小型水下机器人在复杂水下地形中的目标搜寻应用
2012-01-22,,,,,
,, , ,,
(1.上海海事大学 水下机器人与智能系统实验室,上海 201306;2.华中科技大学 船舶与海洋工程学院,武汉 430074)
常见的水下机器人可分为ROV(remotely operated vehicle)和AUV(autonomous underwater vehicle)两类。由于AUV基本上还处于研究和试用阶段,一些关键技术还有待突破,尚难在工程应用中大范围推广。但利用水下机器人ROV探测水下目标物、铺设管线等工程应用已有先例[1-3],基本上是大中型的ROV设备,一般都配置有精密仪器以及专用的执行工具,具有操作复杂、对水面保障系统要求高、需要专业技术人员支持以及作业成本昂贵等特点。一般的水下工程难以采取此类作业方案。通用的小型ROV具有水下运动控制灵活、收放维护简便以及造价相对低廉等优点,研究其执行水下任务的一般方法具有重要的意义[4-5]。目前大部分的文献着重于理论方法的研究和应用前景的展望[6-8],较少涉及水下工程应用。
本文结合一次成功的水下小目标搜寻案例,对运用小型ROV在局部范围内执行水下搜寻任务的方法进行研究和总结,提出一种效率较高、操作简易以及成本较低的水下目标物搜索方案。
1 搜寻任务背景
2010年8月至12月,某地方部门采取了多种手段(水面船舶拖滚钩做拉网式搜索,水下探照摄像以及潜水员潜水摸索等)寻找沉于湖北荆门漳河水库底的两件目标物,但由于目标物散落在1 000 m×1 000 m水域范围内,且水下环境过于复杂(水深变化范围在4~70 m之间;水下地貌呈现陡坡、沟谷及深坑等;水底覆盖有水草、泥沙、岩石、沉积物、树木及残留建筑物等)。搜寻效率低、风险大、耗时长,在耗费了大量的人力、物力和财力之后仍未找到目标物。
2010年12月,运用小型ROV设备、侧扫声呐及手持GPS定位系统等设备,协助地方部门开展水下搜寻任务。采用的ROV是美国OUTLAND公司主要用于观测的小型水下机器人OUTLAND1000,体积约为70 cm×40 cm×30 cm,配置了两个水平推进器、一个垂向推进器以及一个侧向推进器,艏向装有前视成像探测声呐以及具有前后360°旋转视角的水下摄像头,见图1。
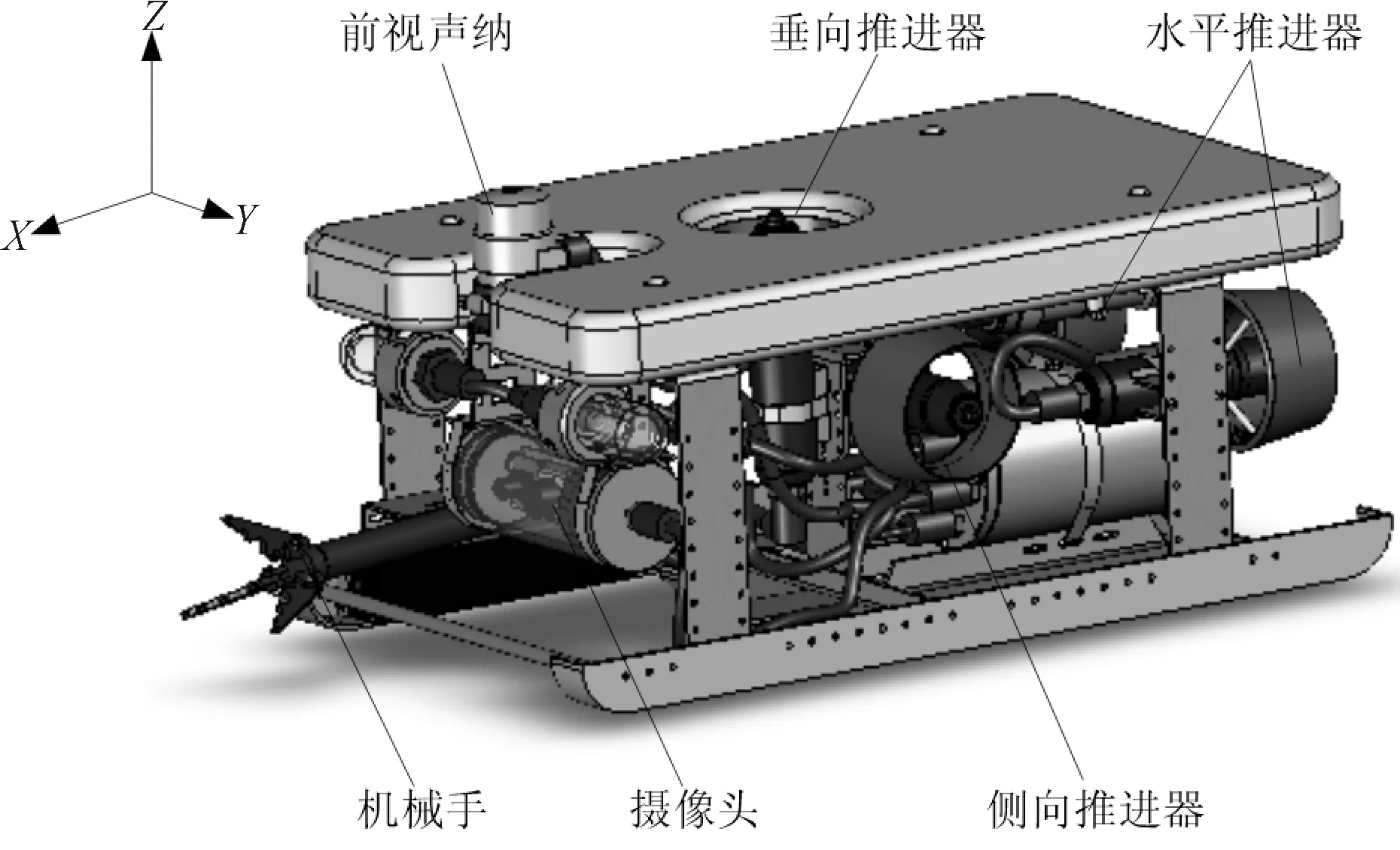
图1 OUTLAND 1000 ROV
2 搜寻任务准备
2.1 ROV作业准备
1)环境评估。环境评估包括水面风速风向、雨雪、浪涌、气温、水深、水下地貌、水底物质构成等。水面的情况可能对作业船舶及甲板上的作业人员造成不同程度的影响,在环境恶劣的情况下必须暂停作业。水下的情况也对ROV的配置提出不同的要求,比如水底光线不足要求ROV提供足够亮度的照明,水体透明度较差,则除了配备水下摄像机之外,需要配置成像声呐来探测超视距的目标,见图2。

图2 前视声呐探测目标
2)设备检查。设备检查包括照明摄像系统、防水接插件、各种执行器和传感器等部件的完好和密封性;ROV浮力材配载和平衡位姿调节。
3)人员配置。人员配置包括设备装配与收放作业人员、指挥调度人员、ROV操作人员及船舶定位人员等,见表1。各工作人员分工必须明确固定,保持顺畅的通信及任务协作。
表1 基本作业人员配置
2.2 ROV搜索路径规划
一般情况下,搜索范围均远大于ROV的探测范围,为实现整个搜寻水域的全覆盖以及提高执行搜寻任务的效率,需要事先做好搜索区的划分和搜索路径的规划工作。路径规划见图3。
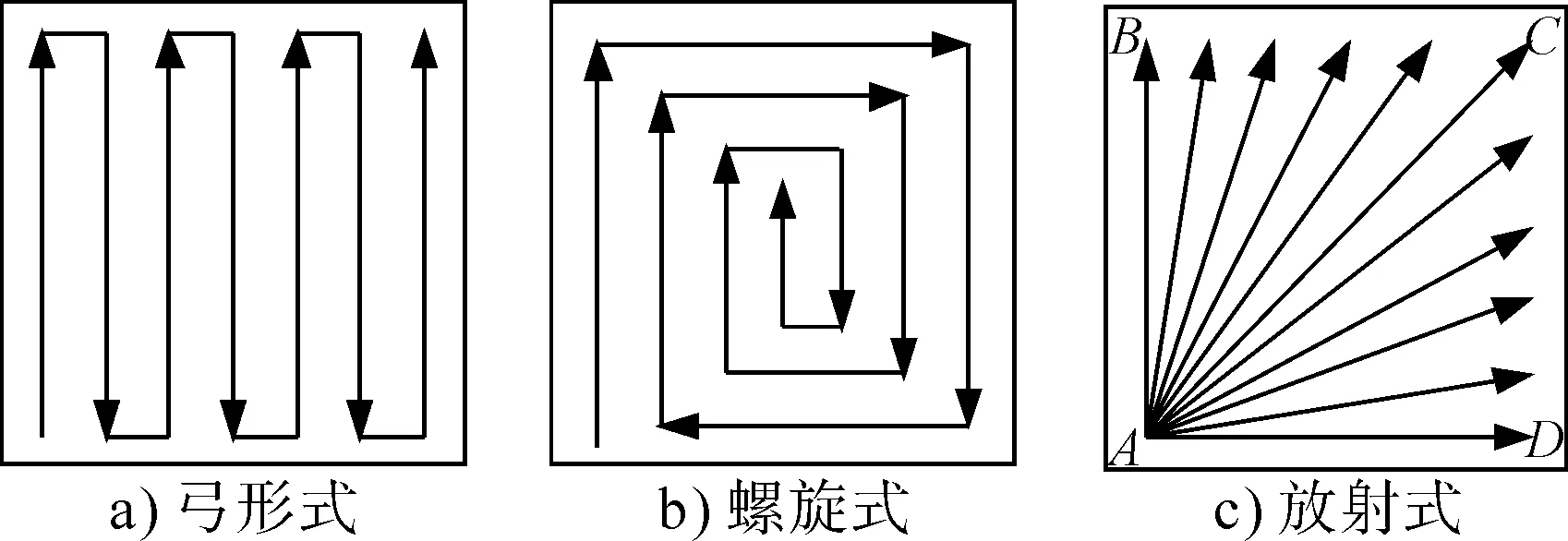
图3 路径规划
图3a)和图3b)所示为AUV常用的搜索路径,但是对于与水面控制台有脐带缆相连的ROV,这种路径并不适合。其原因主要有两点:①ROV由人操纵,难以实现精确的路径走向;②在水底高低不平、障碍物较多或者有水流影响等状况下,ROV的绕转运动容易导致其脐带缆被障碍物绊住,甚至缠绕,从而导致其陷入困境无法脱身。因此,在复杂的水下环境中,为保障ROV自身安全,一般采取定向直航的单向搜索路径,在完成一趟单程搜索之后,将ROV上浮回收,再从起点开始下一条路径的搜索。图3c)显示了较为实用的ROV放射状搜索路径的规划方案。图中位置A为ROV搜索的起始点(也就是水面母船的停泊位置),ABCD所围成的正方形区域为单块搜索区,其对角线的长度LAC必须满足式(1)。
(1)
式中:L——ROV最大可用缆绳长度;
D——区域最大水深。
因此,单块搜索区的面积S为
(2)
整个搜索范围可划分成若干单片搜索区,每个子区以A为起始点,做直线(ROV定向)单程搜索,扇形覆盖搜索子区。在完成单块搜索区之后,船舶定位到另一块搜索子区,重复类似的搜索过程,直至搜索到目标为止。
若具备探测水底地貌的侧扫声呐等设备,可先使用该设备获取整个搜索范围的水深和水底概貌等信息,从中标定可疑的目标点。根据可疑目标点的分布情况,缩小并划定搜索区,再利用ROV进行搜索,由此可以提高搜索效率。
2.3 水面定位
由于水面风浪的影响,母船在水面出现较大的漂移可能导致ROV被拖离作业区,若遇上缆绳被障碍物缠绕则可能导致缆绳破断及ROV损失。因此,水下搜索任务的展开必须考虑水面风浪的影响,做好母船的锚定工作,见图4。目前在水面可以采用船舶动力定位系统,水下可采用短基线定位系统,一般的工程应用中若不具备该条件,可以采用简易的定位策略:水面GPS定位设备实时监测母船的动态位置变化,利用母船自身动力将漂移控制在一定的范围内,或者配备一艘拖船来协助母船定位。

图4 船舶定位与ROV水下作业
3 水下目标搜寻
3.1 探测水下地貌
首先,在船上利用手持GPS终端测定范围为1 000 m×1 000 m水域的坐标。接下来利用侧扫声呐探测该水域内的水底地形,初步获取水下地貌及可疑目标物的信息。
具体过程是将声呐置入水中适当深度,通过拖缆连接到母船上的终端设备,靠母船拖行对水底地貌进行扫描。作业过程中发现母船难以保持匀慢速(航速2 kn左右)的航行状态,这导致了声呐获取的水底地貌图像不理想。同时,由于船艉螺旋桨转动在水面产生了波浪和气泡,这对声呐图像造成严重的噪声干扰。因此将方案改进为由一艘机动小船来拖动母船,母船关停螺旋桨,完全靠拖船慢速拖行。这种改进的方案使得母船基本保持了2 kn的慢速直线运动,尾流和气泡大大减少,侧扫声呐探测到清晰的水底地貌信息。在获取整个搜索范围内的地貌图后,根据目标的特征,圈定可疑目标点。由于水下环境复杂,经排查后可疑目标点达13处,见图5。
3.2 划定搜索分区
根据水底地貌图上的可疑目标点的分布情况,进一步缩小搜索范围,划定I、II、III、IV和V等5个正方形的搜索子区。每个搜索子区的边长由式(1)确定,搜索路径按图3c)进行规划。由于水下机器人自带的缆绳长L=300 m,由侧扫声呐图像估算出搜索水域内的水深在4~60 m区间,充分考虑余量之后,划定每片搜索子区的面积为
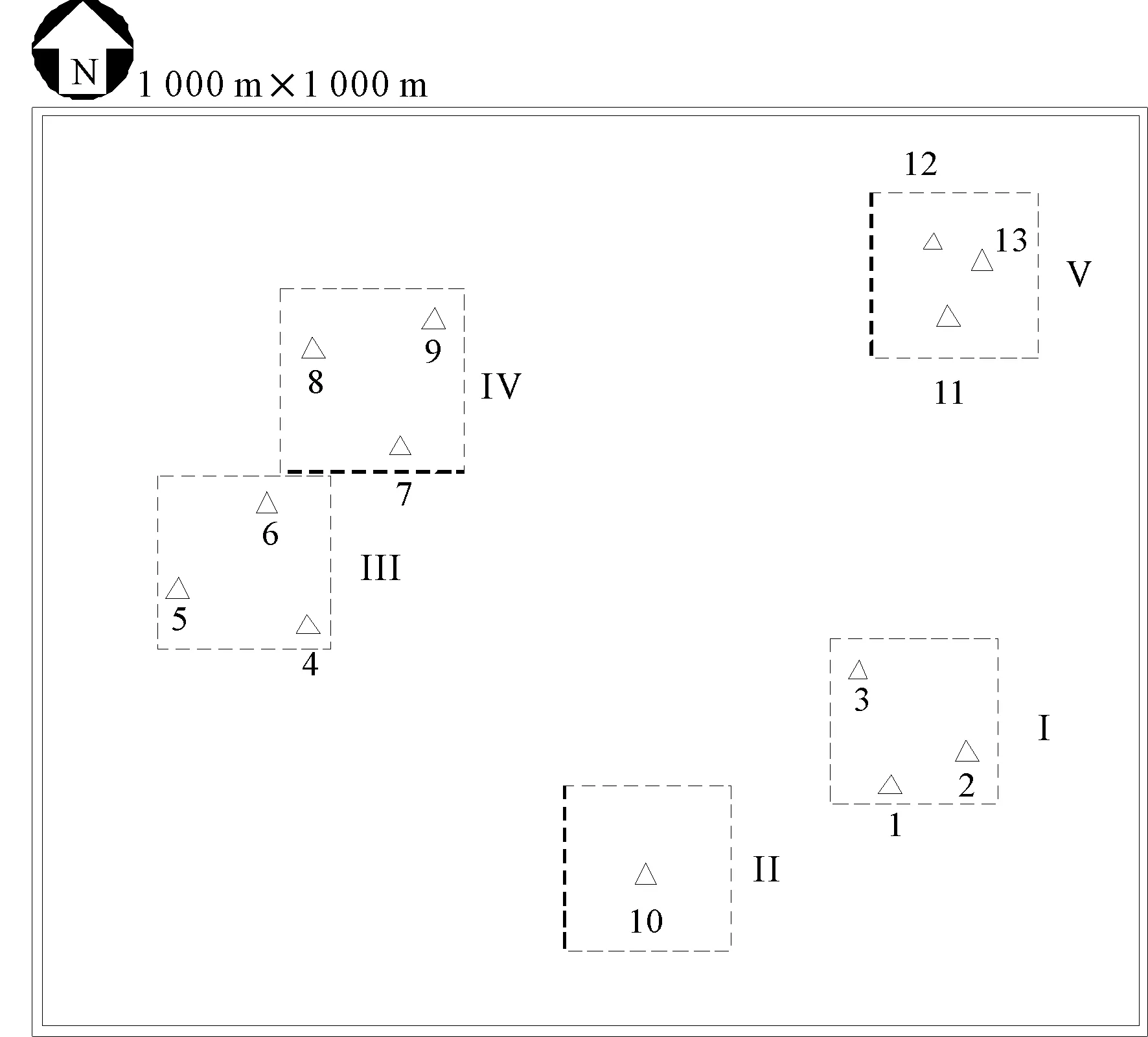
图5 按可疑目标点划分搜索子区
200 m×200 m。确定搜索子区后,将母船定位到各子区,再释放ROV对各子区进行全覆盖搜寻。母船的定位结合了电子地图和GPS手持终端设备的数据,在计算机屏幕上监控母船位置的动态变化。由于母船本身不具有动力定位系统,因此由一艘拖船协助控制母船的漂移量。ROV从I~V区逐片实施全覆盖搜索,采用图3c)所示搜索路径。
3.3 ROV避障策略
ROV通常不具备自主避障的功能,一般由操作人员充分利用声呐和水下摄像等设备提供的信息来实现灵活的避障航行。在复杂的水下地形环境中,ROV既要按照事先规划好的路径航行,又要避开高低不平、形状各异的障碍物,对区域进行全覆盖的搜索,这要求操作人员具备丰富的操作经验和技能。为ROV制定避障规则可以有效地指导操作人员操控ROV,保证设备安全及顺利完成作业任务。常见的水下环境状况及ROV相应的避障规则见表2。
3.4 搜寻结果
ROV在搜索I区时,深度传感器数据显示I区相对水深较浅;前视声呐图像显示该区地势平缓,水中障碍物较少;水下摄像视频显示水底主要物质为硬质沙土。因此,整个搜寻过程比较顺利,很快发现其中一件目标物。接下来根据有关部门给出的线索,判断另一目标出现的位置应该在I区的西北方向。由此排除II区和V区的可疑点,将搜寻范围缩小在III区和IV区内。
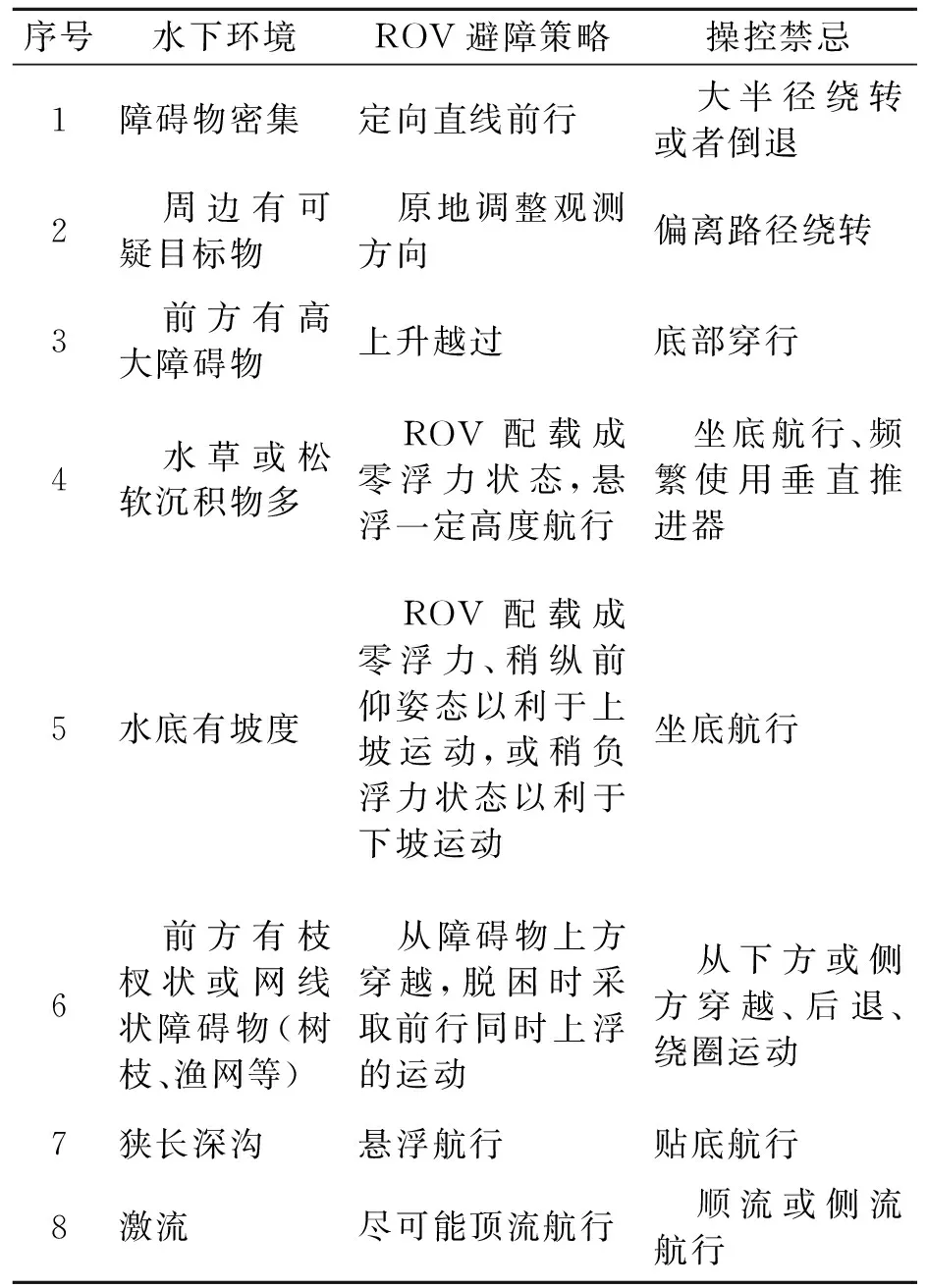
表2 ROV避障规则
ROV在搜索IV区过程中,发现水底地形异常复杂,水深变化在20~50 m的范围内,有陡坡、岩石、树桩等障碍物,水底主要物质为松软的灰褐色沉积物。当ROV撞击沉积物或者垂直推进器运转的时候,水体被搅浑,而且长时间内难以恢复澄清。这导致摄像头观察效果变差,搜索进度缓慢。根据表2的第4条及第5条规则,将ROV的垂直推进器关闭以避免搅浑水体;将ROV配载成略负浮力状态以实现自然的下坡滑行运动;将ROV姿态配置为略纵后倾,使得水平推进器的推力方向为斜向上,由此实现上坡运动。最终搜索结果是在IV区约37 m水深处的某个斜坡上成功搜寻到另一个目标。至此,整个搜寻任务圆满完成,实际作业7 天,操作人员6名。
4 结论
由于水面和水下环境的不确定性和复杂性,在局部水域范围内搜寻水底小目标是一项难度较高的任务。充分利用小型水下机器人的深水探测能力,结合其他相关探测设备,采取适当的搜索策略及水面定位技术,可以实现高效率、低风险和低成本的水下目标搜寻作业。
[1] 吴中平,江国金,徐劲松.猎手号水下机器人南海深水打捞作业[C]//救捞专业委员会2003年学术交流会论文集,上海:中国航海学会救助打捞专业委员会, 2003: 83-84.
[2] 刘 阳,李军安.ROV在深水海底电缆铺设中的应用研究[J].湖南农机,2010,37(2):34-35.
[3] 姚华俊.水下机器人的部件原理探究以及工程运用分析[D].上海:上海交通大学,2006.
[4] 夏光辉,余义德,宫 建.一种水下残骸精确定位方法[J].全球定位系统,2009(4):29-32.
[5] 张 辉,刘慕亮,肖晓凌,等.无人遥控潜水器作业与安全综述[J].中国造船,2006,47(1):141-146.
[6] 邢志伟,于开洋,王晓辉.超短基线定位系统在ROV动力定位中应用的可行性研究[J].机器人,2002,24(6):487-491.
[7] 张文瑶,裘达夫,胡晓棠.水下机器人的发展、军事应用及启示[J].中国修船,2006,19(6):37-39.
[8] 周 银,张建文,黄晓欧.水下机器人(ROV)在消防部队抢险救援中的应用前景探讨[J].消防技术与产品信息,2007,9(1):40-43.
