粒子群优化算法的PID控制在最大风能捕获系统中的应用
2012-01-25欧华龙曹先庆
欧华龙, 曹先庆
(沈阳化工大学信息工程学院,辽宁沈阳110142)
由于自然界风速存在不确定性的变化,在应用传统的最大功率点跟踪策略(MPPT)时,浆距角会在较大的范围发生变化[1-3].过度频繁的角度变化会使传统 PID整定算法发生饱和现象[4-6],如果没有及时消除积分饱和,则风机无法吸收最大风能,而且也可能导致风机浆距角始终处在某个固定范围内运行,最终导致风机发电能力下降.因此,很多学者将一些智能算法引入PID算法中,自整定PID算法被公认为比较有代表性的智能算法之一.与传统的PID算法相比较,本文采用粒子群收缩性优化的PID算法,使最大风能捕获系统具有更好的适应性,同时克服了风能随机性变化因素引起的功率扰动,减少了偏航操作频率,防止积分饱和现象的发生,从而整体上提高了系统的运行效率,达到功率最大化目的.而针对最大风能捕获的建模、动态特性分析,对于实际应用研究也具有重要意义.
1 MPPT控制策略
风力发电系统总体建模如图1所示.变桨距风轮机直接耦合IPMSG的转子,发电机的输出由机侧整流器经电容稳压滤波后,直接供给直流负载,并且假设直流侧的负载可以全部消耗经电容稳压后的电能.
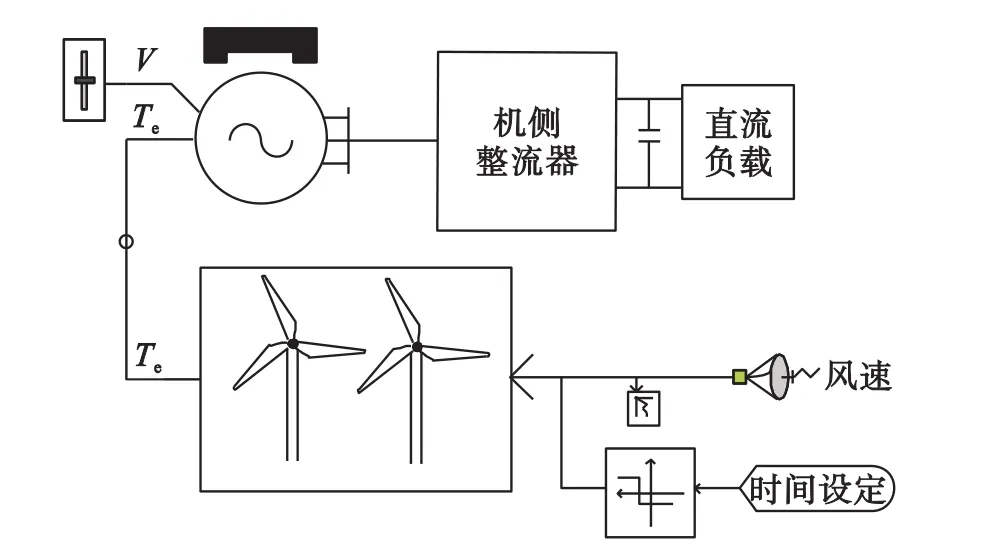
图1 风力发电机(WTG)系统Fig.1 System of WTG

式中:ρ空气密度,单位kg/m3;R:为风力机叶轮半径,单位m;v:空气进入风力机扫掠面以前的风速,单位m/s;Cp:风能利用系数;λ:叶尖速
变桨距风力机的输出功率为:比;β:桨距角,单位(°).
风机的风能利用系数Cp与叶尖速比λ的关系式为:

ω:风机转子速度,单位r/s.风机的风能利用系数Cp与叶尖速比λ的函数关系如图2所示.
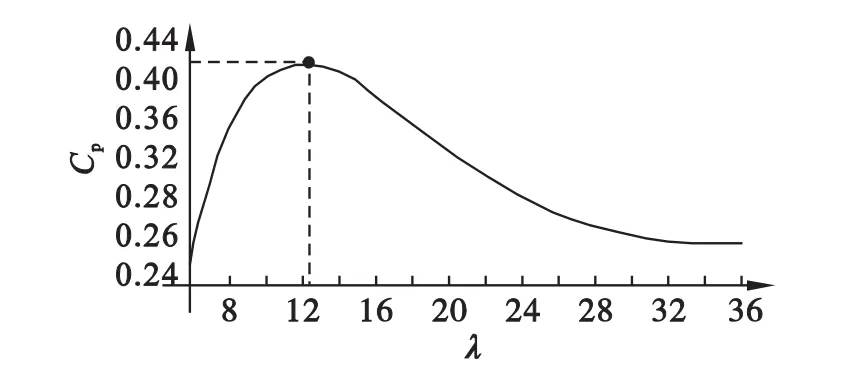
图2 Cp与λ的关系图Fig.2 The relation grape between Cpand λ
则风机输出的最大功率可另表示为:

在额定风速以下时,使Cp为最大值,浆距角β保持不变.不同的风速对应着唯一的Cp最大值,随着风速的变化,风机速度ω与风机输出功率的关系函数如图3所示.
图3 MPPT策略图Fig.3 The strategy graph of MPPT
假设此时风速v1,系统稳定运行在A点,风机的输出功率为PA,转速为ω1;当风速由v1变为v2时,由公式(5)可知,此时风机发出的功率PA将变为PB,而由于转速的机械惯性和控制系统的滞后性,转速ω1无法瞬间达ω2,因此,风机的输出功率和转速分别沿着BC和AC曲线达到稳定运行点C,此时功率重新平衡,风机的最大输出功率为Pmopt.
2 粒子群优化控制算法(PSO)
传统最大风能捕获系统中,浆距角的PID控制框图如图4所示.实时风机速度ω与风机额定速度ωref在比较器进行比较,当ω小于ωref时,Δω为零,浆距角不动作;当ω大于ωref时,ω与ωref的差Δω进入PID调节器,经PID调节后将输出值转化为0°~45°之间的角度值对桨叶进行控制.

图4 浆距角控制图Fig.4 The control graph of pitch angle
由于局部地区风速变化幅度不同,当风速发生突变时,这种控制结构会产生一定的响应延迟以及无法判断是否及时消除积分饱和,又因为机械固有的惯性,这不仅会对风机造成机械损伤,而且风能得不到最大化的利用,造成资源浪费.因此,采用粒子群收缩优化算法的PID控制结构.
PSO初始化为一群随机粒子,然后通过叠代找到最优解,在每一次叠代中,粒子通过跟踪2个“极值”来更新自己,第一个就是粒子本身所找到的最优解,这个解叫做个体极值kp,另一个极值是整个种群目前找到的最优解,这个极值是全局极值kI,其表达式如下:
式中d=1,2,…,n;i=1,2,…,m,数值m、n分别由风机输出功率P与转速ω关系图中的横纵坐标取值范围决定.rand()是在(0,1)之间的随机抽取的数值;c1、c2是学习因子,由最大风能捕获系统的固有机械特定所决定,本文取C∈(3.05,3.2).

w为风机的重力惯性,wmax、wmin分别是w的最大最小值,根据随机风的极高极低风速特性及达到约束粒子飞行速度,增强搜索能力的目的,取重力惯性wmax∈(9.8,8.3),wmin∈(1.5,3);t、tmax分别是当前采样时间和周期采样时间最大值.

图5 粒子群收缩优化控制图Fig.5 Control graph of particle swarm optimization algorithm

3 仿真结果与分析
PSCAD/EMTDC是专用于电力系统分析和相关研究的通用电力仿真环境软件,具有很强的动态控制能力[7].因此,本文以PSCAD/EMTDC为仿真环境,分别对变桨距风机、PID控制器、控制模块进行建模.
如图6所示,初始风速为10 m/s,在第3 s时风速开始增加,并在3.6 s时风速超过额定风速(14 m/s),并继续增加到15 m/s,持续2 s后在6 s时风速开始下降,并在6.4 s时降到额定风速14 m/s,在第7 s时风速降到初始风速10 m/s,并一直保持不变.

图6 风速变化曲线图Fig.6 The curve of wind speed
在图7中,当风速超过风机的额定速度时,浆距角β开始变化,使风机能在高于额定风速时保持额定功率的输出.通过引入粒子群收缩优化的PID控制算法前后对比,可以看出:PSO收缩优化算法的引入不仅增强了距角动作的鲁棒性,浆距角动作响应的速度提高,且能快速地响应MPPT控制策略的实现.

图7 风机浆距角变化图Fig.7 Variation diagram of pitch angle
图8中,当风速在额定风速以下时,风机效率大概在0.425左右,在3.6 s时风速增加到额定风速,风机的效率Cp开始下降,通过PSO收缩优化算法,既能保持风机效率输出的稳定性,又能保证风机在最大风能捕获下有较高的效率输出.

图8 风机效率图Fig.8 The efficiency of winder
在图9中,通过传统PID算法与PSO收缩优化算法在0~1.0 s内的仿真对比图可以看出:原系统响应的上升时间由0.21 s减少到0.17 s,超调量由1.12降到0.48,调节时间由0.62 s降到0.58 s,同时消除了静差,系统适应性及鲁棒性都得到了增强.

图9 PSO与PID控制仿真图Fig.9 The PID and PSO control simulation
4 结束语
基于PSCAD仿真环境下,可以看出引入PSO收缩优化算法后,不仅使系统具有很强的自适应性,而且它不依赖与控制器的设计经验,它的自整定控制系统具有更好的动态特性,也为今后实际的PSO收缩优化算法提供了理论基础.
[1] Slootweg J G,De Hann S W H,Polinder H,et al.General Model for Representing Variable Speed Wind Turbines in Power System Dynamic Simulations[J].IEEE Trans.on Power System,2003,18 (1):144-151.
[2] Han Kun,Chen Guo-Zhu.A Novel Control Strategy of Wind Turbine MPPT Implementation Direct-drive PMSG Wind Generation Imitation Platform[EB/ OL].(2009-05-17)[2011-10-08]http://ieeexplore.ieee.org/xpl/freeabs_all.jsp?arnumber= 5157778.
[3] Morimoto S,Nakayama H,Sanada M,et al.Sensorless Output Maximization Control for Variable-speed Wind Generation System Using IPMSG[J].IEEE Trans.Ind.Appl.,2005,41(1):60-67.
[4] 蒋红梅.模糊PID控制在变风量空调系统中的应用研究[D].西安:西安建筑科技大学信息与控制工程学院,2001.
[5] Kang Jinsong,Zhang Zhiwen,Lang Yongqiang.Development and Trend of Wind Power in China[EB/ OL].(2007-08-25)[2011-10-08]http://ieeexplore.ieee.org/xpl/freeabs_all.jsp?arnumber= 4520352.
[6] Datta R,Ranganathan V T.A Method of Tracking the Peak Power Points for a Variable Speed Wind Energy Conversion System[J].IEEE Trans.Energy Convers.,1999,18(1):163-168.
[7] Kim Seul-Ki,Kim Eung-Sang.PSCAD/EMTDCBased Modeling and Analysis of a Gearless Variable Speed Wind Turbine[J].IEEE Trans.on Energy Conversion,2007,22(2):421-430.