机场多普勒天气雷达双机备份技术及可靠性分析
2012-01-05高仲辉郝立勇
陈 宝, 高仲辉, 郝立勇
(1.中国民用航空局空中交通管理局,北京 100125;2.中国电子科技集团公司第三十八研究所,安徽 合肥230088;3.安徽四创电子股份有限公司,安徽合肥230088)
0 引言
天气雷达是机场综合气象观测系统的重要组成部分,是航空运输保障的重要探测设备之一。航空气象服务保障的特殊性要求预报人员做出准确的天气预警预报,空中交通管制人员利用天气雷达实时探测信息,发现和跟踪雷暴位置、强度及变化、移动方位和速度,在天气雷达探测到较弱雷暴的情况下,有的放矢地指挥飞机进离场或绕飞;在雷暴天气特别强烈的情况下,果断地指挥飞机备降或返航。天气雷达探测是恶劣天气下管制调配的重要依据,既保证处在恶劣天气中的航空器的安全,同时又保障了人民生命财产以及航空公司和机场的经济效益免遭损失。因此,航空运输安全保障要求天气雷达在任何条件下都能连续、稳定、可靠地运行。
中国现役航空天气雷达系统几乎全部采用单机体制,一旦系统出现故障,极易造成停机,结果将严重影响航空运输的气象保障。美国FAA列装在机场的终端区多普勒天气雷达(TDWR)除了雷达天馈系统、伺服系统为单机体制外,其主体组成部分(发射机、接收机、信号处理器、远程遥控终端主机等)采用双机体制,并实现自动切换[1]。航管二次雷达采用了相似的结构,以保证工作的稳定可靠。双机备份技术是增加系统可靠性、增强机场气象保障能力的重要手段[2]。
1 双机备份技术设计思路
机场多普勒天气雷达由天馈分系统(含天线罩、天线转台和馈线)、发射分系统、接收分系统、信号处理分系统、监控分系统、伺服分系统、数据处理与显示分系统(也称终端分系统)以及配电分系统等组成[3]。
双机备份技术即除了天馈系统、伺服系统为单机体制外,主体部分(发射机、接收机、信号处理器、远程遥控终端主机)采用双机体制,各分系统包括两套独立的设备,互为冗余备份,可在监控系统冗余控制板的控制下进行自动重组、无缝切换,并可在线维修,实现MTBCF≥10000小时[4]。
天气雷达在总体设计思想上,采用目前国内外最新且成熟的雷达技术、计算机技术和网络通讯技术;在软件设计上,融合气象专家多年的宝贵经验,结合民航气象部门的使用特点;在应用目标上,满足中华人民共和国民用航空行业标准,适合民航机场保障要求[4]。
随着业务应用的发展,终端系统的软硬件具有持续的可升级和再开发能力。天气雷达操作简便,设置便捷,维护方便并具有较高的可靠性、稳定性和可维性,拥有完善、稳定的安全保护措施,具有无人职守全天候连续工作的能力和良好的环境适应性。整个雷达系统可在本地(雷达站)和远程(气象台)具有功能相同的控制、产品显示和测试维护能力。
2 双机备份雷达系统组成及基本工作原理
2.1 系统组成
天气雷达整机在总体布局上分为天线单元、主机单元、终端单元3部分。这3个部分分别安置在雷达塔顶、雷达站主机房和航管楼气象台内。
天线单元为室外设备,主要包括天线罩、天线反射面、室外馈线、天线转台等设备。为保证安全,天线单元安装避雷装置和航空障碍灯。
主机单元主要包括两个发射机柜、两个接收机柜,放置在雷达主机房内。同时还包括一些馈线及辅助设备。
终端单元主要包括雷达数据处理服务器、控制维护工作站、预报工作站、用户终端、网络交换机等硬件设备和在其中运行的软件系统。
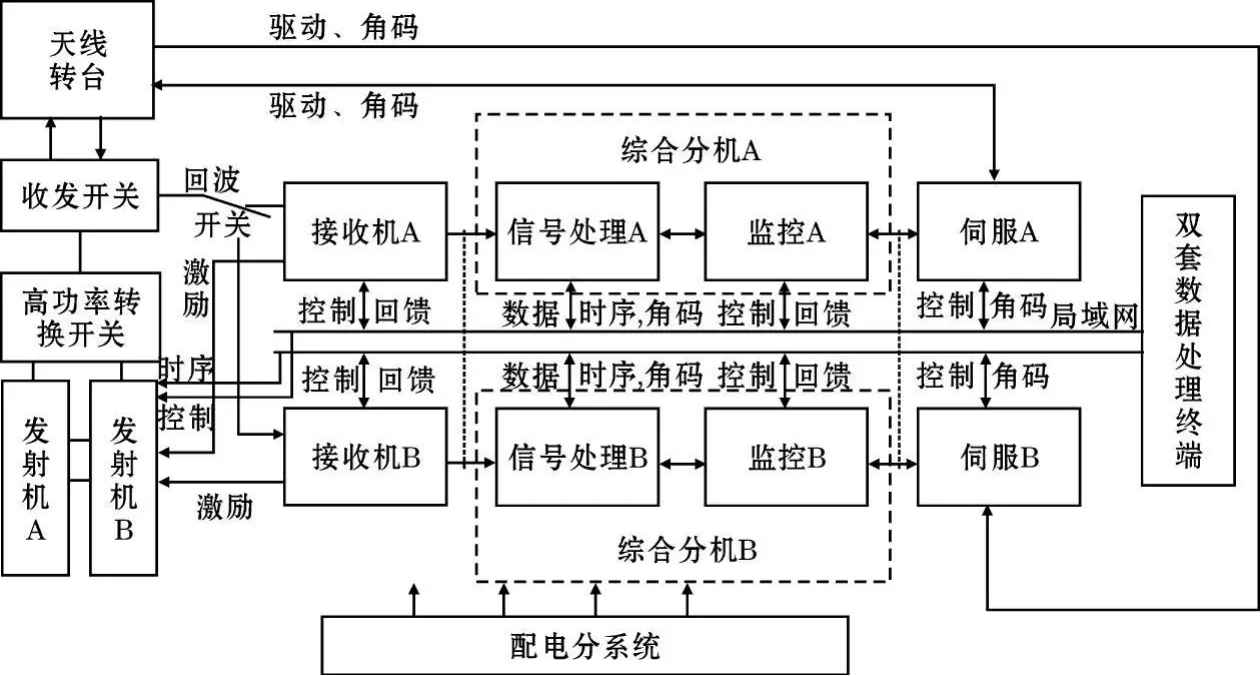
图1 天气雷达组成框图
2.2 基本工作原理
天气雷达为全相参多普勒天气雷达,即雷达的发射信号、本振信号和相参基准信号都是由一个高稳定度和高纯度的主振源同步产生,之间保持着严格的、固定的相位关系。雷达通过发射高功率的微波脉冲信号,借助于云、雨等气象目标的后向散射检测、分析和确定降水目标。根据回波信息,测量其强度以及运动的径向速度和谱宽[5]。雷达整机的工作过程简单描述如下。
接收分系统中的激励源输出频率遥控可改变的射频激励信号,送入发射分系统,经固态功率放大器后,进入速调管放大,在系统监控系统的控制下,选择一套发射机处于高压工作,输出峰值功率大于250kW的射频脉冲信号,经过馈线到达天线向空间定向辐射。天线定向辐射的电磁波遇到云、雨等降水目标时,便会发生后向散射,形成气象目标的射频回波信号被天线接收。
接收到的微弱射频回波信号,经过馈线送往接收分系统。接收分系统的同轴射频冗余开关,在雷达监控系统的控制下,将回波信号送至任一接收通道,经过两路射频放大和变频(高灵敏度通道和低灵敏度通道),成为60MHz的中频回波信号,送至数字接收机直接进行中频采样。
中频接收分机为高性能的数字中频接收机,在结构上与信号处理器、监控板及冗余控制配置在综合分机中。在监控系统的控制下,选择处于工作状态的接收机的中频信号,进行处理后输出两路16位I、Q正交信号,通过光纤送往信号处理分系统。
信号处理分系统将两路I、Q正交信号,作平方律平均处理、地物杂波对消处理,和拼接处理后,得到反射率的估测值;并通过脉冲对处理(PPP)或快速傅里叶变换(FFT)处理,从而得到散射粒子群的平均径向速度 V和速度的平均起伏即速度谱宽W。并将处理后的回波数据及GPS传入的时间,以TCP/IP协议格式传输至终端系统。
监控系统包括监控板和冗余控制板,负责对雷达全机的监测和控制。自动检测、搜集雷达各分系统的故障信息和状态,送往终端分系统。并将终端分系统发出各种控制指令和工作参数指令,转发至各相应的分系统,完成相应的控制操作和工作参数设置。同时,监控系统是双备份系统设备切换的控制中心,雷达正常运行时,监控系统发出初始化指令,将各分系统的主通道设备设置为工作状态,备份通道处于热备份状态,当某一设备发生故障时,监控系统自动检测故障信息,并根据故障信息自动切换至相应的备份通道,并控制其他相关系统或开关器件,完成系统设备自动重组,保证系统正常运行;同时隔离故障设备,实现故障设备在线维修功能。
伺服分系统接收监控系统的控制指令,完成天线方位和俯仰扫描控制;同时将天线的实时方位角、仰角数据送往信号处理分系统。伺服分系统中的伺服分机及驱动电机、角度传感设备为双套独立系统,两套系统同时在线工作,驱动电机可通过超越离合器脱离啮合或进入啮合状态。
终端分系统对于信号处理分系统的雷达探测气象目标回波的原始数据、天线角度信号,以及GPS时钟进行采集、处理,以PPI、RHI、体扫等工作方式,实时显示回波图像,并将数据存储,自动生成航空气象保障所需的各种天气预报和天气监测用的图像、图形、曲线等气象产品。软件设计满足两套以上主/备方式在线工作,并通过网络互相访问和监测软件运行情况,实现互为备份。
3 各分系统技术方案
3.1 发射分系统
雷达发射分系统采用全相参速调管放大链式工作方式,包含两套相同的发射机,互为冗余备份,可以在线维修。发射机A正常工作,发射机B开机预热,处于准加状态,波导开关选通发射机A的功率输出,将大功率脉冲信号通过馈线传输至天线再辐射到空间;当发射机A出现故障时,A发射机高压自动跳闸并与故障连锁,此时雷达监控系统自动控制大功率波导开关选择发射机B输出,同时发射机B受监控系统控制开始加高压工作。
3.2 接收分系统
接收机分系统是全相参、超外差二次变频式数字化接收机,具有大动态、低噪声、灵敏度高等特点。采用冗余结构设计,包含两套独立的接收分机和同轴冗余开关,每套接收分机包括接收通道分机、频率源分机、激励源分机;两套接收分机单独供电,设备故障时可在线维修;另外设计标定/BIT分机实现系统自动标校和故障检测。
具体工作过程为:来自天线的回波信号经TR管和PIN开关保护后,由同轴电缆送至接收分系统的冗余开关,开关在监控系统的控制下,选择回波信号进入接收机A的接收通道分机(或接收机B的接收通道分机)。为了防止非同步强干扰信号对接收前端的损伤,在低噪声放大器(LNA)的前面还装有限幅器,经过低噪声放大器放大后分为两路信号,两路信号分别进入高灵敏度通道和低灵敏度通道,在各自接收通道内进行放大、两次下变频,然后送入双通道数字中频接收机,直接进行相位检波和A/D采样,得到两路I/Q信号,送信号处理系统。
3.3 信号处理分系统
信号处理分系统采用模块化设计,所有的功能均由一块插件完成。结构设计与数字接收机、监控板、冗余控制插件共同配置在综合分机中,系统采用冗余结构设计,配置两台互为冗余备份的综合分机。
系统对接收分系统输出的两路16位数字I、Q信号首先进行数据格式转换,以便与DSP进行正确数据接口。I、Q信号经过DVIP处理得到气象目标的强度估值,经过FFT/PPP处理得到气象目标的平均多普勒速度和速度谱宽。然后对两路信号进行拼接处理后输出至数据缓存接口,最后数据以标准TCP/IP协议输出。两路信号处理输出数据以网线形式进入综合机柜的HUB,再传输到终端系统;两路信号处理数据的输出受监控系统的冗余控制插件控制并连锁,实际工作时同一时间只有一路信号处理输出有数据,另一路输出网络接口受控截止。
3.4 伺服分系统
伺服分系统根据控制指令的要求,控制天线作各种模式的扫描运动,同时向信号处理器提供天线的方位、俯仰角度和天线状态信号,并向监控分系统回馈伺服分系统的故障信息。雷达选用全数字式交流伺服系统作为驱动装置,采用旋转变压器和R/D变换模块作为位置监测元件,各种扫描方式均用软件控制完成。整个系统具有控制灵活、体积小、重量轻、可靠性高和电机免维护等特点。
系统亦采用冗余结构设计,主要由伺服分机和配置在天线转台中的电机、减速机、超越离合器、旋转变压器等组成,其中伺服分机和电机、减速机、超越离合器等驱动装置及旋转变压器角度传感装置均采用双备份设计,组成两套独立的控制、驱动及角度检测系统。在天线正常运转的情况下,可以将任一驱动电机通过超越离合器脱离啮合或进入啮合状态,以支持驱动机构的在线维修。通常天线转台只需使用一台电机驱动,两套驱动设备可以轮换工作;但在特殊条件下,也可使用两台电机同时驱动。
3.5 数据处理与显示分系统
系统采用一个高速局域网进行互连,按照安装地点分为雷达楼(雷达站)、航管楼气象台两个组成部分,两地间用千兆单模光纤相连接,雷达终端组成框图如图2所示。
3.5.1 雷达楼主要设备
(1)数据处理服务器:由互为备份的两台品牌服务器组成,负责回波数据接收、气象产品的生成和所有资料的保存。
(2)控制维护工作站:由互为备份的两台品牌工作站,主要负责雷达设备的控制、主要工作参数的监测、日常维护维修等。
(3)网络交换机:完成雷达楼网络和航管楼网络的链接,组成局域网。
3.5.2 航管楼气象台主要设备
(1)预报工作站:负责雷达设备的工作任务设置,所有资料的存储、发布和查阅。
(2)用户终端:品牌商用计算机,负责所有资料的查阅。
(3)交换机:完成雷达楼网络、气象楼网络和航管楼网络的链接,组成局域网。
3.5.3 终端软件组成
软件部分包含数据处理软件、数据服务软件、控制维护软件、预报工作站软件、数据浏览软件5个部分。数据处理软件和数据服务软件运行在数据处理服务器上,控制维护软件运行在控制维护工作站上,预报工作站软件运行在预报工作站,数据浏览软件运行在用户终端上。控制维护软件和预报工作站软件均具有远程工作能力。各软件之间通过TCP/IP网络互相连接,相同软件可同时在两台以上终端设备上运行,但同一时间只有一台具有完全控制功能,其余为热备份状态。各软件之间通过网络互相传递信息,当某一软件故障时,备份软件可自动开始工作。
可见,系统软件的核心功能是实现两套互为热备的控制系统的协调管控,以确保系统对外的控制功能具有在线热备的功能,概括起来,软件设计具有以下功能特点:
(1)高速性:系统软件满足高速运行,对外实现精准的数据、状态采集与控制,并在主控单元崩溃失效后,以较短的时间,完成主备用软件系统的自动切换。

图2 雷达终端组成框图
(2)同步性:两套互为主备的软件控制系统保持相互运行的同步性要求,并在主备角色切换时,确保对硬件设备的输出控制平滑无扰动,这一点,单纯从完全对称的硬件结构设计是无法保证的,必须做出针对性的软件任务调度设计和数据同步方面的处理。这也是整个系统软件的核心所在。
(3)对称性:系统设计不仅需要实现硬件方面的对称性,而且需要实现纯粹的软件对称、同一性,即两套软件控制系统
内部软件完全一样。这是在系统时间投运后,用户得以正常进行日常软硬件维护工作的客户要求[6]。
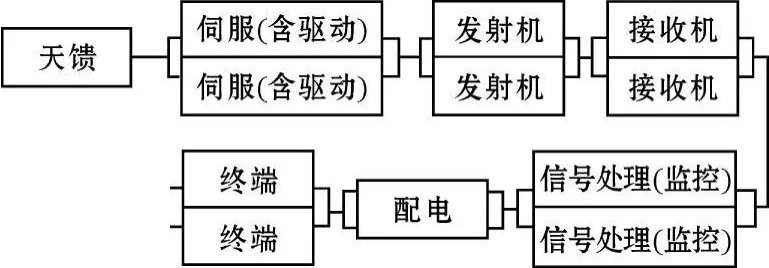
图3 雷达可靠性模型框图
4 系统可靠性分析
雷达的可靠性指标为 MTBF≥600小时,MTTR≤30分钟。因而,对应的雷达系统可用度为 A=0.999961[7]。具体的系统可靠性(MTBCF)估算如下:
天馈MTBCF1=30000小时,MTTR1=0.2小时
伺服MTBF2=5000小时,MTTR3=0.45小时
伺服系统有两套互为冗余的伺服分机及驱动机构,允许一套伺服分机及驱动机构故障的系统可靠性为:

发射MTBF3=1700小时,MTTR3=0.62小时
发射分系统有两套互为冗余的发射分机组成,允许一套发射分机故障的系统可靠性为:

接收 MTBF4=4800小时,MTTR4=0.45小时
接收分系统有两套互为冗余的接收机组成,允许一套接收机故障的系统可靠性为:

信号处理MTBF5=6000小时,MTTR5=0.35小时
信号处理器与监控分系统(监控板、冗余控制插件)共同配置组成综合分机,系统有两套互为冗余的综合分机,允许一套综合分机故障的系统可靠性为:

配电系统MTBCF6=24000小时,MTTR6=0.27小时
终端MTBF7=37000小时,MTTR7=0.21小时
终端系统硬件及软件均以双套系统进行配置,互为冗余,允许一套故障的系统可靠性为:

根据以上各分系统的任务可靠性及维修性预计指标,雷达系统可达到的任务可靠性指标估算如下[8]:

5 结束语
随着民航运输业的高速发展,雷暴、风切变、台风等危险天气对飞行安全的影响日益突显。天气雷达已成为气象预报员发出风切变警报的主要依据,已成为空中交通管制的运行决策辅助工具,为飞行、管制部门提供更准确的危险天气预警信息。针对机场气象雷达的这种应用特点和要求,设计了这种基于双机备份技术的雷达运行方案,方案中雷达各分系统分别包括了两套独立的设备,互为冗余备份,可在雷达监控系统控制下进行自动重组、无缝切换,当某雷达设备系统出现故障时,可以自动或者手动地切换到对应的非故障系统,使雷达连续地输出观测数据,为飞行安全提供保障。结果表明,雷达系统的可靠性得到了提高,而维修保障费用则相对降低。
[1] Weber,M E,Cho,et al.Analysis of Operational Alternatives to the Terminal Doppler Weather Radar(TDWR)[R].Project Report ATC-332,MIT Lincoln Laboratory,Lexington,MA,2007:23-28.
[2] 顾春平.空中交通管制监视新技术简介[J].现代雷达,2010,32(9):1-5.
[3] MH/T 4016.5-2004.民用航空气象第5部分:设备技术要求[M].北京:中国民用航空总局,2004:4-9.
[4] 游志胜,张麟,朱敏.新一代空中管制系统中关键技术的研究成果介绍[J].中国科学基金,2002,(5):303-305.
[5] 丁鹭飞,耿富录.雷达原理.修订版[M].西安:西安电子科技大学出版社,1997.
[6] 张晓黎,吕歆.组件技术及适应性叠覆组件改造技术在提高代码重用性方面的研究[J].计算机应用研究,2004,21(5):75-77.
[7] 杨秉喜.雷达综合技术保障工程[M].北京:中国标准出版社,2001:429-479.
[8] 董宝童.任务可靠度的估算分析[J].飞机设计.2002,(3):49-52.
