自适应模糊PID控制策略在中央空调系统中的应用研究
2012-01-18许立
许 立
(河北北方学院附属第一医院后勤管理处,河北 张家口075000)
0 引 言
中央空调[1]系统是智能化建筑中一个重要的组成部分,但是中央空调系统的能耗量非常大,约占整个建筑能耗的60%~70%,因此如何使中央空调系统节能,已成为建筑节能的重点;而中央空调的控制策略直接决定着中央空调的能耗量,所以中央空调的控制策略成为人们研究的重点.
目前,中央空调系统的控制主要采用经典控制理论中的PID数学模型,但由于空调系统是具有非线性、大滞后、时变等特性的复杂控制对象,很难建立精确的数学模型,使传统的PID控制难以发挥良好的作用.近年来模糊控制在复杂的工业控制中得到了广泛的应用,因其不依赖对象精确的数学模型而具有较强的鲁棒性.但是模糊控制器稳态精度低,动态性能欠佳[2].因此,本文提出了基于PID控制模型和模糊控制模型的自适应模糊PID控制策略,并应用于中央空调实际控制中,得到了比较满意的控制品质.
1 标准PID控制器的设计
标准PID控制器[3]是二阶线性控制器,包括了比例 (Proportion)、积分 (Integral)、微分 (Deriva-tive)三个控制环节,通过调整比例、积分和微分三项参数,使得大多数的工业控制系统获得良好的闭环控制性能.在工业控制中采用其离散算式:

其中u(n)为控制器的输出量,e(n)为误差信号,Kp为比例因子系数,Ki为积分因子系数,Kd为微分因子系数.Kp、Ki、Kd在不同的工况下参数需修改才能自适应控制,在实际应用时需要根据遗传算法优化、神经网络辨识得出,由于一般被控对象都有较大的延迟特性,所以,很难获得理想的控制效果.只有实际工况比较典型时,对累计误差、超调量、调节时间等指标做适当限制的情况下,才能获得较优的控制效果.
2 标准模糊控制器的设计
标准模糊控制器[4]是运用模糊推理的方法,将专家知识库和经验值描述为 “IF…,THEN…”语句所表达的一组过程控制规则与策略,能够有效的控制系统的控制过程.它由三部分组成:模糊化、控制规则推理和反模糊化.模糊化和反模糊化单元直接与过程单元相连,控制规则推理单元则包含了专家知识库和经验值.设计时,宜采用高斯函数描述误差e、误差变化率ec以及输出u的隶属函数,并根据控制特性与仿真效果调整函数分布情况.为取得更优的效果,推理规则Ke、Kec、Ku一般采用遗传算法进行优化.模糊控制由于缺少积分环节,控制过程中会产生较大稳态误差,而且由于控制规则不能够无穷细分,调节量大时,容易发生波动,调节量小时,稳态误差又会加剧.
3 自适应模糊PID控制策略
3.1 自适应模糊PID控制器的结构设计
选取模糊模型中的TS(Takagi-Sugeno)模糊模型[5],将误差e、误差变化率ec、误差累积es三个变量作为模糊控制器的输入变量,输出变量为u,构成一个三维模糊PID控制器,控制系统的结构框图如图1所示.
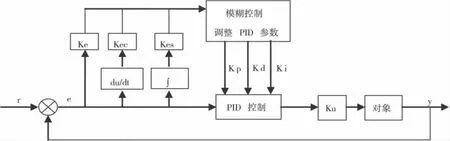
图1 控制系统结构原理图
3.2 控制规则的设计
基于TS模型的模糊PID控制规则用下式的形式表示:

因此,自适应模糊PID控制器的控制规则就是通过确定形如上式的表达式,并借鉴一般模糊控制规则的方法,将整定PID控制器参数的经验转化为TS模型的模糊PID控制器的控制规则,形成自适应模糊PID控制策略.
3.2.1 输入变量词集及其隶属函数的确定
为误差论域e建立五个模糊子集:NB,NS,ZO,PS,PB;为误差变化率论域ec建立三个模糊子集:NS,ZO,PS;为误差累积es建立三个模糊子集:NS,ZO,PS;各个模糊子集的隶属函数曲线为全对称、全交叠的连续、线性的三角形和梯形,如图2和图3所示.

图2 误差e的隶属函数曲线
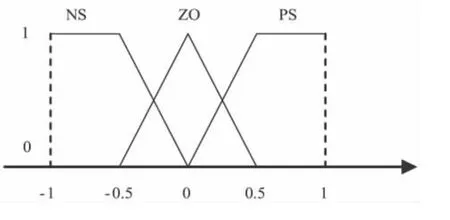
图3 误差变化率ec和误差累积es的隶属函数曲线
3.2.2 PID参数整定的原则
进行PID参数整定时,遵循的原则有:
(1)当误差e较大时,应快速消除误差,所以要提高响应速度,Kp值可取大一点,Ki值可为零,即采取PD控制.
(2)当误差e较小时,为继续减小误差,防止超调量过大,产生振荡,Kp值应减小,Ki值取小些,即采取PID控制.
(3)当误差e和误差变化率ec同号时,表示被控量的变化趋势是向着偏离设定值方向变化的,为使响应尽快回调,Kp应取大值;当e和ec异号时,表示被控量的变化趋势是向着接近设定值方向变化的,所以被控量趋近设定值时,比例作用阻碍了异号的积分作用,避免了由积分超调引起的振荡,有利系统控制,但是当被控量远离设定值并向设定值趋近时,则由于这两项异号,控制过程会减慢.当e较大ec为负值时,Kd应取负值,从而加快控制系统的动态过程.
(4)误差变化率ec的大小表示误差变化速率和趋势.
(5)微分环节的作用是控制误差变化情况,阻碍误差变化趋势,减少超调量,避免振荡,使系统更稳定,加快系统响应速度,减少调节时间,改善系统动态指标,因此,在调节过程中适当加入微分环节非常必要.
实际控制中,被控量主要取决于误差e,而误差变化率ec仅仅作为判断变化趋势的依据.
3.3 控制规则的描述
依据PID参数的调整原则,结合专家知识和经验,由文献[6]归纳出下列10条模糊表达式以描述参数整定规则:
R1:If e is NB,ec is N,then u1=2.5 Kpe+0.35 Kdec
R2:If e is NB,ec is P,then u2=2.5 Kpe-0.35 Kdec
R3:If e is NS,ec is N,then u3=Kpe+Kdec+0.35 Kies
R4:If e is NS,ec is P,then u4=Kpe+Kdec+0.35 Kies
R5:If e is not ZO,ec is ZO,then u5=2.5 Kpe+Kdec+Kies
R6:If e is ZO,then u6=0.65 Kpe+0.65 Kdec+0.35 Kies
R7:If e is PS,ec is N,then u7=1.5 Kpe+Kdec+0.35 Kies
R8:If e is PS,ec is P,then u8=1.5 Kpe+Kdec+0.35 Kies
R9:If e is PB,ec is N,then u9=2.5 Kpe-0.35 Kdec
R10:If e is PB,ec is P,then u10=2.5 Kpe+0.35 Kdec
3.4 控制规则参数的确定
3.4.1 控制规则后件中常系数的确定
控制规则后件中的常系数是各项作用因子的加权系数,体现出不同情况下控制系统重视比例、积分和微分环节的程度;一方面,这些常系数的确定要依据PID参数整定的原则调节,例如图4所示,第1、2、9、10条规则对应体现于图中的D、E、A、H处,此时宜采用PD控制,且Kp值要取大些,Kd值要取小些,因而这两个系数分别取2.5和0.35,第3、4、7、8条规则分别对应于C、F、B、G处,因其靠近平衡态,宜采用PID控制,第5条规则对应于响应曲线的上下峰值处附近,也采用PID控制,但Kp值宜取大些,第6条规则对应于响应曲线与设定值相交处附近,由于这时误差己很小,为了消除稳态误差,亦采取PID控制;另一方面,为保证相关规则之间的转换能够平滑过渡,避免出现相邻规则间受控量大幅跳跃的情况出现,对各条规则之间系数的选择还要从全局上综合考虑,这里我们通过参数Kp、Ki、Kd的调节来满足.

图4 系统响应曲线图例
3.4.2 控制规则中Kp、Ki、Kd的确定
控制规则中Kp、Ki、Kd初值的确定可依据标准PID参数的整定方法,例如采取如Z-N法和工程整定法进行整定.因为规则后件中的常系数已经确定,但为保证相关规则之间的转换能够平滑过渡,避免出现相邻规则间受控量大幅跳跃的情况出现,所以Kp、Ki、Kd的取值不能太大或者太小.由于遗传算法拥有强大的搜索能力,故而我们采用自适应遗传算法[7]对控制规则中的参数进行寻优.
3.5 系统量化和比例因子的确定
本文中自适应模糊PID控制器的控制规则采取了PID控制形式的线性方程解析形式,有两个优势:第一,可以充分借鉴常规PID控制中参数整定的规则;第二,采取连续的解析方程式描述控制规则,可不受模糊变量论域量化等级有限的限制,既能够对误差、误差变化率的量化因子Ke、Kec、Kes取较大的值,又能够对输出比例因子Ku取的很小,同时对参数进行自适应调整,获得动态响应快和稳态精度高的良好性能.鉴于调整隶属函数对系统性能影响很小,量化因子和比例因子却对系统的性能影响很大,且相对容易调整,所以这里主要考虑量化因子和比例因子的调整及对系统性能的影响.由于待整定的参数没有一个控制品质衡量标准,且数量繁多,为此这两个因子亦采用遗传算法进行优化,从而获得优化指标下最优的控制性能.
3.6 模糊推理与反模糊化
模糊推理和反模糊化过程选用代数积即重心法进行.得到控制输出表达式:

4 系统控制的实现
将本文中研究的控制策略应用于某医院住院楼的中央空调系统中,以现有楼宇自控产品 (施耐德)为基础,根据楼宇自控系统现状和实际工况,在中央空调温度控制系统中引入自适应模糊PID控制策略,依靠计算机程序采用全软件方式实现对系统的控制.中央空调系统的控制参量是冷冻水循环系统的出水与回水温差,将其值与设定的目标值进行实时比较,经过量化后通过调用现场的直接数字控制器 (DDC)中内嵌的PID控制器,可得到不同的误差e、误差变化率ec和误差累积es,经过基于自适应的模糊推理规则,获得相应的输出变量即比例、微分和积分的系统参数;再用该参数精确地控制系统的输出,即控制PWM电路的输出占空比,从而得到相应的0~20 mA的控制电流;用此控制电流控制变频器[8].使其输出对应0~50 Hz的交流电源,控制电机的转速,从而控制中央空调主机功率.自适应模糊PID算法程序流程图如图5所示.
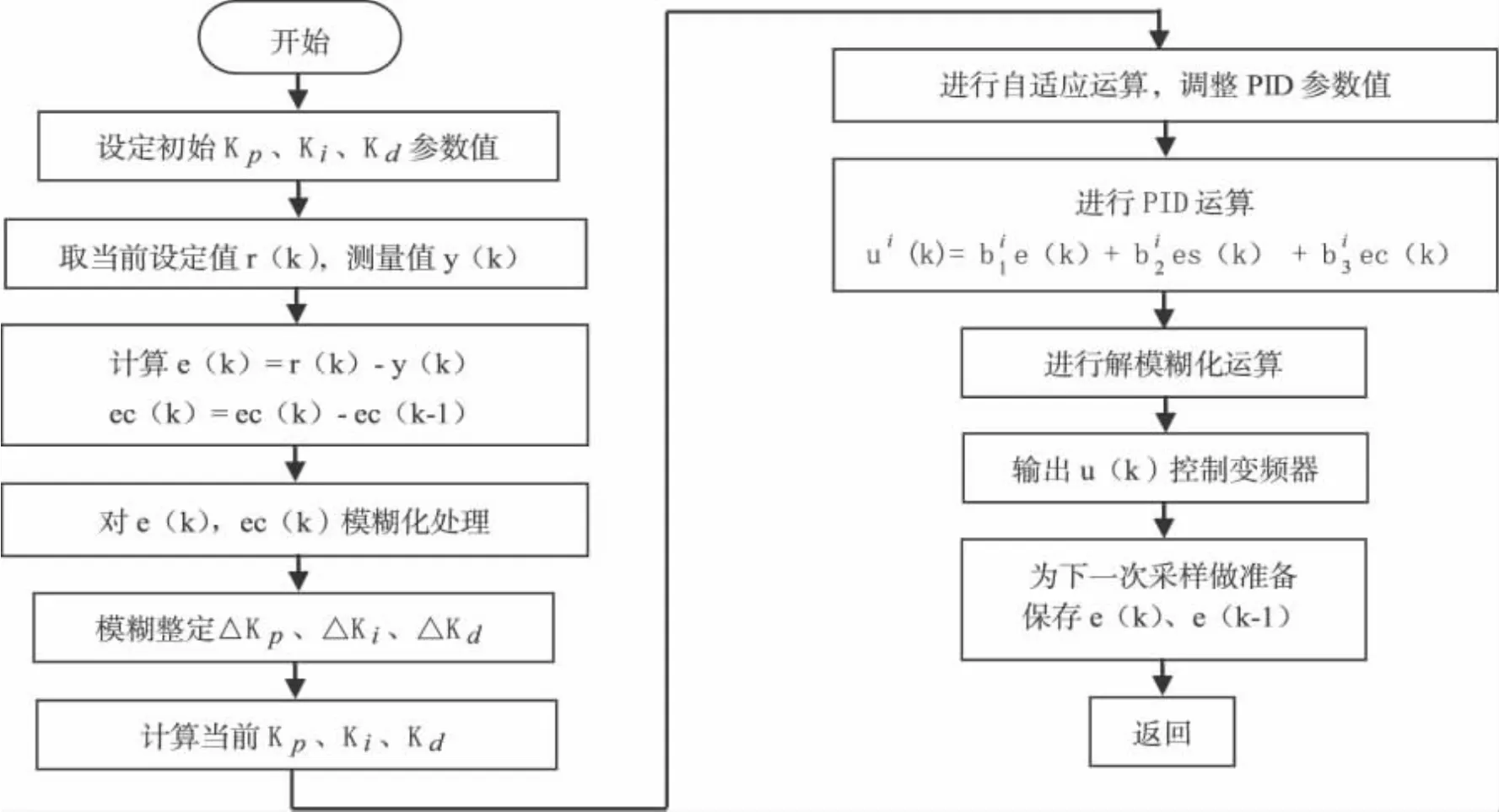
图5 自适应模糊PID算法程序流程图
5 系统仿真及研究
为了比较PID控制、常规模糊控制、自适应模糊PID控制三种控制器的控制性能,通过建立与实际工作情况接近的数学模型,用MATLAB进行仿真研究[9].经过现场数据采集,采用测试法建立了具体的数学模型,分别为:

仿真数据见表1:
通过表1可以看出PID控制无静差,但超调量大,调节时间长;常规模糊控制,超调量较小,调节时间短,且与PID控制相比,对控制对象参数的变化具有更强的适应能力,控制灵活,但存在静差,稳定性差;自适应模糊PID控制集合了前两者的优势,具有灵活性、快速性、智能性的优点,并且稳定性和鲁棒性最好,从而得到了最优的控制品质.
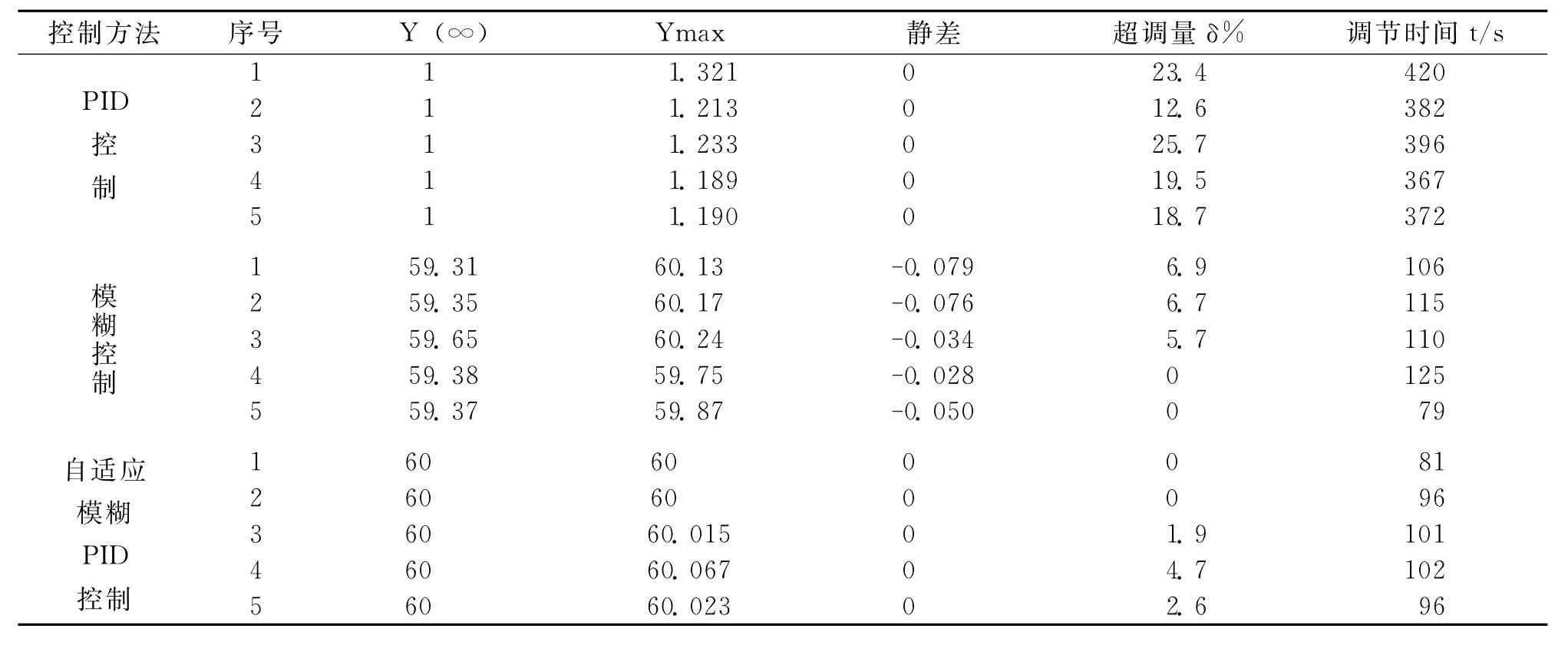
表1 MATLAB仿真测试数据
6 结 语
中央空调是智能建筑中的能耗大户,运用新技术来提高中央空调节能效果对不必要的能耗有着很重大的现实意义.本文介绍了一种自适应模糊PID控制策略,并应用于实际的工程案例,还通过实验数据说明了自适应模糊PID控制拥有比单独的PID控制和常规模糊控制更好的控制性能,能极大地降低中央空调的能耗,具有一定的理论意义和实用价值.
[1] 何耀东,何青.中央空调 [M].北京:冶金工业出版社,1998:1-32
[2] 霍小平.中央空调自动控制系统设计 [M].北京:中国电力出版社,2004:6-13
[3] 陶永华.新型PID控制及其应用 [M].北京:机械工业出版社,2002:56-62
[4] 李士勇.模糊控制、神经控制和智能控制论 [M].哈尔滨:哈尔滨工业大学出版社,1998:53-60
[5] 张曾科.模糊数学在自动化技术中的应用 [M].北京:清华大学出版社,1997:42-45
[6] 黄金才,陈文伟,黄宏斌,等.基于TS模糊神经网络的Fuzzy规则自动获取研究 [J].小型微型计算机系统,2001,22 (05):578-580
[7] 罗梅,贾志娟.模糊自适应参数调整的改进遗传算法 [J].微电子学与计算机,2010,27(04):01-05
[8] 成开友.PLC和变频器在中央空调节能改造中的应用 [J].工业控制计算机,2010,23(07):114-115
[9] 张静.MATLAB在控制系统中的应用 [M].北京:电子工业出版社,2007:56-59
