一种新型节流压力控制系统原理及试验
2012-01-03刘刚常鑫刘志国赵永斌
刘刚,常鑫,刘志国,赵永斌
一种新型节流压力控制系统原理及试验
刘刚1,常鑫1,刘志国2,赵永斌1
(1.中国石油大学石油工程学院,山东青岛 266580;2.北京师范大学核科学与技术学院,北京 100875)
针对基于PID和比例伺服阀的控制装备存在过冲、反应时间长等问题,研发基于PLC和高速开关电磁阀的节流压力控制系统。介绍系统的主要组成及功能,建立压力控制数学模型,分析系统动态响应特性,并通过压力控制试验和压力阶跃试验检验系统的灵敏度与可靠性。结果表明:压力控制误差在±0.3 MPa以内,压力跟随效果优异;在改变控制压力和流量的试验条件下系统具有较高的灵敏度和可靠性。
节流压力;高速开关电磁阀;数值仿真;试验
节流压力控制系统在油气井压井、欠平衡钻井及控压钻井过程中有着广泛的应用,它主要通过调节节流阀开度来控制井筒压力[1-4]。以往研发的节流压力控制系统采用PID+比例伺服阀的控制方式[5],此类系统易产生压力过冲导致井筒压力波动,难以满足精细控压钻井及窄密度窗口地层的压力控制需求。笔者采用高速开关阀+PLC+间歇脉冲的控制方式,设计一种新型的节流压力控制系统。
1 系统整体设计
控制系统主要包括信号采集与显示(传感器与计算机)、电液控制系统(PLC控制器与电液转换元件)、执行装置(液压执行元件与液动节流阀)与控制软件4部分(图1)。系统通过比对传感器采集到的实际压力数据与设置控制压力数据的差异,指令高速开关阀与换向阀的动作,实现对液动节流阀运动方向及开关时间的调节,完成自动控制节流压力的目标。
1.1 信号采集与显示
为了解工艺过程中主要参数的变化,需要对表征被控对象特征的关键参数进行采集和显示,该部分由传感器、PLC、工控机、连接电缆等组成(图2)。

图1 节流压力控制系统主要组成Fig.1 M ain com ponen ts of throttle p ressure control system
系统采集的钻井参数包括:①立管压力、套管压力、分离器出口压力、油源压力;②分离器出口气体流量、分离器出口液体流量;③一号节流阀开度、二号节流阀开度;④一号泵冲、二号泵冲、三号泵冲;⑤钻井液出口温度。
数据显示:①将采集的各路传感器信号通过PLC扩展模块EM231进行A/D转化后进入PLC进行处理;②PLC利用RS-232与工控机通讯,通过组态软件将各路参数显示到控制系统电脑屏幕上;③通过局域网将各路采集参数传送到其他计算机,使得钻台及钻井监督等区域的主要人员能够实时观测相关参数变化。
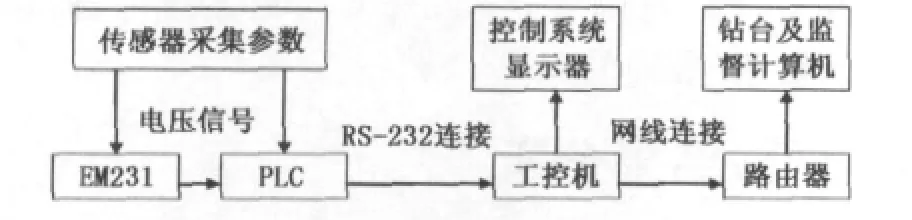
图2 数据采集、传输及显示流程Fig.2 Flow chart of data acquisition,transm ission,display
1.2 电液控制
可编程控制器PLC作为节流压力控制系统的核心控制器对压力变化做出反应,对传感器采集到的数据和设定值进行比较,根据压差控制高速开关阀与换向阀的动作,以控制液压回路中液压油的流向与流量,实现自动控制液动节流阀开关和控制节流压力的目的。
1.3 执行机构
利用液压系统提供的液压能,通过电液转换元件控制进出液动节流阀液压缸的液压油流量,控制液动节流阀液压缸活塞杆的位移改变液动节流阀的钻井液通道开度,通过控制井口回压,达到控制井筒压力的目的。
1.4 控制软件
系统的控制软件由PLC控制程序及力控组态程序构成,其主要作用是:①利用PLC完成对采集信号的处理并传至组态软件;②通过界面实现控压钻井关键参数的实时数据及曲线显示;③利用PLC实现实际数据和目标数据比较、分析和控制电液转换元件工作;④系统具有多重自动保护功能,实施危险操作和参数超限的自动报警和控制。
2 压力控制模型
节流压力控制原理见图3。

图3 节流压力控制原理简图Fig.3 Princip le diagram of throttle p ressure control system
2.1 基本原理
用PLC输出导通时间为Δt的脉冲来控制高速开关电磁阀的开闭,使液压油流量产生变化ΔQA,导致双向液压缸高压腔的流体体积发生改变,从而推动活塞移动Δl,带动液动节流阀的运动使液动节流阀钻井液出口面积变化,进而改变流经节流阀的钻井液的流阻,使控制压力产生Δp的变化。
2.2 假设条件
(1)设液压源的供油压力为ps,由于管路较短,忽略其沿程摩阻损失。
(2)高速开关电磁阀运行周期为T,在Δt时间内导通[6]。
(3)三位四通电磁换向阀在整个液压系统当中只起到改变液压油流向的作用,在收到换向信号后处于全开状态,对所输入的液压油流量不产生影响。
(4)选取液动节流阀为锥形阀[7]。
(5)因为阀杆密封和液压缸活塞摩擦以及阀心自身重力的问题,要求液压缸推力Fy≥KF,K取1.1~1.2。
2.3 控制方程
根据上述基本原理和假设条件可以建立如下的控制方程组:

式中,ps为液压油源压力,MPa;p1和p2分别为高速开关阀入口和出口压力,MPa;p3和p4分别为三位四通电磁换向阀入口和出口压力,MPa;p6为液压源油箱压力,MPa;pm为节流阀入口压力,MPa;pn为节流阀出口压力,MPa;pA为液压缸A腔压力,MPa;SA为液压缸A腔压力作用面积,m2;SB为液压缸B腔压力作用面积,m2;Ap为流通面积,m2;ASA为三位四通电磁换向阀m→n路全开时的面积,m2;ASB为三位四通电磁换向阀o→p全开时的面积,m2;d0为液压缸活塞直径,m;d1为节流阀出口直径,m;d2为锥形阀心最大直径为液压缸活塞位Δl移,m;F为节流阀轴向作用力,N;Δt为导通时间,s; ΔQ为导通时间内注入的液压油流量,m3/s;Cd为开关阀的流量系数;Cq为节流阀流量系数;Cv为返出钻井液流量系数;α为锥形角,rad。
3 系统动态响应特性
控制系统主要由压力传感器、高速开关电磁阀、三位四通换向阀、液动节流阀等组成。由于高速开关电磁阀的启闭延迟效应,可将其简化为一个一阶惯性环节,其传递函数为

式中,τ为占空比,s;s为拉氏变换量;KQ为增益系数。
液动节流阀是一个阀控液压缸直线位移控制系统,可近似认为是振荡环节,根据流量连续性原理可以确定液压缸两腔的流量连续方程与活塞上的力平衡方程,忽略其弹性影响,得到液压缸的输出位移Gs,其拉氏变换为

式中,ωn为无阻尼振动频率,Hz;ξ为液压阻尼比。
压力传感器的时间常数一般很小,所以检测反馈环节可将其看作比例系数为Kf的比例环节[8-11]。
依据图3压力控制原理简图,建立系统的闭环传递函数方框图(图4)。

图4 系统闭环传递函数方框图Fig.4 Closed-loop transfer function block diagram
其中,液压系统的ωn=80 Hz,ξ=0.2,占空比τ =0.1 s,系统开环增益Kv=1,Kf为传感器增益。
利用Matlab/simulink软件绘制系统的单位阶跃响应,得到系统的上升时间tr=0.1 s;调节时间ts=0.6 s;计算超调量σ=22%。可见系统能够满足稳定、迅速、准确的要求。
4 试验结果分析
2010年8月26日至9月2日在中海油服天津塘沽基地,对节流压力控制系统的参数指标及可靠性进行了试验。本次试验的工况:采用固井泵转速为900~1400 r/min,常用试验排量为1200 L/min;液动节流阀阀芯直径Φ50 mm,45°锥面长度10 mm,100%开度时阀芯位移50 mm。
4.1 可靠性验证
评价系统可靠性的一个重要指标就是判断节流阀产生的压降是否接近标准值。采用理论计算和数值模拟两种方法求解节流阀开度与压降曲线,并将其与实测曲线进行比较。
(1)理论计算。节流阀压降计算可由如下经验公式求解[12]:

(2)数值模拟。根据实际节流阀结构用Pro/E建立三维CAD模型,使用面向CFD的前处理器软件Gambit对内部流道进行网格划分,在Fluent软件中采用求解压力耦合方程组的半隐式SIMPLE方法求解,紊流模型采用标准k-ε方程[13]。
(3)结果分析。根据试验记录数据,得到节流阀开度压降关系曲线以及数值拟合模型。将节流阀理论压降计算结果、CFD软件数值模拟结果和试验拟合结果进行对比,见图5。由图5可以看出:3条曲线吻合良好,其中试验拟合结果与理论计算结果的最大相对误差小于19.3%;试验拟合结果与仿真结果的最大相对误差小于12.2%,可见系统的控制精度较高,控制效果趋近标准值,说明该系统具有较高的可靠性。

图5 节流阀开度与压降关系曲线Fig.5 Variation of pressure drop with throttle opening
4.2 压力控制试验
为了评价系统跟随目标压力的效果,进行了压力控制试验,结果见图6。试验中,将控制套压从1 MPa依次提高至7 MPa。
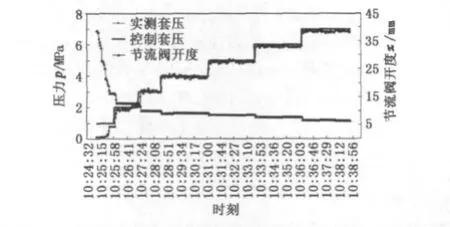
图6 压力控制试验Fig.6 Test of pressure control
从图6可以看出,控制过程中,系统反应迅速,节流阀开度逐渐减小,当压力值达到压力控制精确度范围后,节流阀停止动作。整个控制过程压力平稳,无过冲现象出现,压力波动为±0.3 MPa。由此可见,系统具有较好的压力跟随能力。
4.3 压力阶跃试验
为了评价系统在节流阀流量和控制压力发生较大改动时系统的控制敏感度和反应速度,进行了变排量(800~1 200 L/min)和变控制压力(0.5~7 MPa)试验,结果见图7。试验中在900~1400 r/min随机改变泵转速,不断随意改变泵排量的前提下,将控制套压由7 MPa降到2 MPa再提升到6 MPa,又降到0.5 MPa的变压力试验。从图7可以看出:节流阀在系统的控制下反应迅速,控制压力能够以较快速度达到控制要求,且很快趋于稳定;压力稳定后,节流阀开度基本不发生变化,压力控制准确,没有出现过冲现象。

图7 压力阶跃试验Fig.7 Test of pressure step
5 结论及建议
(1)以PLC+高速电磁阀开关的控制方式,提高了节流压力控制系统的控制精度,更好地满足了井筒压力控制反应速度,控制过程稳定。
(2)系统控制效果趋近标准值,压力控制误差在±0.3 MPa以内,压力跟随效果优异,在快速改变控制压力和频繁变化流量时仍具有较高的灵敏度和可靠性。
(3)系统的体积小,设备占用空间小,为海上平台面积受限条件下的控压钻井实践提供了手段。
(4)系统的制造成本低,可明显降低油气井节流压力自动控制设备的服务成本,适合于低成本控压钻井施工的需要。
[1]RACHEL Johnson,JULIOMontilva,MOHAMED Sati,et al.Field demonstration of a new method for making drillpipe connections duringmanaged pressure drilling operations[R].SPE 147278,2011.
[2]FLORENCE F,GUGGARIM,KOEDERITZW L,et al.Novel automation interface improves drilling efficiency and reliability[R].IADC/SPE 112637,2008.
[3]JOHNMorten G,KJETILArne K.High performance and reliability for MPD control system ensured by extensive testing[R].IADC/SPE 128222,2010.
[4]刘刚,邢纪国,夏宏南.欠平衡钻井节流压力控制技术[J].江汉石油学院学报,2002,24(4):53-54.
LIU Gang,XING Ji-guo,XIA Hong-nan.Underbalanced drilling throttle pressure control technology[J].Journal of Jianghan Petroleum Institute,2002,24(4):53-54.
[5]刘刚,杨忠峰,郑力会,等.欠平衡钻井计算机伺服控制节控箱试验研究[J].石油矿场机械,2001,29(5): 9-11.
LIU Gang,YANG Zhong-feng,ZHENG Li-hui,et al.Underbalanced drilling computer servo control section control box test[J].Oil Field Equipment,2001,29 (5):9-11.
[6]YANG Ou,YANG Xiao-ping,YONGHua.Simulation of the piezoelectric high-speed on/off valve[J].Chinese Science Bulletin,2008(17):2706-2711.
[7]王德玉,刘清友,何霞.高压节流阀的失效与受力分析[J].天然气工业,2005,25(6):94-96.
WANG De-yu,LIUQing-you,HEXia.The failure of the high pressure throttle and stress analysis[J].Natural Gas Industry,2005,25(6):94-96.
[8]王德玉,李才良,王启颜,等.电液比例节流井控系统的动态分析[J].特种油气藏,2006,13(2):101-104.
WANGDe-yu,LICai-liang,WANG Qi-yan,et al.Dynam ic analysis ofbattery-solution proportional throttle well control system[J].Special Oil and Gas Reservoirs,2006,13(2):101-104.
[9]张利平.液压气动系统设计手册[M].北京:机械工业出版社,1977:417-513.
[10]方昌林.液压、气压传动与控制[M].北京:机械工业出版社,2001:116-130.
[11]于浩洋,初红霞,王希凤.MATLAB实用教程-控制系统仿真与应用[M].北京:化学工业出版社,2009:4-55,114-193.
[12]丁振龙.平衡钻井井底压力自动控制技术研究[J].天然气工业,2007,27(7):63-65.
DING Zhen-long.Automatic control of bottomhole pressure during balanced drilling[J].Natural Gas Industry,2007,27(7):63-65.
[13]张晓东,李俊华.基于Fluent的锥形节流阀流场数值模拟[J].石油矿场机械,2009,38(9):50-52.
ZHANG Xiao-dong,LI Jun-hua.Numerical simulation for flow field of conicalwing valve based on fluent[J].Oil Field Equipment,2009,38(9):50-52.
Princip le and experim ent of a novel throttle pressure control system
LIU Gang1,CHANG Xin1,LIU Zhi-guo2,ZHAO Yong-bin1
(1.School of Petroleum Engineering in China University of Petroleum,Qingdao 266580,China; 2.Nuclear Science and Technology Institute in Beijing Normal University,Beijing 100875,China)
The control system with PID and proportional servo valve has the defectsof overshorting and long response time.A PLC and high-speed switch electromagnetic valve were used in the improved design.The components and its function of newly designed throttle pressure control device were introduced.A pressure controlmathematicalmodel was presented,and the dynamic response characteristics of this system were analyzed.The sensitivity and reliability of this system were tested and verified by pressure control and pressure step experiments.The results show that the pressure control fluctuations are less than±0.3 MPa.The pressure following effect is good.The pressure control system has high sensitivity and reliability under the experimental conditions of changing control pressure and flow rate.
throttle pressure;high-speed switch electromagnetic valve;numerical simulation;experiment
TE 831.1
A
10.3969/j.issn.1673-5005.2012.05.018
1673-5005(2012)05-0100-05
2012-03-12
国家科技支撑计划(2008BAB37B02)
刘刚(1960-),男(汉族),安徽利辛人,教授,博士,主要从事油气井工程方面的教学和科研工作。
(编辑 李志芬)
