一种基于游弋图像的水域监视鸟瞰图成像系统
2011-12-28郁建桥陈启美
顾 昊,徐 亮,郁建桥,陈启美
(1.南京大学电子科学与工程学院,江苏 南京 210093;2.江苏省环境监测中心,江苏 南京210036)
·信息应用·
一种基于游弋图像的水域监视鸟瞰图成像系统
顾 昊1,徐 亮2,郁建桥2,陈启美1
(1.南京大学电子科学与工程学院,江苏 南京 210093;2.江苏省环境监测中心,江苏 南京210036)
针对各类水域污染日趋严重而传统水质监测方式离散、范围受限等不足,构建了基于游弋图像的水域鸟瞰图成像系统,实现大范围实时、连续监控。使用偏振设备消除水面反光,得到清晰的水面图像。设计了摄像机内外参标定的方法,在线获得状态参数;提出了自适应空洞填补的策略,消除了由透视图映射至鸟瞰图时产生的图像空洞;结合GPS信息和图像特征配准技术,获取了由船载摄像机视频序列拼合成的鸟瞰全景图像。该方法具有分辨率高、实时性强、监测范围广和使用成本低等优势。
偏振;监测;标定;图像映射;图像融合;图像拼接
水质监测是水质评价与水污染防治的主要依据,目前中国内陆水体水面监视主要采取固定摄像机监控、人工巡逻监控、遥感监测等3种方法。其中固定摄像机监控需要昂贵的网络租赁费用,监控范围有限,画质也不够流畅;人工巡逻监控受主观限制,难以统一评价标准,因而无法获取量化数据;遥感监测利用卫星成像,价格昂贵而且成像效果易受天气状况制约[1]。
针对现有技术存在的不足,提出了一种简便易行,精度高且效果良好的水面监测方法。
1 系统架构
基于游弋图像的水域鸟瞰图成像系统,包含视频预处理模块、摄像机标定模块、图像变换模块和图像拼接模块,能够将摄像机侧视图像序列变换合成大范围水面俯视图。其算法流程如图1所示,主要包括以下步骤:
(1)视频预处理:在成像阶段使用光学偏振器件消除水面波光,降低干扰。
(2)摄像机标定:自适应计算摄像机内外参数,获取从侧视图到俯视图的转换矩阵。
(3)图像变换:利用转换矩阵进行图像映射,并填补映射造成的空洞。
(4)图像拼接:对变换后的视频序列进行图像拼接,获取大范围鸟瞰图。

图1 水面鸟瞰成像系统流程
2 视频预处理
摄像机接收湖面的反射光线进行成像,来自湖面的反射光包括水面的镜面反射和水中物体的漫反射。所需要的水面信息来自漫反射,但镜面反射部分亮度很高,使成像结果表现为亮斑,无法看清水面,故必须加以去除。数字图像处理的波光去除方法并不能真实还原水面图像,而且会降低图像质量。由于漫反射光和太阳光一样属于自然光,而镜面反射光是偏振光,故可采用加装偏振片的方法予以滤除。如图2所示,在摄像机前加装偏振片,调节其偏振方向,使之与镜面反射光偏振方向垂直,从而使镜面反射光无法穿过偏振片,摄像机得到有用的水面图像。如图3所示,加装偏振片前,水面有明显的亮光,经偏振处理后,可清晰看到水中的蓝藻[2]。

3 鸟瞰图成像
3.1 摄像机标定
在经典Tsai模型的基础上,针对监测系统性能要求和水面成像特点,进行相应修正,提出图4所示的视觉模型[3]。

图4 摄像机成像模型
鉴于船艇游历过程中世界坐标系不断变化,而固定摄像机内参不变,故采用内外参分别标定的方法。首先在室内实验环境下完成内参标定,采用基于标定模板的四点标定法,以保证精度。外参进行在线标定,通过提取地平线位置实现。
图5显示了抽象的船载摄像机模型,假设摄像机镜头相对于水平面的旋角为0,相对于船行驶方向的偏角为0,若非0可通过调整使然,因此只需求解倾角t。当图像中地平线可见时,根据式(1)利用地平线纵坐标值vs0求解倾角t。


图5 船载摄像机模型
3.2 图像变换
通过标定模块获得成像矩阵后,可以直接进行相机获取的侧视图和目的俯视图之间的转换。如图6所示,俯视图中点(X,Y)对应参考图中的(x,y),二者相互关系由映射矩阵P衔接。对于参考域中的点(x,y),可以直接计算出其在目的域中的坐标(X,Y),将像素值赋给目的坐标即可。通常计算出的(X,Y)非整数点,取最邻近的整数点代替。由于俯视图中远景分辨率低,近景分辨率高,正向映射会导致很多空洞的出现,必须进行空洞填补操作以保证图像信息的完整。由于侧视图到俯视图的转化生成的空洞具有近小远大、分布规则的特点,采取近处利用splatting方法,远处采用网格填补的策略(图 7),结果如图 8 所示[4,5]。

3.3 图像拼接及融合
对摄像机获取的每一帧图像,利用差分GPS设备精确获取摄像机位置,再根据自动在线标定的摄像机状态参数计算出图像对应的实际地理位置,对相关数据进行赋值,巡逻艇经过的周围水域均可完成成像。对于湖面信息特别丰富、分辨率要求很高的地点,采用特征匹配的拼接算法,利用SIFT算子进行图像匹配,RANSAC算法进行图像转换,重叠部分采用最佳缝合线算法定位拼缝,然后采用匹配二阶统计灰度值的亮度调和算法:设基准图像A和待拼接图像B的平均灰度值分别为μA和μB,标准差分别为 σA和 σB,在配准的(m,n)点,有

对配准后不重叠的区域,利用直方图均衡化方法以及羽化算法进行处理,消除了鬼影和曝光差异,最终获得高精度的湖面图像[6-9]。
4 实验结果
系统采用Core i7 E5520处理器,3 GB DDR3内存,500 GB硬盘,海康DS-4008HC视频采集卡,在SUSE11.1操作系统下开发。如图9所示,太湖流域可看成内接于一个矩形。由于该成像方法分辨率较高,用单幅图像表示处理较困难,因此将整个太湖水域划分为30×30个正方形区域。从东经119.85°到 120.6°,北纬 30.87°到 31.62°,每块区域代表2500 m×2500 m大小,以一个1000×1000像素的图像表示,精度达到2.5 m。根据实际需要,可以通过提高单个图像分辨率或增加区域数目提高精度。
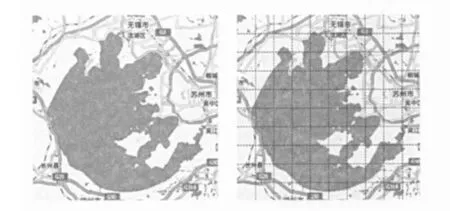
图9 湖面区域划分示意
图10显示的是当巡逻艇在湖面由西南向东北方向行进时,系统根据GPS信息进行湖面拼接得到的效果(部分截图,非完整图像)。而对细节要求较高的部分,采用特征匹配进行高精度拼接,效果如图11所示。

图10 基于GPS的湖面拼接部分截图

图11 基于特征匹配的高精度拼接效果图
5 结语
笔者构建了基于游弋图像的鸟瞰图成像系统总体结构,采用偏振器件消除反光,以摄像机自标定进行图像转换,利用自适应插值完成空洞填补,基于SIFT和RANSAC技术实现图像拼接,最终获取到水面大范围鸟瞰图。系统在现场运行中实现了鸟瞰图成像,验证了算法的有效性、鲁棒性及自身的稳定性。但是SIFT算法在图像特征不丰富时效果不理想,今后需对其进行不断研究和改进。
[1] 彭文祥,王海银,姜庆五.基于多时相卫星数据的太湖蓝藻暴发的动态变化监测[J].复旦学报,2008,35(1):63-66.
[2] TANIZAKI T.A detection of wet condition on road using a background image renewal processing [J].Trans.Inst.Electron.Inform.Commun.Eng.,1997,80(9):2270-2277.
[3] 李勃,董蓉,陈启美.路况PTZ摄像机自动标定方法[J].北京邮电大学学报,2009,32(21):24-29.
[4] 郑新,吴恩华.生成当前视点目标图像的快速逆映射算法[J].软件学报,2001,12(11):1667-1674.
[5] 张淮声,张佑生,方贤勇.基于图像warping的空洞填补方法[J].计算机科学,2002,29(5):112-114.
[6] 刘立,彭复员,赵坤,等.采用简化SIFT算法实现快速图像匹配[J].红外与激光工程,2008,37(1):181-184.
[7] LI G,WANG K.Merging infrared and color visible images with a contrast enhanced fusion method[J].Proc.SPIE,2007,65(7):108.
[8] 曲天伟,安波,陈桂兰.改进的RANSAC算法在图像配准中的应用[J].计算机应用,2010,30(7):1849-1851.
[9] 方贤勇,潘志庚,徐丹.图像拼接的改进算法[J].计算机辅助设计与图形学学报,2003,15(11).
An Imaging System Based on Mobile-Camera for Top View of Water Surface Monitoring
GU Hao1,XU Liang2,YU Jian-qiao2,CHEN Qi-mei1
(1.School of Electronic Science and Engineering,Nanjing University,Nanjing,Jiangsu 210093,China;2.Jiangsu Provincial Environmental Monitoring Center,Nanjing,Jiangsu 210036,China)
As various types of water pollution is worsening,the traditional way of monitoring isinsufficient because of dispersing and of limited range,a mobile-camera based imaging system for top view of water surface is built to achieve wide-ranging and continuous monitoring in real time.Reflective light of the water surface is eliminated by polarization devices,results in clear water images;new methods for camera calibration is designed so that parameters can be calculated on-line;strategy is proposed to fill the adaptive empty and eliminated the image empty after warpping to another view;with GPS information and registration technology,we get atop view image from the camera video sequences.This system can provide high resolution image with wide range and real time monitoring,besides,the cost is quite low.
polarization;monitoring;calibration;image warping;image fusion;image mosaic
TP75
A
1674-6732(2011)-05-0031-04
10.3969/j.issn.1674-6732.2011.05.009
2010-12-29;
2011-03-18
国家水体污染控制与治理科技重大专项项目(2009ZX07528-005-02),江苏省环保厅科研项目(2009017),江苏省环境监测中心项目(0917)。
顾昊(1988—),男,硕士研究生,从事图像处理及其应用的研究。
(本栏目编辑 黄 珊)
