四旋翼无人机建模及其PID控制律设计
2012-01-15吴成富刘小齐
吴成富,刘小齐,袁 旭
(1.西北工业大学 无人机特种技术重点实验室,陕西 西安 710065;2.榆林供电局清涧分公司 陕西 榆林 719000)
四旋翼无人机是一种具有4个旋翼的飞行器,有X型分布和十字型分布2种。文中采用的是X型分布的四旋翼,四旋翼无人机只能通过改变旋翼的转速来实现各种运动。国外对四旋翼无人直升机的研究非常活跃。加拿大雷克海德大学的Tayebi和McGilvray证明了使用四旋翼设计可以实现稳定的飞行[1]。澳大利亚卧龙岗大学的McKerrow对Dragantlyer进行了精确的建模[2]。目前国外四旋翼无人直升机的研究工作主要集中在以下3个方面:基于惯导的自主飞行、基于视觉的自主飞行和自主飞行器系统。而国内对四旋翼的研究主要有:西北工业大学、国防科技大学、南京航天航空大学、中国空空导弹研究院第27所、吉林大学、北京科技大学和哈工大[3]等。大多数的研究方式是理论分析和计算机仿真,提出了很多控制算法。例如,针对无人机模型的不确定性和非线性设计的DI/QFT(动态逆/定量反馈理论)控制器[4],国防科技大学提出的自抗扰控制器可以对小型四旋翼直升机实现姿态增稳控制,还有一些经典的方法比如PID控制等,但是都不能很好地控制四旋翼速度较大的情况。本文对四旋翼无人机设计了另外一种不同的控制方法即四旋翼的四元数控制律设计,仿真结果表明这种控制方法是一种有效的方法。尤其是对飞机的飞行速度较大的情况,其能稳定地控制四旋翼达到预期的效果。
1 四旋翼的模型
文中所研究的四旋翼结构属于X型分布,即螺旋桨M1和M4与M2和M3关于X轴对称,螺旋桨M1和M2与M3和M4关于Y轴对称,如图1所示。对于四旋翼的模型本文主要根据四旋翼的物理机理进行物理建模,并做以下2条假设。
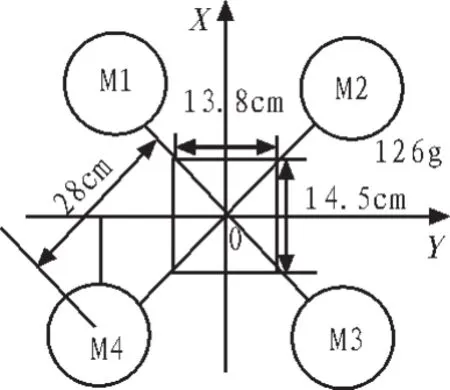
图1 四旋翼外形示意图Fig.1 Structure diagram of the quadrotors
1)四旋翼无人机是绝对的刚体,不考虑其结构和弹性形变,而且机体的重心位置不变,其质量为常数;
2)假设地面为惯性参考系,即假设地面坐标系为惯性坐标系。
利用电子秤测出各个零部件的质量,利用游标卡尺和直尺测出各个零部件的尺寸,应用悬吊法测出其机体的重心。立机体坐标系并求出四旋翼的转动惯量,对于不规则的物体进行必要的简化和等效,对于螺旋桨的建模忽略了其所受的空气阻力和侧向力矩,只考虑螺旋桨的升力和扭矩。
1.1 四旋翼动力学方程
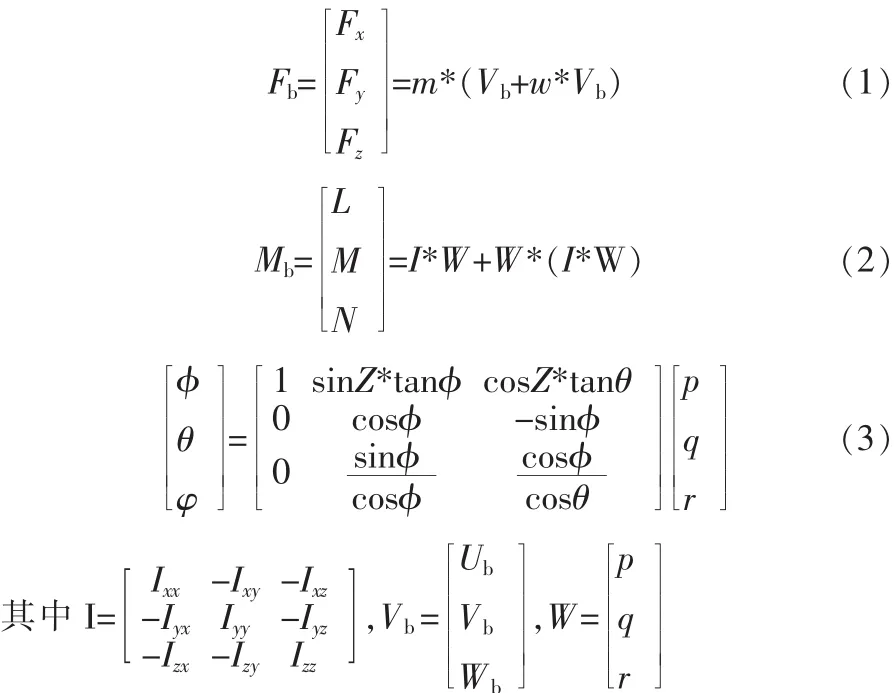
在机体坐标系下的受力与力矩关系式:
1.2 四旋翼无人机动力系统建模
1.2.1 电机动力学模型

有式(6)和(4)可得:

由式(7)和式(5)可得:

其中,JTM为电机的转动惯量,QL为负载扭矩,Q是电机扭矩,V是电机两端电压,I是电机通过的电流,ω是电机转动角速率,Kq,Ra和Ke是电机的特定常数,Kq将电流和扭矩关联,Ra是电机转子的总阻抗,Ke将电机转速关联到电动势[5]。
1.2.2 螺旋桨的模型
文中只考虑螺旋桨沿构造旋转轴的升力T和扭矩Q,忽略其受到的阻力和侧向力矩。这些力或力矩均与旋翼转速的平方(Ω2)成一定比例关系
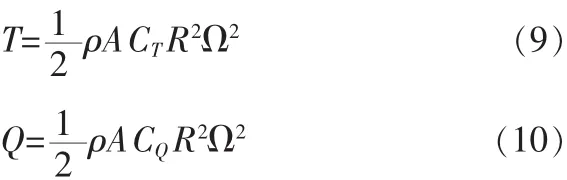
其中,CT,CQ分别为旋翼的拉力系数、阻力系数、扭矩系数和侧倾力矩系数,ρ为空气密度,R为桨叶半径,A=πR2浆盘面积[6]。
2 四旋翼无人机PID控制律设计
2.1 四旋翼无人机PID控制结构
文中的主要目的是基于PID的四旋翼控制问题研究,其最终目标是要验证PID能有效的控制四旋翼在没有重心偏移和有重心偏移下情况下的姿态角和速度。故而首先要对所用的四旋翼飞机进行建模,然后进行控制器的设计,最后进行仿真验证。
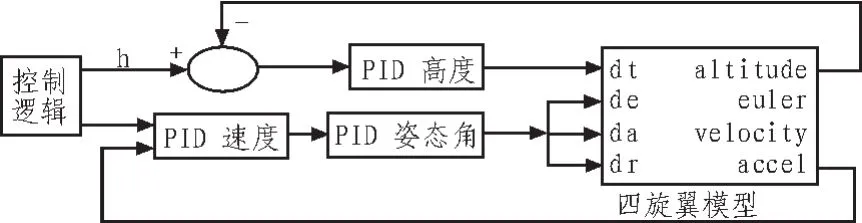
图2 四旋翼控制结构图Fig.2 Structure diagram of the control system
2.2 四旋翼无人机PID控制参数和PID控制器结构图
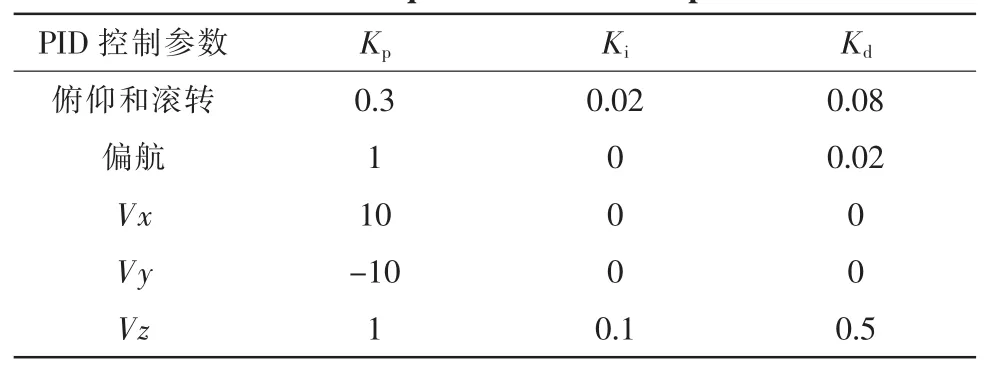
表1 PID和四元数控制参数Tab.1 PID and quaternions control parameter
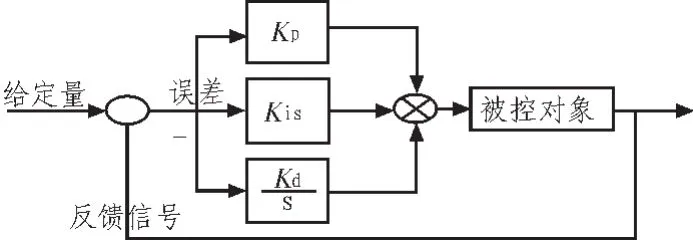
图3 PID控制器结构Fig.3 Structure diagram of PID control
3 实验结果与分析
3.1 在没有重心偏移情况下的控制结果
在没有重心偏移情况下俯仰角和滚转一起控制5度的结果表明pid能有效的控制控制量在很快的时间内达到预期的效果。
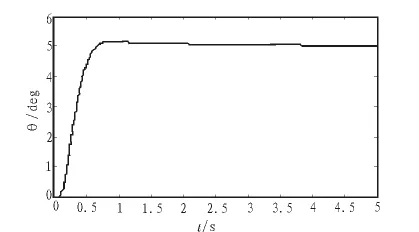
图4 俯仰控制曲线Fig.4 Pitch control curve
在姿态角控制基础上近一步加入速度控制,而且速度控制只是简单的比例控制,实验结果很好。
3.2 重心偏移条件下的控制结果
为了检验PID控制效果,文中对四旋翼的重心进行了偏移,控制结果表明控制量的快速性变差,但是控制依然平滑有效。
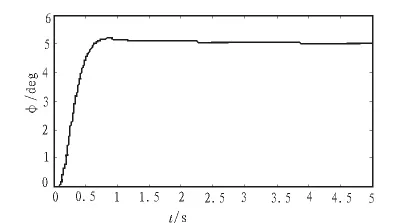
图5 滚转控制曲线Fig.5 Roll control curve
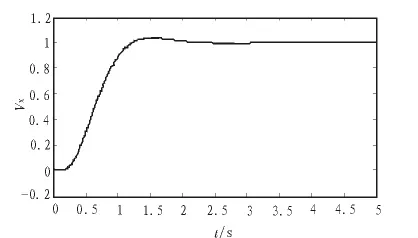
图6 Vx控制曲线Fig.6 Vx control curve
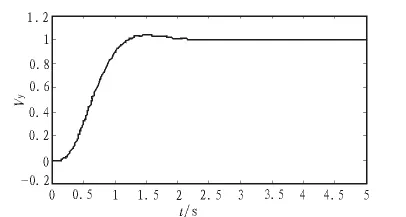
图7 Vy控制曲线Fig.7 Vy control curve
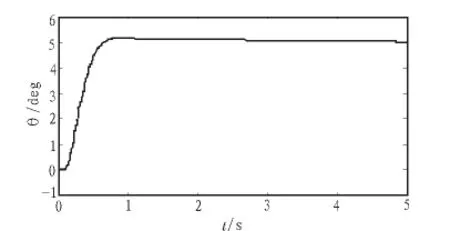
图8 俯仰控制曲线Fig.8 Pitch control curve
4 控制逻辑
为了方便人能更加简单的控制四旋翼,文中加入了控制逻辑。操作者面北朝南,飞机机头可以在你前方的任意一个方向,操作者只要按自己的方位进行前后左右控制。
公式推导:Vxcmd和Vycmd是操作者控制输入。
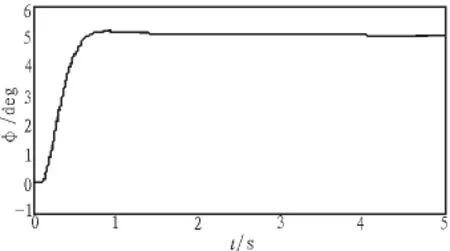
图9 滚转控制曲线Fig.9 Roll control curve
首先将速度分解到飞机所在的地轴系下:

然后将速度转换到机体轴上:

最后将速度送入控制器进行控制。
5 结 论
PID控制器能有效的控制四旋翼无人机的姿态角和速度,而且当四旋翼的重心发生偏移时,虽然控制的快速性有所下降,但控制效果依然满足要求。
[1]Tayebi A,McGilvray S.Attitude stabilization of a four-rotor aerial robot[J].43rd Conference on Decision and Control,2005(12):1216-1221.
[2]Phillip M.Modelling the draganflyer four-rotor helicopter[J].Proceeding of the 2004 IEEE Internation Conference on Robotics&Automation,2004(13):3596-3601.
[3]王树刚.四旋翼直升机控制问题研究[D].哈尔滨:哈尔滨工业大学,2006.
[4]杨明智,王敏.四旋翼微型飞行器控制系统设计[J].计算机测量与控制,2008(16):485-490.YANG Ming-zhi,WANG Min.Design of flight control system for a four-rotor mini rotorcraft[J].Computer Measurement&Control,2008(16):485-490.
[5]Hoffmann G M.Quadrotor helicopter flight dynamics and control:theory and experiment[C]//Navigation and Control Conference and Exhibit,2007:235-255.
[6]Tommaso Bresiciani.Quadrotor bible[D].Lund University,2008.
[7]马兵兵,翟丽婷,孙璐.火箭发动机随机推力调节控制驱动器的研制[J].火箭推进,2012(2):79-82.MA Bing-bing,ZHAI Li-ting,SUN Lu.Research on random thrust adjustable controller of rocket engine[J].Journal of Rocket Propulsion,2012(2):79-82.