数与P不在曲线左边的个数之差不为0,则P点在简单多边形内,否则,P在简单多边形外。此法简单、稳、定实用,适合于多个区域同时存在于同一张图像的情况。
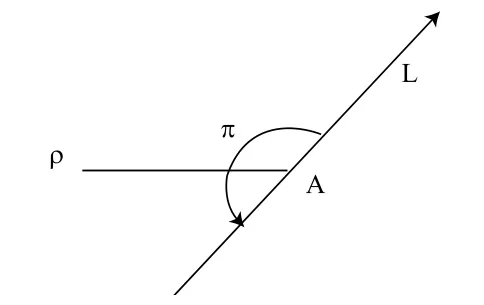
图2 有向曲线L左边Fig.2 Left side of the curve L
2.3 可视化
本文可视化系统框架基于Atamai软件包,Atamai是一个使用Python脚本语言开发的、基于VTK可视化包的,面向计算机辅助手术特别是手术导航的应用系统的中间平台。它的开发实现基于编程语言Python[3],可视化框架类图如图3所示。

图3 可视化框架类图Fig.3 The frame of visualization
EventHandler类定义了常用的消息事件以及消息有关的常量,并用来完成常见事件的绑定[3]。ActorFactory类中的OrthoPlaneFactory类对数据进行三维体剖面重建,结果由RenderPane类中的RenderPane2D类和RenderPane类进行绘制;在PaneFrame窗口类中进行显示,wxPaneFrame为最外层的窗口类。
2.4 解剖名称标识
本文采用分级的方式存取各解剖结构之间的从属关系、灰度值和解剖名称。通过将灰度值和解剖名称一一对应,系统就能通过鼠标所指结构获取结构的灰度值,同时显示对应的解剖名称。
Python 数据类型包括字典(dictionary)、元组(turple)和列表(list)等。字典dictionary类型,可以用来定义关键字(key)与值(value)之间一对一的关系。这个特点与 C 语言中的 Hash 表功能类似。通过设置关键字,我们就可以快速地获取与之对应的值。利用这个特点,本文选取字典dictionary来存储结构的解剖名称和灰度值信息,从而建立起解剖器官与解剖名称、解剖名称与灰度值之间的一一对应关系。灰度值的读取主要是调用Atamai软件包中的TextActorFactory类实现灰度值到解剖名称的显示。当读取脑解剖图谱的三个方向上任一面上的感兴趣区域(Region of Interest—ROI)时,系统获取鼠标所指的 ROI的灰度值,根据灰度值这个关键字取得字典中对应的解剖名称。
本文采用分级的方式表示结构间的从属关系的同时,又能够大大提高系统的效率,因为分级存储不仅可以大大地减少搜索的时间,而且可以帮助理清脑部各个结构之间的复杂关系。分级存储功能主要依靠wxpython的 TreeCtrl类实现。
3 SW图谱对比
我们用来作为本研究标准的SW图谱,无法获得每个组织结构的灰度值信息。但是可用它与我们新生成的SW图谱进行比较(如图4所示),来验证新生成的SW图谱的准确性。
4 实验结果
神经外科导航系统中主要包含了2个功能模块,SW图谱的可视化显示及解剖名称的实时标识。
4.1 SW图谱可视化显示
系统为了方便医生操作,设置了4个子视窗用于显示不同方向的脑解剖图,如图5所示,他们分别是横断面(Axial)、冠状面(Coronal)、矢状面(Sagittal)、和正交面(Ortho-view)。此模块可以实现如下功能:
(1) 从任意方向都可以观察图谱;
(2) 图谱任意缩放,这样有利于对相对较小的器官进行更加仔细的观察。
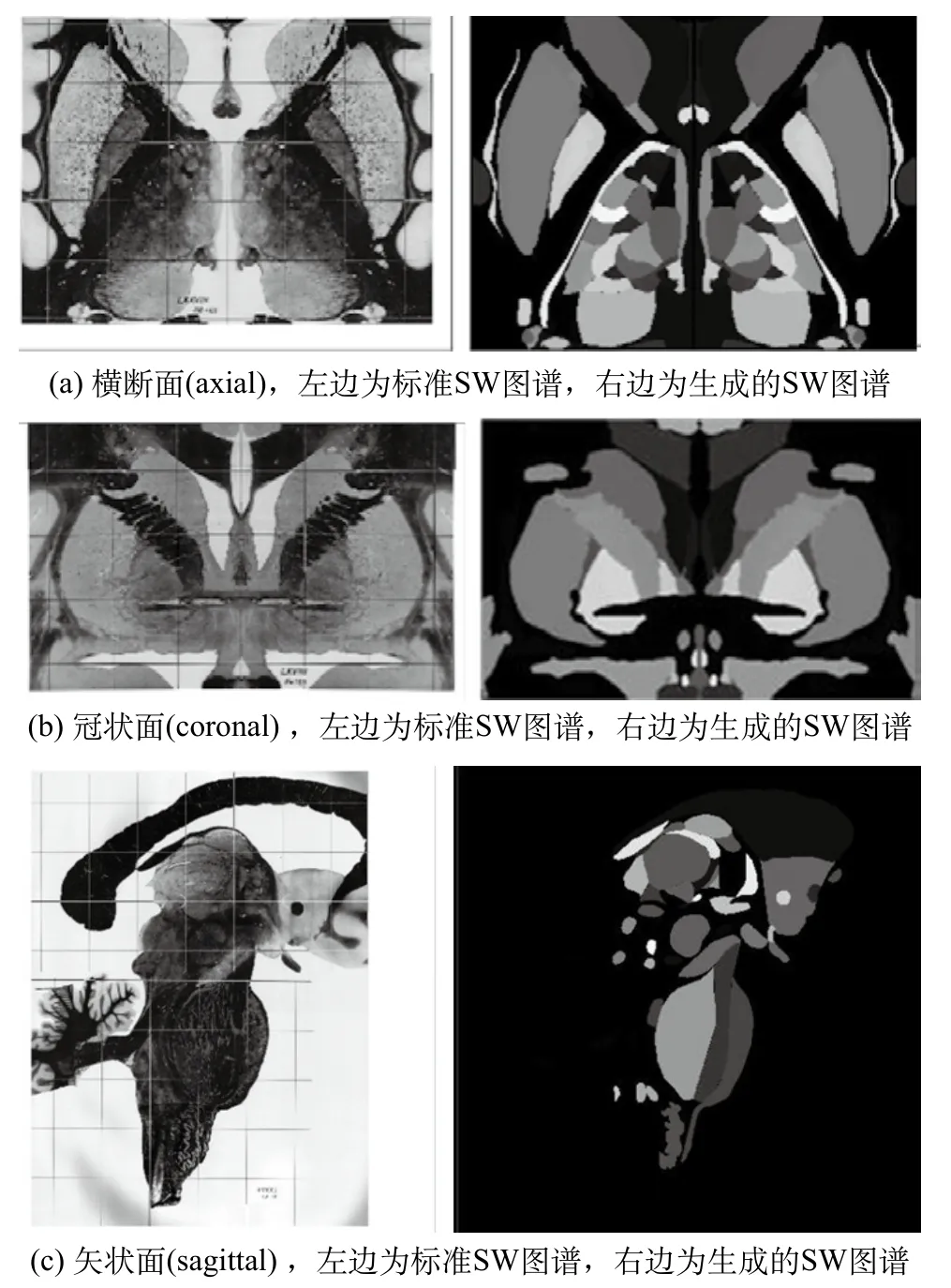
图4 结果对比Fig.4 Comparison of results

图5 SW图谱可视化显示Fig.5 Visualization of colored SW atlases
4.2 解剖名称实时标识
如图7所示,在系统界面的左下角还有一个树形结构的窗口。该窗口主要为方便医生查看不同解剖器官之间的类属关系以及所属的主区域。通过点击“Landmark”按钮,可以对轴状面、矢状面、冠状面和正交面上的感兴趣区域进行实时地标识;通过点击“UnLandmark”按钮,取消对感兴趣区域的标识。分级树状结构窗口如下图6所示。
图6 分级树状结构显示Fig.6 Display of hierarchical browser
图7中的a),b),c),分别显示了从横断面,矢状面,冠状面对同一个ROI的标识,对Ventriculus lateralis(Ve.l)进行标识。
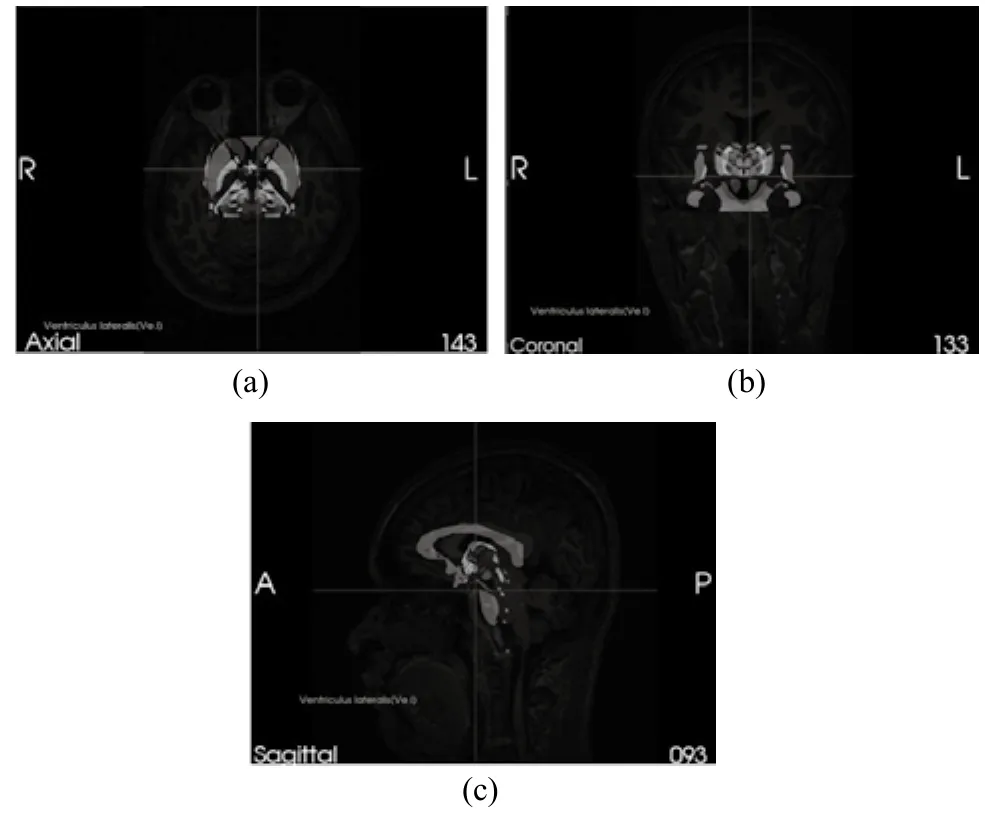
图7 ROIs的标识Fig.7 Landmark of regions of interest
5 总结
本研究不仅生成了有高准确度的SW图谱,还将它集成进神经外科导航系统中,不仅可以对三个方向的图谱进行分别二维显示,还可以将其交叉在一起进行立体显示,同时还能对图谱中的感兴趣的解剖标签进行实时的标识。在神经外科导航系统中,将SW图谱立体可视化显示并对解剖标签进行实时标识,不仅是脑神经外科手术的需要,也是医学脑科学教学的要求。
[1] Talairach J, Tournoux P. Co-planar stereotaxic atlas of the human brain[M]. New York : Thieme Medical Publishers. 1988
[2] 罗述谦, 阎华. 具有多种浏览器的数字化人脑图谱[J]. 中国医学影像技术, 2001, 17(9): 826-829.
[3] 裴巍. 神经外科脑解剖图谱的三维可视化应用[D]. 上海交通大学, 2008
[4] Schaltenbrand G, Wahren W. Atlas for stereotaxy of the human brain[M]. New York: Thieme Medical Publishers. 1998
[5] 荣晶晶, 李七渝, 张绍祥. 数字化人脑图谱研究进展[J].中国数字医学, 2010, 5(7): 35-38.
[6] 罗哲. 计算机辅助微创心脏外科手术导航系统的设计与实现[D]. 上海交通大学, 2010
[7] Nowinski W. L, Fang A, Nguyen B.T, et al. Multiple brain atlas database and atlas-based neuroimaging system[J]. Computer Aided Surgery, 1997, 2(1): 42-66.
[8] RongLiu, Lixu Gu, Jianrong Xu. The Implementation of nonlinear registration of brain atlas based on a piecewise grid system[A].MIPPR '07 [C]. Wuhan, China, 2007
[9] Nowinski W. L, Fang A, Nguyen B.T, et al. Talairach-tournoux/schaltenbrand-wahren based electronic brain atlas system[A].CVRMed '95 [C], France, 1995
[10] Niemann K. I. Van Nieuwenhofen. One atlas–three anatomies:relationships of the schaltenbrand and wahren microscopic data[J].acta neurochirurgica, 1999, 141(10): 1025-1038.
[11] Wei Pei, Lixu Gu, Pengfei Huang, et al. Visualization of three dimensional brain atlases for image guided neurosurgery[A].MIPPR '07 [C]. Wuhan, China. 2007