基于时延差和频分复用的节点定位系统
2012-01-18杜坤坤王志良
杜坤坤,王志良
(1.北京科技大学 自动化学院,北京 100083;2.北京科技大学 计算机与通信工程学院,北京 100083)
利用机器人传感器阵列探索海洋世界一直是科学研究者和普通大众的关注点之一,因此如何准确低定位漂浮在水中的水下机器人基站的位置,成为研究水中通信的重要点之一[1]。利用水下机器人传感器阵列进行定位通常采用GPS定位系统[2]。但是这种方法需要耗费大量的人力物力,而且对于军方来说采用GPS并不十分安全。这时无GPS的定位系统和算法应运而生。这类比较经典的定位系统和算法有:美国麻省理工的Cricket定位系统,瑞士洛桑联邦工业大学的SPA相对定位算法,美国路特葛斯大学的APS系统等[3],三点定位算法[4],最小二乘法[5],并行定位标图方法[6],四面体三维质心定位算法[7]等。文中根据系统的需求,采用无源定位算法,利用多个水下机器人基站采集的信号的到达时间差[7]来实现机器人基站的定位。
1 水下机器人基站自主定位原理
1.1 TDOA算法
TDOA算法定位是一种定位精度比较高,抗干扰能力比较强的定位技术[8],是通过测量机器人基站发射端和接收端之间的传输时延差,进而计算出距离差来实验定位的[9]。
在本系统中,以机器人的个数最少的情况为例,4个机器人基站的传感器P0,P1,P2,P3为例,它们的布局如图1所示,呈四面体分布[10]。设声信号在水中传输的速度为v,所用时间为 tij(i=0,1,2,3; j=0,1,2,3)。

图1 水下机器人基站的坐标Fig.1 Coordinates of the underwater robot base station
由传感器网络布设的几何位置关系,存在下列关系:
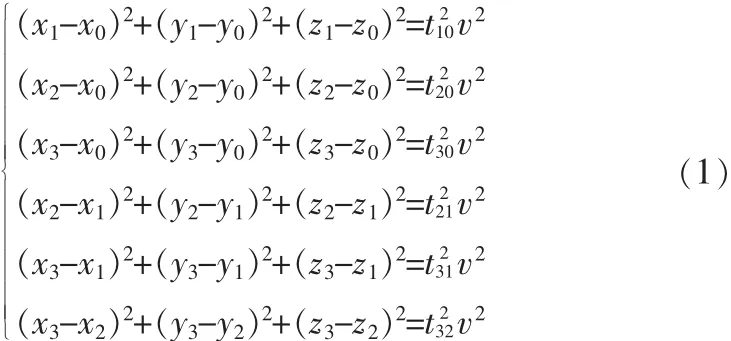
假设P0点为原点,P0P1为横轴建立空间坐标系,则x0=y0=z0=y1=z1=0。解非线性方程组(1)即可得各个传感器位置的相对坐标:(x1,y1,x2,y2,x3,y3)。 其中 tij(i=0,1,2,3;j=0,1,2,3)就是水声自主定位的关键即时间差。如果传感器网络节点越多,解算出的相对位置就越精确;但如果节点过多会有信息冗余的麻烦。
1.2 频分复用
频分复用(Frequency-Division Multiplexing,FDM)是各个节点在发射端发送不同频率的低频声信号,每个信号占据其中的一个频段,由于这些频段互不重叠,因而可在接收时用适当的滤波器将它们分离出来[11]。对于本定位系统来说,就是要把发射换能器的工作频带按一定的频率间隔划分成N个频带,每个传感器网络节点占据其中一个频带[12]。由于各节点的定位信标信号在频谱上互不重叠,因而在接收端可以使用带通滤波器提取各个定位信标信号。
根据被动声纳方程SL-TL=NL-DIR+DT(式中,SL:声源级、TL:传播损失、NL:噪声级接、DIR:接收指向性系数、DT:检测阈值),可以计算出,随着定位系统工作频率的降低其作用距离将会明显的增加。根据水声传感器(发射换能器和接收换能器)的带宽,选择了 5 kHz、7 kHz、9 kHz、11 kHz 4 种频率进行测试。
2 水下机器人自主定位系统的设计
2.1 系统的总体结构
该水中机器人自主定位系统由两部分组成:水上控制中心以及水中机器人基站。其中水上控制中心主要是由无线控制系统对各个机器人基站进行无线控制;水中机器人基站主要由水声信号收发系统和水声换能器基阵组成。文中重点研究水中机器人基站部分,此定位系统的总体结构如图2所示。
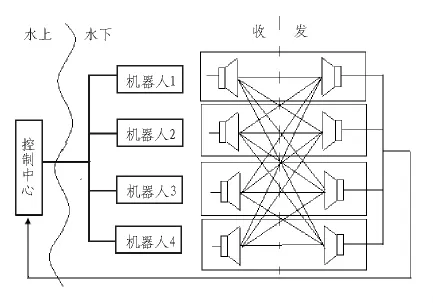
图2 自主定位系统的结构图Fig.2 Diagram of autonomous orientation system
2.2 水声信号收发系统
水声信号的发射和接收都是通过水声传感器来进行的,即发射换能器和接收换能器。现在很多换能器不仅体积小,而且收发功能都集成在同一种换能器中。在进行电声转换前需要有一套信号发射电路,其设计原理如图3所示。而由于本系统中所采用的接收换能器中集成了放大和滤波的信号处理功能,因此接收到的声信号经过声电转换和信号处理后可以直接进行分析使用。
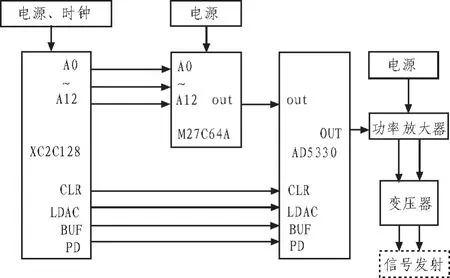
图3 信号发射电路的原理图Fig.3 Circuit schematic of transmitting signals
在发射电路中,利用MATLAB仿真产生波形数据并下载到波形存储器中[13],然后把波形存储器中的信号波形数据读出,并通过D/A转换电路进行数模转换。为了保证传输的距离,转换后的模拟信号需要放大后输出。而为了有更好的频率特性,还需经过匹配电路(变压器),最后信号经过发射换能器进行电声转换。
3 实验结果与分析
以最简单的传感器网络分布为例。实验环境为:静水,深度1 m,设原点为P0点,P0P1设为x轴,则,z0=z1=z2=z3=0,x0=y0=z0=0,声速v已知,利用牛顿迭代法解非线性方程组(1)即可得到各个浮标基站位置坐标:(x1,y1,z1;x2,y2,z2;x3,y3,z3)。
图4表示在基站距离不同时发射和接收的信号,由于信号的拖尾现象,因此一般选取前半部分稳定的几个波形进行计算。
选定两个基站的第二段波形的第三个脉冲的最大值,根据两者之间的点数之差可以得到时间差tij。设声波在水中的传播速度设为v=1 500 m/s。根据公式(1),解方程组就可以得到4个基站的相对位置。这里之所以采用点数之差来计算时间差,而不是采用自相关方式,是由于这种方式算法简单,节约时间和劳力。
设P1P0点数差为 N10,P2P0点数差为N20, 以此类推。P0、P1、P2和 P3节 点 处 的 发 射 信 号 的 频 率 分 别 为 5 kHz、7 kHz、9 kHz、11 kHz,根据奈奎斯特采样频率,数据采集卡的采样频率设为50 kHz。部分实验数据如表1所示。
从表1中可以看到机器人基站定位的误差控制在20 cm以内,经过多次实验证明,误差范围可以控制在30 cm以内。引起此误差的主要原因有:点数之差的计算(由于采样率低导致每差一个点误差增加0.000 02 s)、实际测量距离的准确度、实际声速(与温度有关系)。如果能进一步控制这些测量的精确度,便能进一步的减小定位误差。
4 结 论

图4 P0点信号波形显示Fig.4 Wave display of signal of P0 and P1
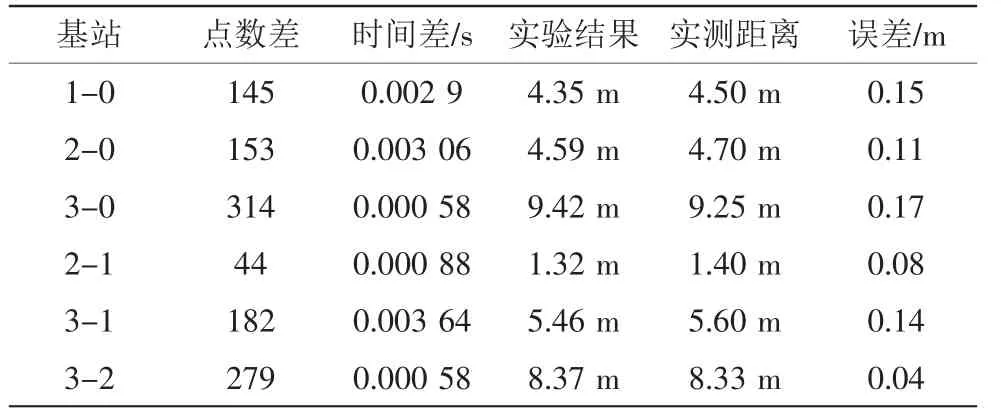
表1 时差定位的实验数据摘选Tab.1 Experiment data of TDOA and FDM
该系统采用时延差和频分复用相结合的模式对漂浮式的无固定点的基站进行了定位,具有经济成本低,隐蔽性强,应用范围广等特点。该实验结果是在水中实现的,在空气中可以采用适当的传感器进行改进,对物联网中物体的定位有一定的参考作用。由于时间关系,文中对时统技术研究的不够深入,添加时统技术的定位系统可以更快捷准确地对物体定位。
[1]周莹.水下无线传感器网络的研究和设计[D].西安:西安电子科技大学,2008.
[2]杜坤坤.水声信号编码与传输特性研究[D].太原:中北大学,2009.
[3]王丹.三维无线传感器网络节点自定位算法研究[D].成都:西南交通大学,2007.
[4]周世宾,郝静如,黄民.基于单片机的水下机器人定位系统[J].传感器世界,2008(9):122-126 ZHOU Shi-bin,HAO Jing-ru,HUANG Min.An orientation system of underwater robot based on single-chip computer[J].Sensor World,2008(9):122-126.
[5]刘利军,韩焱.基于最小二乘法的牛顿迭代信源定位算法[J].弹箭与制导学报,2006,26(3):325-328.LIU Li-Jun,HAN Yan.Newton lterated signal source localization algorithm based on the least squares method[J].Journal of Projectiles,Rockets,Missiles and Guidance,2006,26(3):325-328.
[6]强志庄.水下机器人定位标图并行技术研究 [D].哈尔滨:哈尔滨工程大学,2004.
[7]王长征,汤文亮,徐燕.无线传感器网络中四面体三维质心定位算法[J].传感器与微系统,2012,31(8):141-146.WANGChang-zheng,TANG Wen-liang,XU Yan.3D centroid in-tetrahedron localization algorithm for wireless sensor networks[J].Transducer and Microsystem Technologies,2012,31(8):141-146.
[8]PENG Peng-fei,LUO Hao,LIU Zhong,et al.A cppperative target location algorithm based on time difference of arrival in wireless senor networks[C]//Proceedings of the 2009 IEEE international conference on mechatronics and automation,2009:696-701.
[9]Teachasrisaksakul K,Iemcha-od N.Speaker tracking module for indoor robot navigation[C]//The 2012 9th international conference on electrical engineering/electronics, computer,telecommunications and information thchnology(ECTI-CON).2012:1-4.
[10]周永福.一种TDOA算法的设计[J].计算机光盘软件与应用,2012(6):151-152.ZHOU Yong-fu.A design of TDOA[J].Compter CD Software and Aolications,2012(6):151-152.
[11]王文龙,张艳萍.基于四麦克风阵列的三维声源定位[J].南京信息工程大学学报,2010,2(5):410-413.WANG Wen-long,ZHANG Yan-ping.3D sound localization based on four microphone array [J].Journal of Nanjing University of Information Science of Technology,2010,2(5):410-413.
[12]XING Wen-quan,BAI Jin-xu.Mode classification and calculation in all-solid photonic bandgap fibers[J].Journal of Lightwave Technology,2012,30(6):821-828.
[13]戴萧嫣,韩焱.基于频分模式的水声自主定位[J].微计算机信息,2008,24(1):286-287,309.DAIXiao-yan,HANYan.The autonomous acoustic positioning based on FDM[J].Microcomputer Information,2008,24(1):286-287,309.
