轨道交通闸机系统中的人体识别技术
2012-01-16牛国柱李文文
牛国柱 宋 哲 李文文
(南京理工大学机械工程学院,210094,南京 ∥第一作者,副教授)
闸机作为地铁系统的一个关键组成部分,是专门用来控制乘客通行的装置。乘客在闸机刷卡后,闸机识别系统能分辨出是有效通行还是无效通行,进而准确开、合闸门。乘客能否方便快捷地进出闸机,取决于闸机性能的优劣,这主要与闸机控制系统中的人体识别算法及相关硬件组成、布置相关。
1 乘客通行状况分类
研究人体识别算法,首先要对人体分类。根据行人数量、是否携带物品及人自身的行为特征等,对人体通过闸机通道的情况进行了初步的分类,如表1所示。
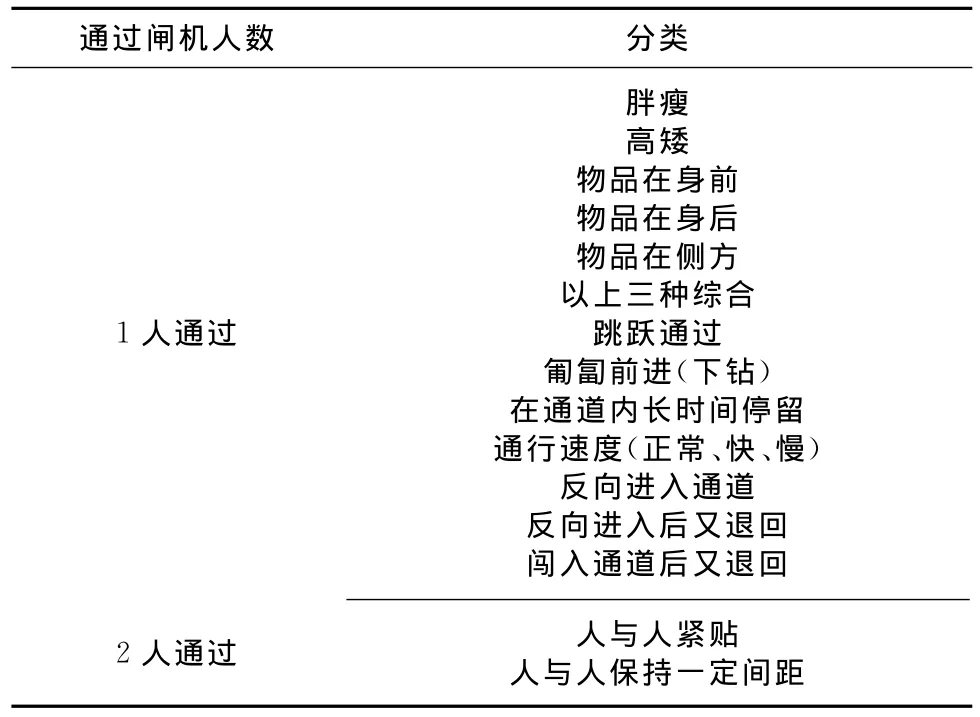
表1 乘客通行情况分类
2 传感器空间位置布局
人体识别通常指人体生物特征识别方法。在闸机系统中,需要对通过行人进行计数。本文中介绍的是通过点式传感器的状态来识别人体。为了合理布置传感器的位置,需要对人体比例结构进行分析。人是通过各个关节将身体各部分联系在一起的,对关节比例的分析即是对人体比例的分析。若把人的身高记为H,那么人体自上而下,肘关节为0.61 H,髋关节为0.47 H,腕关节为0.47 H,膝关节为0.27 H,踝关节为0.045 H[1]。因此检测一个行人,就是要对这些区别于其它物体的人所特有的属性点(称之为关键点)进行检测。
首先确定传感器在垂直方向上的空间布局。地铁闸机通常的尺寸在2 200mm长、1 200mm高左右浮动。而中国男性的平均身高为1 700mm,女性为1 600mm[2]。因此,当人站在闸机中央时,腕关节正好位于闸机的上半边缘处,膝关节处于闸机的中部,踝关节处于闸机的下半边缘。人体躯干移动、四肢的摆动,就是在这几个关节点带动下完成的。据此,可以确定传感器在纵向的大致位置,即腕关节、膝关节、踝关节处。
其次,初步确定传感器在水平方向上的位置。中国人的平均步长为600mm左右,闸机入口距剪式门约1 100mm,故人体行走一步半至两步可到达剪式门。闸机对人体的识别应在这一区域内完成。
3 算法分析
本文将1人、正常胖瘦高矮、不携带物品的通行视为正常通行,将携带物品、2人紧贴、跳跃匍匐、通道内滞留、进入通道后退回视为特殊通行。考虑到特殊通行情况复杂,而正常通行根据人自身特点规律性较强,故算法以检测到正常通行为基准,然后再分别考虑各特殊通行,进而完成对乘客通行状态的判断。
3.1 区域识别
图1所示传感器分布图中只画出闸机的一侧,另一侧与之完全对应。依通行方向将整个闸机分为检测区、安全区和出口。检测区用来检测通行人数;安全区是为了避免夹伤乘客所设置的,传感器检测到乘客位于此区域,阻挡门不会关闭;出口表示乘客通过闸机。

图1 传感器分布图[3]
区域识别思想,顾名思义指通过不同的区域识别行人的思想。人们从一个旧区域进入到另一个新的区域是从无到有的一个无重复过程[3]。例如,图1中传感器S2开始处于无遮挡状态,当人通过时处于被遮挡状态,那么认为人进入了一个新的区域。把围绕传感器S1、S2、S4、S6一圈的部分作为第一个区域,记为“A1”。如果其中任意一个传感器从未被遮挡状态变为遮挡状态,则称人进入了区域A1。记此时A1的状态为“1”,否则为“0”。将S3、S5所围的部分作为第二个区域A2,S7所围区域作为第三个区域A3。那么一个正常通行行为,是A1、A2、A3的一种状态转换(见图2)。

图2 区域识别状态转换图
图2 中,在t1到t2时刻,区域A1的状态出现了0→1的变化;t2到t3时刻,区域A2的状态出现了0→1的变化,且在A2出现0→1变化之后的时刻中A1再未出现0→1的变化。至此可判定有一名乘客通过。
如果对人体的步行特征进行分析,可得到图3所示传感器的布局。人体在步行时总是一条腿作为支撑腿,另外一条作为摆动腿[4]。如此反复交替,如果从外形上看,就是在双腿叉开跨步状态到双腿并拢站立状态的不断交换中行进的[5]。当人的前后两个动作出现差异时,说明人体是在运动的,因此如果要检测行人就需要检测这样一个运动。依据人体行走的两个极端姿态来布置传感器的空间位置。在进入闸机处绘制警示黄线,提醒乘客在闸机外侧刷卡。那么乘客刷卡进入闸机的第一个动作便是跨步状态,由此设置S1、S2、S4作为第一个区域。第二个动作是站立状态,由区域2中的传感器S3来检测。接下来又向跨步状态转移,同样的膝盖与脚踝在前,然后是上身躯干,因此区域3由传感器S5、S6组成。S2、S3传感器兼有检测儿童的功能。当身高不足这一高度的儿童经过时,不计入通行人数计数器中。
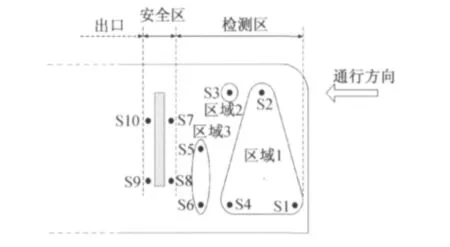
图3 传感器分布图
区域识别思想的关键在于如何有效合理地对传感器位置进行区域的划分。区域识别可以满足检测通过闸机乘客数量的要求,但当后面乘客紧紧尾随前面乘客进入时,闸机会误以为还在同一区域中,并未发生由旧的区域进入新的区域这一情况,故对乘客的计数出错;当与人体外形相似的物体进入时,还会误判为人进入。
3.2 关键点识别
为进一步简化传感器的布局与数量,并保证快速检测通过行人,弥补区域识别的不足,同时更清晰地区分人跟物体,需要找出人所特有的属性。人在行走过程中,人体高度基本不变,宽度有变化但幅度不大,而下半部分腿部变化极为明显。这是由于膝盖带动着小腿做反复摆动。人体腿部运动相当于在平面上绘制了一个扇形区域。分析摆动的过程,膝关节是扇形的顶点,踝关节则是扇形弧上的某几个点,比膝关节更容易判断。因此,应当选取踝关节所处位置作为传感器采集的关键点[6]。
以图4所示S2传感器为例,当人体通过时,由于两条腿的摆动,传感器的状态会呈现“遮挡→未遮挡→遮挡→未遮挡”,记S2状态为“1→0→1→0”。若只使用S2,则乘客的1只脚迈进来之后又退回或者乘客跳跃着进入等极端行为将与正常行为混淆。因此再加入传感器S4、S5。判断时,其中任意2个传感器沿通行方向按照时间先后出现1→0→1→0时,即有1名乘客通过闸机通道。在闸机上端,人体髋关节位置处的S1传感器是为了检测儿童设置的。若S1未检测到信号,则判断是儿童。因为判别行人通过的传感器均位于闸机下方,为防止有人恶意跳跃,设置S3传感器。正常通行时,S2、S4、S5的一种状态转换如图5所示。

图4 传感器分布图
这种传感器布置的方式,可以较好地区分人与物体。若物体经过,传感器的状态会是“遮挡→未遮挡”;若有人尾随通过,会出现2次“遮挡→未遮挡→遮挡→未遮挡”状态。由于将传感器设于脚踝处,这种识别思想可以省去判别人体前、后、侧面背包的情形,简化了判别人体的种类。
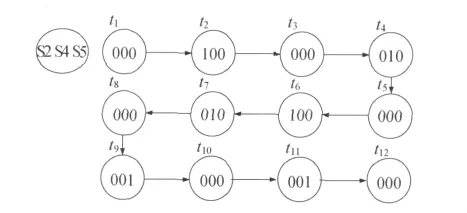
图5 关键点状态转换图
3.3 算法优化
区域识别方法在乘客非恶意逃票时,能够判别通过行人数量。针对人体所特有的下肢关键点设置传感器的方法,能够区分与人相似的物体,也可以提高2人紧贴尾随情况的识别率;但对于穿大衣或者裙子的乘客,由于传感器无法检测到脚踝处的运动情况,会使判断结果出错。因此,可以采用两种算法相结合的思想,互为补充,达到有效判别乘客各种通行行为的目的。
通常乘客在刷卡进入闸机的同时也在向闸机内行走,故闸机首先检测到的应该是人的站立状态(如前所述是膝盖跟脚踝先进入)。图6中S1、S2就是据此布置的。紧接着进入跨步状态,S5、S3是前后脚脚踝处,S4为中间手腕处。这3个传感器构成区域2。乘客再向前就会经过S6所在区域。为了使2个区域的跨度更明显一些(这样可以更容易区分2个不同的动作),S6放在手腕处而不放在膝盖处。S2、S3、S5同时兼做脚踝处3个关键点传感器。

图6 传感器分布图
4 试验及判定结果分析
根据识别算法及状态转换图编写软件。将区域识别和关键点识别结合起来,首先用区域识别的结果进行初步判定,然后再辅以关键点的修正。
本文针对几种典型的通行行为,按图6布置传感器的空间位置,采集行人通过时各传感器的状态,并对结果进行分析。
4.1 单人正常通行
1名乘客正常通过闸机时,各传感器的状态如图7所示。图7中横条表示传感器被遮挡,即状态为“1”,空白处表示未被遮挡,即状态为“0”。首先使用区域识别判断:在t1时刻虚线与横条交汇处,区域A1出现“0→1”的变化,t2时刻,区域A2出现“0→1”的变化,且在A2出现“0→1”变化之后A1再未出现“0→1”的变化,至此可初步判定有1名乘客。再用关键点判断:在t3、t4时刻S3传感器出现“1→0→1→0”的变化,在t6、t7时刻S5传感器出现“1→0→1→0”的变化,故关键点亦判断出1名乘客。则最终结果为1人通过闸机通道。

图7 传感器状态图
4.2 单人携带物品通行
当1名乘客拖拽行李通过闸机通道时,各传感器采集到的状态如图8所示。判定过程同上。区域判定中,A1、A2区域2次先后出现“0→1”,在此之后A1再未出现“0→1”,故判定为2人。关键点判定时,按时间先后,S2、S3传感器出现“1→0→1→0”的变化,可判定为1人。最终认为是1人携带物品通过闸机通道。

图8 传感器状态图
4.3 两人紧贴通行
当2名乘客距离较近通过闸机通道时,各传感器采集到的状态如图9所示。区域判定结果为1名乘客。关键点判定时,按时间先后,在S2、S3传感器出现“1→0→1→0”后,S3、S5传感器又出现“1→0→1→0”,故判定为2人。最终结果为2人紧贴通过闸机通道。

图9 传感器状态图
5 结语
本文分析了地铁闸机系统的区域识别算法,并逐步简化传感器的数量与位置分布,提出了将区域识别和关键点识别相结合的思想。对1人、2人通过闸机的通行行为进行了试验,并对几种典型的通行情况作出试验分析,进一步验证了算法的有效性。这种识别思想在识别率方面有了较大的提高,能很好地防止逃票行为的发生。
[1]朱序璋.人机工程学[M].西安:西安电子科技大学出版社,1999.
[2]于明玖,叶军,陆长德.中国成年人尺寸标准在产品设计中的应用方法[J].江苏大学学报:自然科学版,2006,27(B09):64.
[3]曲日,鲍彦和,任长明.城市轨道交通中闸机事件识别技术[J].中国铁道科学,2006,27(4):112.
[4]何凯,姜昱明.虚拟人行走运动的研究与实现[J].计算机仿真,2005,22(2):139.
[5]Mobasseri B G,Amin M G.A time-frequency classifier for human gait recognition[C]∥ Orlando:The International Society for Optical Engineering,2009:3.
[6]魏国.基于步态识别的离散XYT模型的应用研究[D].天津:天津大学软件学院,2008.
